双通道步进马达控制系统及扫地机器人的制作方法
本技术智能机器人,尤其涉及一种双通道步进马达控制系统及扫地机器人。
背景技术:
1、随着科技的不断发展,智能扫地机器人应运而生,适配集尘器基站的智能扫地机器人可以做到每月清理一次尘袋使得智能扫地机器人的使用更便捷,但是,配置集尘器基站的智能扫地机器人的工作模式单一,从而导致扫地机器人的工作灵活性低。
技术实现思路
1、本实用新型的主要目的在于提供一种双通道步进马达控制系统,旨在提高扫地机器人的工作灵活性。
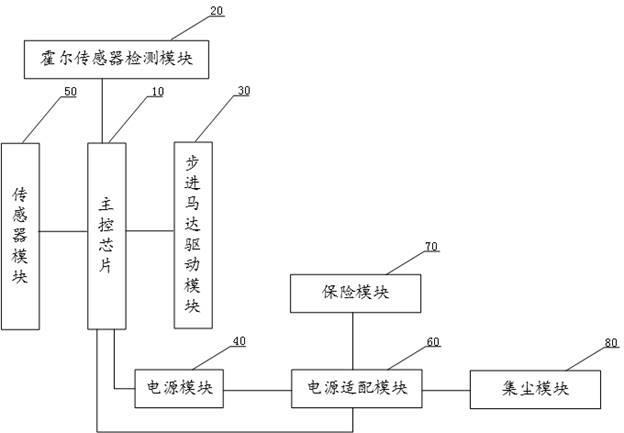
2、为实现上述目的,本实用新型提出一种双通道步进马达控制系统,所述双通道步进马达控制系统包括主控芯片、霍尔传感器检测模块、步进马达驱动模块和电源模块;
3、所述主控芯片的第一通信端连接所述霍尔传感器检测模块的通信端,所述主控芯片的第二通信端连接所述步进马达驱动模块的通信端,所述主控芯片的第三通信端连接所述电源模块的第一通信端;其中,
4、所述主控芯片用于根据所述霍尔传感器检测模块输出的霍尔传感器检测信号和所述电源模块输出的电源信号,向所述步进马达驱动模块输出对应的工作模式切换信号;
5、所述步进马达驱动模块用于根据所述工作模式切换信号,控制所述步进马达驱动模块中的步进马达切换工作通道,以切换所述双通道步进马达控制系统的工作模式。
6、可选地,所述霍尔传感器检测模块包括第一电阻、第二电阻、第一阀门和第二阀门,所述第一电阻的第一端和所述第二电阻的第一端连接所述主控芯片的第一通信端,所述第一电阻的第二端连接所述第一阀门的第一端,所述第二电阻的第二端连接所述第二阀门的第一端,所述第一阀门的第二端和所述第二阀门的第二端接地。
7、可选地,所述霍尔传感器检测模块还包括第三电阻、第四电阻、第五电阻、第一电容和霍尔传感器,所述第三电阻的第一端、所述第四电阻的第一端和所述第五电阻的第一端接电源,所述第三电阻的第二端连接所述第二电阻的第二端和所述第二阀门的第一端,所述第四电阻的第二端连接所述第一电阻的第二端和所述第一阀门的第一端,所述第五电阻的第二端连接所述第一电容的第一端,所述第一电容的第二端接地,所述第三电阻的第二端、所述第四电阻的第二端和所述第五电阻的第二端连接所述霍尔传感器。
8、可选地,所述步进马达驱动模块包括步进电机驱动单元、步进电机控制单元和电流检测单元,所述步进电机驱动单元的第一通信端连接所述主控芯片的第二通信端,所述步进电机驱动单元的第二通信端连接所述步进电机控制单元的第一通信端,所述步进电机控制单元的第二通信端连接所述电流检测单元的通信端。
9、可选地,所述步进电机驱动单元包括第六电阻、第七电阻、第八电阻、第九电阻、驱动芯片,第二电容、第三电容、第四电容、第五电容、第六电容、第一步进电机、第二步进电机、第三步进电机、第四步进电机和第五步进电机,所述第六电阻的第一端、所述第七电阻的第一端、所述第八电阻的第一端和所述第九电阻的第一端分别连接所述驱动芯片的第一输入端、第二输入端、第三输入端和第四输入端,所述第六电阻的第二端、所述第七电阻的第二端、所述第八电阻的第二端和所述第九电阻的第二端接地,所述第二电容的第一端、所述第三电容的第一端、所述第四电容的第一端和所述第五电容的第一端分别连接所述驱动芯片的第一输出端、第二输出端、第三输出端和第四输出端,所述第二电容的第二端、所述第三电容的第二端、所述第四电容的第二端和所述第五电容的第二端接地,所述第六电容的第一端连接所述驱动芯片的第五输入端,所述第六电容的第二端连接所述驱动芯片的第五输出端和所述步进电机控制单元的第一通信端,所述第二电容的第一端、所述第三电容的第一端、所述第四电容的第一端和所述第五电容的第一端分别连接所述第一步进电机的第一端、所述第二步进电机的第一端、所述第三步进电机的第一端和所述第四步进电机的第一端,所述第一步进电机的第二端、所述第二步进电机的第二端、所述第三步进电机的第二端、所述第四步进电机的第二端和所述第五步进电机的第一端连接所述霍尔传感器检测模块中的霍尔传感器。
10、可选地,所述步进电机控制单元包括第一开关管、第十电阻、第十一电阻、第十二电阻、熔断器、第三阀门、第七电容、第八电容、第九电容和第六步进电机,所述第一开关管的漏极连接所述第十电阻的第一端,所述第一开关管的源极、所述第十一电阻的第一端、所述第七电容的第一端和所述第三阀门的第一端接电源,所述第十一电阻的第二端连接所述第十二电阻的第一端,所述第一开关管的栅极连接所述第十二电阻的第二端,所述第七电容的第二端和所述第三阀门的第二端接地,所述第十电阻的第二端连接所述熔断器的第一端,所述熔断器的第二端连接所述第八电容的第一端、所述第九电容的第一端和所述第六步进电机的第一端,所述第八电容的第二端和所述第九电容的第二端接地,所述第六步进电机的第二端连接所述第七电容的第二端和所述第五步进电机的第二端。
11、可选地,所述步进电机控制单元还包括第十三电阻、第十四电阻、第十五电阻和第二开关管,所述第十三电阻的第一端连接所述第十一电阻的第二端和所述第十二电阻的第一端,所述第十三电阻的第二端连接所述第二开关管的集电极,所述第二开关管的基极连接所述第十四电阻的第一端和所述第十五电阻的第一端,所述第二开关管的发射极和所述第十五电阻的第二端接地。
12、可选地,所述电流检测单元包括电流采样芯片、第十电容、第十一电容、第十二电容,第十六电阻和第十七电阻,所述第十六电阻的第一端连接所述电流采样芯片的第一输入端,所述第十六电阻的第二端和述电流采样芯片的第二输入端接地,所述第十电容的第一端和所述第十一电容的第一端连接所述电流采样芯片的第三输入端,所述第十电容的第二端和所述第十一电容的第二端接地,所述电流采样芯片的第一输出端连接所述第十七电阻的第一端,所述第十七电阻的第二端连接所述第十二电容的第一端,所述第十七电阻的第二端接地,所述电流采样芯片的第二输出端连接所述第十电阻的第二端,所述电流采样芯片的第三输出端连接所述第十电阻的第一端。
13、可选地,所述双通道步进马达控制系统还包括传感器模块、电源适配模块、保险模块和集尘模块,所述传感器模块的通信端连接所述主控芯片的第四通信端,所述电源适配模块的第一通信端连接所述主控芯片的第五通信端,所述电源适配模块的连接所述电源模块的第二通信端和所述保险模块的通信端,所述电源适配模块的第三通信端连接所述集尘模块的通信端。
14、此外,本实用新型还提供一种扫地机器人,包括软管接头、双通道吸口和双通道步进马达控制系统;
15、所述双通道步进马达控制系统用于切换所述扫地机器人的工作模式,所述霍尔传感器检测模块的霍尔传感器用于检测所述软管接头是否在位,所述步进马达用于切换所述双通道吸口的工作通道,所述扫地机器人被配置为如上所述的双通道步进马达控制系统。
16、本实用新型包括主控芯片、霍尔传感器检测模块、步进马达驱动模块和电源模块;所述主控芯片的第一通信端连接所述霍尔传感器检测模块的通信端,所述主控芯片的第二通信端连接所述步进马达驱动模块的通信端,所述主控芯片的第三通信端连接所述电源模块的第一通信端;其中,所述主控芯片用于根据所述霍尔传感器检测模块输出的霍尔传感器检测信号和所述电源模块输出的电源信号,向所述步进马达驱动模块输出对应的工作模式切换信号;所述步进马达驱动模块用于根据所述工作模式切换信号,控制步进马达切换工作通道,以切换所述双通道步进马达控制系统的工作模式。本实用新型通过设置主控芯片、霍尔传感器检测模块、步进马达驱动模块和电源模块,在霍尔传感器检测模块检测到触发信号时,则向主控芯片输出对应的霍尔传感器检测信号,主控芯片根据霍尔传感器检测信号和电源模块提供的电源信号向步进马达驱动模块输出对应的工作模式切换信号,进一步地,步进马达驱动模块在接收到工作模式切换信号后,通过控制步进马达的正转和反转来带动阀门的移动,从而完成步进马达的工作通道的切换,以切换双通道步进马达控制系统的工作模式,提高了扫地机器人的灵活性。
- 还没有人留言评论。精彩留言会获得点赞!