一种可自动上线的高压输电线作业机器人的制作方法
本发明涉及输电线路作业设备,特别涉及一种可自动上线的高压输电线作业机器人。
背景技术:
1、高压输电线路由于常年暴露在风吹雨打的条件下,非常容易受到环境和地理因素的影响,为保证输电线路的正常运行,需要定期或不定期对线路做一些维护或检修工作。
2、当前,对于高压输电线路出现的各种故障以及定期巡检排查通常是通过人工来完成的,采用人工检修的方式,工作效率低,安全风险较高,而且人工维修的作业质量也难以保证,所以高压输电线作业机器人应运而生。高压输电线作业机器人是指在不断电的情况下对高压输电线缆及其附属设备开展测试、检修等作业的机器人。目前,市场上存在的一些高压输电线作业机器人在使用时,需要通过人工手动起吊或在高压塔架上架设上线轨道行走的方式来实现上线。采用上述方法实现上线的可靠性差,效率低且存在严重的安全隐患问题。
技术实现思路
1、针对背景技术中所存在的技术问题,本发明的目的在于提供一种可自动上线的高压输电线作业机器人,用于解决现有高压输电线作业机器人上线可靠性差、效率低且存在安全隐患的问题。
2、为了实现上述目的,本发明采用的技术方案如下:
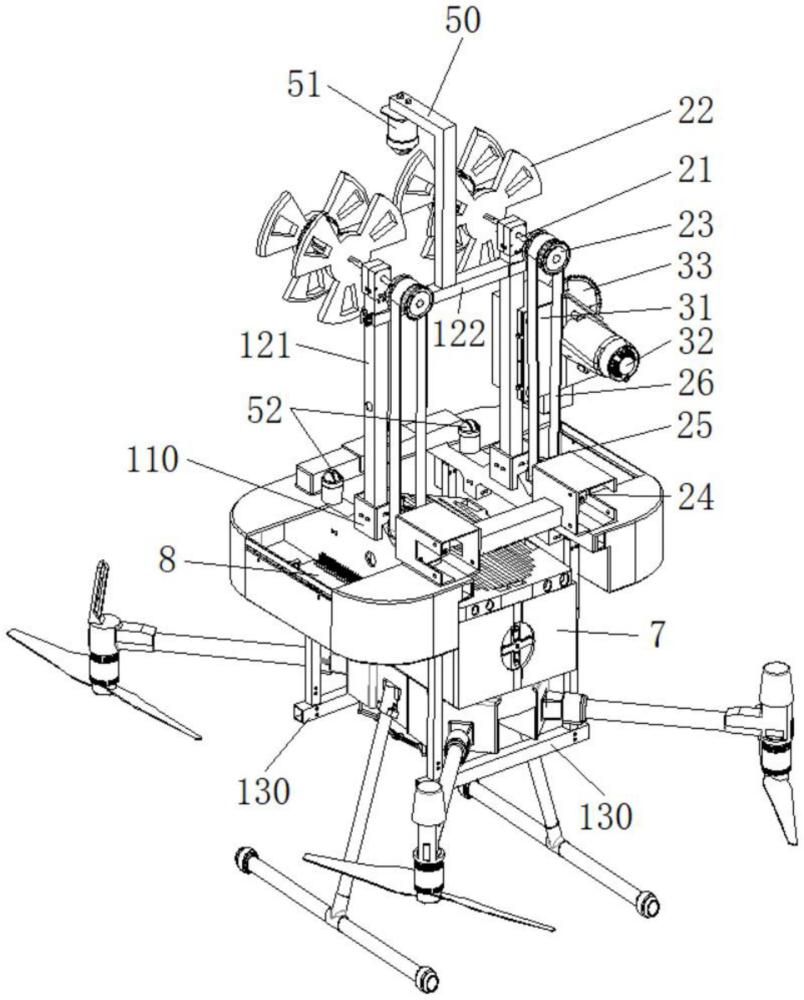
3、一种可自动上线的高压输电线作业机器人,包括:
4、机体,包括底座、固定在所述底座上方的第一支架以及固设在所述底座下方的第二支架。
5、行走组件,安装于所述机体上,用于实现机器人在高压输电线上行走。
6、作业组件,安装于所述第一支架一侧,用于实现对高压输电线上的悬挂物进行切割处理,或对高压输电线上的耐张线夹进行导电银浆喷涂动作。
7、巡检及自动上线监测组件,安装于所述机体上,用于实现对高压输电线的巡检以及机器人的自动上线状态监测。
8、飞行器,安装于所述第二支架上,用于实现机器人的自动上线动作。
9、控制组件,固定在所述机体上,所述的行走组件、作业组件、巡检及自动上线监测组件以及飞行器分别与所述控制组件电连接。
10、进一步地,所述的第一支架包括两竖直支撑杆以及分别与两竖直支撑杆固定连接的水平支撑杆。所述的竖直支撑杆和水平支撑杆均为中空碳纤维管,所述底座的顶部固设有两绝缘橡胶座,两竖直支撑杆底部分别固定在两绝缘橡胶座上。
11、进一步地,所述的行走组件包括对称设置在所述第一支架左右两侧的两组行走单元,所述的行走单元包括转动安装在所述第一支架上部的转轴、与所述转轴的一端相连的行走轮、与所述转轴的另一端相连的第一皮带轮、固定在所述底座上的驱动电机、与所述驱动电机的轴端相连的第二皮带轮以及用于传动连接所述第一皮带轮和第二皮带轮的传动皮带。
12、其中,所述的行走轮包括轮本体以及对称设置在所述轮本体两端的两限位本体。所述的轮本体包括用于行走在输电线上的内槽轮以及自所述内槽轮两端朝周向向外延伸并用于越障的两外槽轮,所述外槽轮在靠近内槽轮的一侧设有便于输电线滑入的斜面,所述内槽轮和外槽轮的外环面均为齿轮状结构。所述限位本体的周向尺寸大于所述外槽轮的周向尺寸。
13、优选地,所述内槽轮和外槽轮的外表面分别紧贴包覆有耐磨绝缘橡胶层,所述耐磨绝缘橡胶层的厚度为3-6mm。
14、优选地,所述的轮本体和两限位本体为一体成型结构。
15、限位本体的一种结构中,所述的限位本体包括固定环以及朝着所述固定环的周向向外延伸形成的若干叶片,所述的叶片上开设有用于减小风阻的第一过风孔。
16、限位本体的另一种结构中,所述的限位本体为盘状结构且表面开设有若干个用于减小风阻的第二过风孔。
17、进一步地,所述的巡检及自动上线监测组件包括固定在所述第一支架上的承托杆、固定在所述承托杆末端并位于两行走轮中间正上方的第一摄像头以及固定在所述底座上并分别位于两行走轮正下方的两第二摄像头。
18、优选地,还包括用于监测作业组件工作状态的视觉监测组件。所述的视觉监测组件包括固定在所述底座上的承托座、滑动安装在所述承托座上的滑台以及固定在所述滑台上的第三摄像头,所述滑台的侧边设有用于将滑台锁紧固定的锁付片。
19、一种实施方式中,所述的作业组件为切割组件,所述的切割组件包括固定在所述支撑架上的固定框、固定安装在所述固定框侧边的切割电机以及与所述切割电机的轴端相连的切割片。
20、另一种实施方式中,所述的作业组件为喷涂组件。所述的喷涂组件包括工作框、导电银浆供料组件、喷涂组件、驱动组件和控制器,所述的工作框固定在所述第一支架上。所述的导电银浆供料组件包括固定在所述工作框底部的导电银浆储液桶和高压泵,所述高压泵的进液口通过进液管与所述导电银浆储液桶相连,出液口连接出液管。所述的喷涂组件包括u型传输管以及设在所述u型传输管两末端内侧的两喷嘴,所述的u型传输管上开设有进桨口,所述进桨口与所述出液管相连。所述的驱动组件设置在所述工作框侧边,所述u型传输管与所述驱动组件相连并可在其驱动下移动及旋转。所述的控制器固定在所述工作框底部,所述的导电银浆供料组件和驱动组件分别与所述控制器电连接。
21、其中,所述工作框的一侧设有一倾斜板,所述的驱动组件安装在所述倾斜板上。所述的驱动组件包括固定在所述倾斜板内侧的支撑座、固定在所述支撑座上的丝杠导轨模组、安装在所述丝杠导轨模组上并可沿着所述倾斜板倾斜方向滑动的滑块、与所述滑块固定连接且一端向外穿出所述倾斜板的支撑杆、固定在所述支撑杆末端的旋转舵机以及与所述旋转舵机相连的承托盘。所述u型传输管的侧边固定在所述承托盘上,所述的倾斜板上沿着所述支撑杆的活动轨迹开设有让位槽。
22、其中,所述的u型传输管包括连接管以及分别与所述连接管两端相连通的第一管体和第二管体。所述的两喷嘴分别设在所述第一管体和第二管体的末端内侧且位置相对,所述第一管体的长度大于所述第二管体,所述第一管体与连接管的转角处、第二管体与连接管的转角处分别设有加强条。
23、优选地,所述的飞行器为无人机,所述的第二支架包括固定在所述底座下方的两托架,所述的无人机固定在两托架上。
24、本发明具有如下有益效果:
25、1、本发明的机器人可在飞行器和巡检及自动上线监测组件的配合下实现自动上线,同时还具备在高压输电线上行走、悬挂物切割/耐张线夹导电银浆喷涂及输电线巡检等多项功能,该机器人在带电作业时不需要人员接触高压输电线,解决了现有机器人人工上线导致的可靠性差、效率低以及存在安全隐患的问题。本发明的机器人可靠性及安全性高,工作效率高,结构设计合理,集成度高;
26、2、第一支架采用碳纤维材质制成,在满足强度要求的前提下,可以很好地控制机器人的整体质量,使得作业机器人可以搭载更多作业模块,通过在第一支架与底座的连接处设置绝缘橡胶座,使得两者实现绝缘分离,防止安装在底座上的电气元件受到高压输电线的电压干扰,保证了作业机器人的运行和作业安全;
27、3、行走轮设计为双槽轮结构,内槽轮用于线路巡检行走,外槽轮用于耐张线夹越障喷涂,使得高压输电线作业机器人在合理巡检速度内可以满足工作需求,且在保持高效率巡检的同时有较高的运动稳定性和可靠性;将内槽轮和外槽轮的外环面设计为齿轮状结构,且在内槽轮和外槽轮的外表面分别紧贴包覆耐磨绝缘橡胶层,可以进一步增加行走轮对输电线的抓取力,使得行走轮行走时的摩擦力更大,不容易发生打滑现象;通过在外槽轮靠近内槽轮的一侧设置斜面,使得输电线在行走轮上线时或越障后更容易滑入到内槽轮中,进一步提升行走的稳定性;轮本体和两限位本体为一体成型结构,使得行走轮整体结构更加稳定可靠;
28、4、通过设置切割组件,可以实现将悬挂在高压输电线上的气球线、飘带、风筝线等切断,大大降低因输电线路异物缠绕造成的线路跳闸事件,避免可能造成的直接或间接经济损失;
29、5、通过喷涂组件可将导电银浆喷涂到出现螺栓松动异常的高压输电线耐张线夹缝隙和螺栓处,快速降低耐张线夹电阻,从而实现耐张线夹快速降温,同时能够起到紧固耐张线夹的作用,无需人工再进行拧紧或并线动作,结构简单合理,使用方便快捷,大大提高了喷涂效率及安全性;
30、6、通过设置巡检及自动上线监测组件,第一摄像头和两个第二摄像头一方面可以实现对高压输电线进行全方位多维度巡检,当检测到输电线出现异物、散鼓、断鼓等异常现象时,及时将异常信息反馈给供电局,待后续进行检修更换,另一方面可以对机器人上线状态进行监测,观察行走轮在上线时是否有准确卡入到输电线中;
31、7、通过设置视觉监测组件,第三摄像头可以实时观察作业组件(切割/喷涂)是否正常工作,并方便工作人员调整机器人的工作位姿。
- 还没有人留言评论。精彩留言会获得点赞!