一种步进电机恒流驱动装置和方法与流程
本发明属于发动机调节,具体涉及一种步进电机恒流驱动装置和方法。
背景技术:
1、商业航天运载火箭发动机对液氧和甲烷推力调节阀的响应快速性和大负载起动能力有较高要求。常规步进电机主要采用两种驱动方式,一种是恒压驱动方式,另一种是恒流驱动方式,恒压驱动方式使用较为普遍,但是在高频的运行条件下,由于受到电感和反电势等因素的影响,使得相电流没能达到额定值便开始下降,相电流呈三角波形,平均输出力矩降低,步进电机甚至不能正常运转,无法满足商业航天运载火箭的大负载起动需求。此外,步进电机的恒压驱动设计需要串联较大电阻,使得串联电阻分得了大部分的电压和功率,消耗了较多的电能,从而电机的转换效率明显降低。另一种方案是通过恒流驱动的方式进行驱动,常规的恒流驱动方式是通过采样电阻采集绕组电流,通过比较电路实现,采用该方法步进电机的恒流驱动方式,若需更改驱动电流值,则需更换电路,无法实现电流的实时控制。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种步进电机恒流驱动装置和方法。本发明方案能够解决上述现有技术中存在的问题。
2、本发明的技术解决方案:
3、根据第一方面,提供一种步进电机恒流驱动装置,包括恒流驱动电流极性控制器、步进电机恒流驱动信号发生器和步进电机恒流驱动调制模块,所述的恒流驱动电流极性控制器根据输入的步进电机运行频率、步进电机运行步数和步进电机控制模式控制所述的步进电机恒流驱动调制模块的输出的步进电机a相电流极性na和步进电机b相电流极性nb,并发送给所述的步进电机恒流驱动信号发生器,所述的步进电机恒流驱动信号发生器根据步进电机a相电流极性na、步进电机b相电流极性nb、a相电流反馈cur_a_fb、b相电流反馈cur_b_fb、正向电流设置值current_set_p、负向电流设置值current_set_n和状态维持周期定时器设置值time_set,根据步进电机a相电流极性na、步进电机b相电流极性nb的输出值、状态维持周期定时器设置值按照设定的判断流程进行判断,选择相应的处理方式,并将处理获得的步进电机a相左桥臂上管q_pwmal+、a相左桥臂下管q_pwmal-、a相右桥臂上管q_pwmar+、a相右桥臂下管q_pwmar-、步进电机b相左桥臂上管q_pwmbl+、b相左桥臂下管q_pwmbl-、b相右桥臂上管q_pwmbr+、b相右桥臂下管q_pwmbr-输出给步进电机,从而驱动步进电机按照给定的频率和步数运行。
4、进一步的,所述的步进电机恒流驱动调制模块包括功率母线,步进电机a相左桥臂上管q_pwmal+、a相左桥臂下管q_pwmal-、a相右桥臂上管q_pwmar+、a相右桥臂下管q_pwmar-、步进电机b相左桥臂上管q_pwmbl+、b相左桥臂下管q_pwmbl-、b相右桥臂上管q_pwmbr+、b相右桥臂下管q_pwmbr-;
5、a相绕组左右两个桥臂之间设置电流传感器current_a,电流传感器的正极与通过驱动电路与步进电机a相绕组的输出端连接,电流传感器的负极与a相绕组右桥臂连接;b相绕组左右两个桥臂之间设置电流传感器current_b,电流传感器的正极与通过驱动电路与步进电机b相绕组的输出端连接,电流传感器的负极与b相绕组右桥臂连接。
6、进一步的,所述的步进电机a相电流极性na包括三种状态:na=1时表示,a相左桥臂上管q_pwmal+和a相右桥臂下管q_pwmar-均为工作状态,a相左桥臂下管q_pwmal-和a相右桥臂上管q_pwmar+均为关闭状态;na=0时表示,a相左桥臂上管q_pwmal+和a相右桥臂下管q_pwmar-均为关闭状态,a相左桥臂下管q_pwmal-和a相右桥臂上管q_pwmar+均为工作状态;na=-1时表示,a相左桥臂上管q_pwmal+和a相右桥臂下管q_pwmar-均为关闭状态,a相左桥臂下管q_pwmal-和a相右桥臂上管q_pwmar+均为工作状态。
7、进一步的,所述的步进电机b相电流极性nb包括三种状态:nb=1时表示,b相左桥臂上管q_pwmbl+和b相右桥臂下管q_pwmbr-均为工作状态,b相左桥臂下管q_pwmbl-和b相右桥臂上管q_pwmbr+均为关闭状态;nb=0时表示,b相左桥臂上管q_pwmbl+和b相右桥臂下管q_pwmbr-均为关闭状态,b相左桥臂下管q_pwmbl-和b相右桥臂上管q_pwmbr+均为工作状态;nb=-1时表示,b相左桥臂上管q_pwmbl+和b相右桥臂下管q_pwmbr-均为关闭状态,b相左桥臂下管q_pwmbl-和b相右桥臂上管q_pwmbr+均为工作状态。
8、进一步的,所述的判断流程为:
9、a)对na是否为零进行判断
10、若na为0,则a相左桥臂上管q_pwmal+、a相左桥臂下管q_pwmal-、a相右桥臂上管q_pwmar+、a相右桥臂下管q_pwmar-均设置为低电平,当前控制循环结束,进入下一个控制循环;
11、若na不为0,则进行na是否为1判断;
12、b)对na是否为1进行判断
13、若na为1,则对a相电流传感器current_a进行采集,若采集的a相绕组电流反馈cur_a_fb大于设置值current_set_p,则a相左桥臂上管q_pwmal+、a相左桥臂下管q_pwmal-、a相右桥臂上管q_pwmar+、a相右桥臂下管q_pwmar-均设置为低电平;
14、若采集的a相绕组电流反馈小于设定值,则判断状态维持周期定时器是否计时完毕,若计时未完成,则维持a相绕组四个桥臂的开关状态维持不变,当前循环控制结束,进入下一个循环控制,若计时完成,则对a相绕组四个开关管进行设置,a相左桥臂上管q_pwmal+和a相右桥臂下管q_pwmar-设置为高电平,a相右桥臂上管q_pwmar+和a相左桥臂下管q_pwmal-设置为低电平;
15、若na不为1,则进行na是否为-1判断;
16、c)对na是否为-1进行判断
17、若na不为-1,则a相左桥臂上管q_pwmal+、a相左桥臂下管q_pwmal-、a相右桥臂上管q_pwmar+、a相右桥臂下管q_pwmar-均设置为低电平。
18、若na为-1,则对a相电流传感器current_a进行采集,若采集的a相绕组电流反馈cur_a_fb小于置值current_set_p,则对a相绕组四个开关管进行设置,a相左桥臂上管q_pwmal+和a相右桥臂下管q_pwmar-设置为低电平,a相右桥臂上管q_pwmar+和a相左桥臂下管q_pwmal-设置为高电平;
19、同理,在对na进行判断的同时对nb进行判断。
20、根据第二方面,提供一种步进电机恒流驱动方法,包括以下步骤:
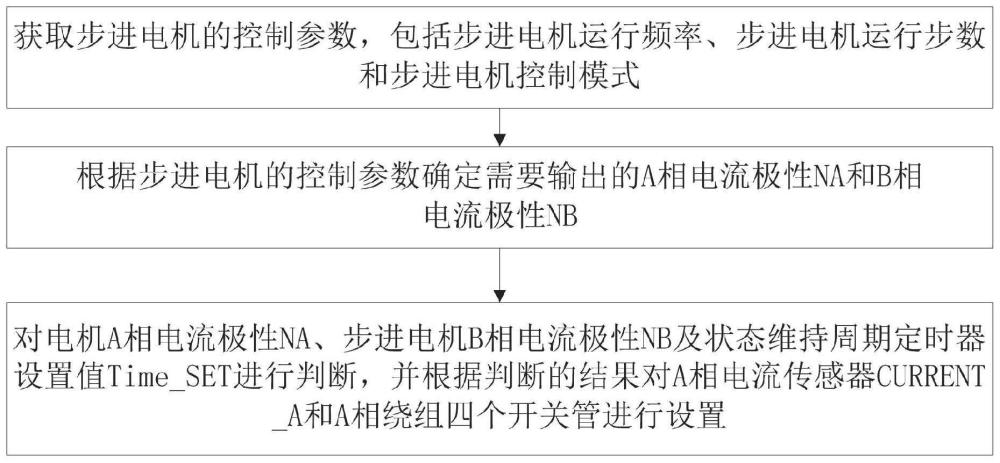
21、获取步进电机的控制参数,包括步进电机运行频率、步进电机运行步数和步进电机控制模式;
22、根据步进电机的控制参数确定需要输出的a相电流极性na和b相电流极性nb;
23、根据步进电机a相电流极性na、步进电机b相电流极性nb、a相电流反馈cur_a_fb、b相电流反馈cur_b_fb、正向电流设置值current_set_p、负向电流设置值current_set_n和状态维持周期定时器设置值time_set,对电机a相电流极性na、步进电机b相电流极性nb及状态维持周期定时器设置值time_set进行判断,并根据a相电流传感器current_a的电流反馈结果对a相绕组四个开关管进行设置,根据b相电流传感器current_b的电流反馈结果对b相绕组四个开关管进行设置。
24、进一步的,所述的对电机a相电流极性na、步进电机b相电流极性nb及状态维持周期定时器设置值time_set进行判断的方法为,包括以下步骤:
25、s3.1对na是否为零进行判断:若na为0,则a相左桥臂上管q_pwmal+、a相左桥臂下管q_pwmal-、a相右桥臂上管q_pwmar+、a相右桥臂下管q_pwmar-均设置为低电平,当前控制循环结束,进入下一个控制循环;若na不为0,则进入下一步;
26、s3.2对na是否为1进行判断:若na为1,则对a相电流传感器current_a进行采集,若采集的a相绕组电流反馈cur_a_fb大于设置值current_set_p,则a相左桥臂上管q_pwmal+、a相左桥臂下管q_pwmal-、a相右桥臂上管q_pwmar+、a相右桥臂下管q_pwmar-均设置为低电平;若采集的a相绕组电流反馈小于设定值,则判断状态维持周期定时器是否计时完毕,若计时未完成,则维持a相绕组四个桥臂的开关状态维持不变,当前循环控制结束,进入下一个循环控制,若计时完成,则对a相绕组四个开关管进行设置,a相左桥臂上管q_pwmal+和a相右桥臂下管q_pwmar-设置为高电平,a相右桥臂上管q_pwmar+和a相左桥臂下管q_pwmal-设置为低电平;
27、若na不为1,则进行下一步;
28、s3.3对na是否为-1进行判断:
29、若na不为-1,则a相左桥臂上管q_pwmal+、a相左桥臂下管q_pwmal-、a相右桥臂上管q_pwmar+、a相右桥臂下管q_pwmar-均设置为低电平;
30、若na为-1,则对a相电流传感器current_a进行采集,若采集的a相绕组电流反馈cur_a_fb小于置值current_set_p,则对a相绕组四个开关管进行设置,a相左桥臂上管q_pwmal+和a相右桥臂下管q_pwmar-设置为低电平,a相右桥臂上管q_pwmar+和a相左桥臂下管q_pwmal-设置为高电平;
31、同理,对nb进行判断,与对na进行判断同时进行,并完成b相电流传感器current_b的采集和对b相绕组四个开关管的设置。
32、根据第三方面,提供一种运载火箭发动机调节步进电机恒流驱动装置,包括所述的一种步进电机恒流驱动装置。
33、本发明与现有技术相比的有益效果:
34、本发明不需要更改驱动电流值,不需要更换电路,通过对na和nb的判断,从而采用不同的处理方法,获得恒流驱动的方式对步进电动机进行驱动,可实现电流的实时控制,使步进电机的控制更精确。
- 还没有人留言评论。精彩留言会获得点赞!