一种基于电压矢量投影的双三相永磁电机预测电流控制方法
本发明属于多相电机驱动控制领域,尤其是涉及一种基于电压矢量投影的双三相永磁电机预测电流控制方法。
背景技术:
1、双三相永磁电机作为一类常见的多相电机,具有输出转矩波动小、容错能力强、功率密度高等显著优点,在电动汽车、航空航天和舰艇推进等交通运输领域具备广阔应用前景。
2、双三相永磁电机驱动系统需同时控制两套定子绕组,且六相逆变器开关组合众多,导致其调制策略相对复杂,实现难度较高。近年来,有限集模型预测控制在动态性能表现优越、易于实现多变量控制、无需调制环节等方面具有诸多优势,在双三相永磁电机驱动领域受到了广泛关注并取得了成功应用。在采用有限集模型预测的双三相永磁电机驱动系统,除了面临普通三相电机系统中控制自由度受限和参数敏感性高的问题外,还需应对备选电压矢量众多、控制效果评估难度高等特有技术难点。近年来,国内外学者提出了多种改进算法,解决了在线运算量压缩、权重系数优化、稳态控制精度提升等关键科学问题。然而,双三相电机系统预测控制算法在控制自由度和稳态性能方面仍存在进一步的改进空间。
3、针对传统方法中的这些问题,本发明提出了一种基于电压矢量投影的双三相永磁电机预测电流控制方法。
技术实现思路
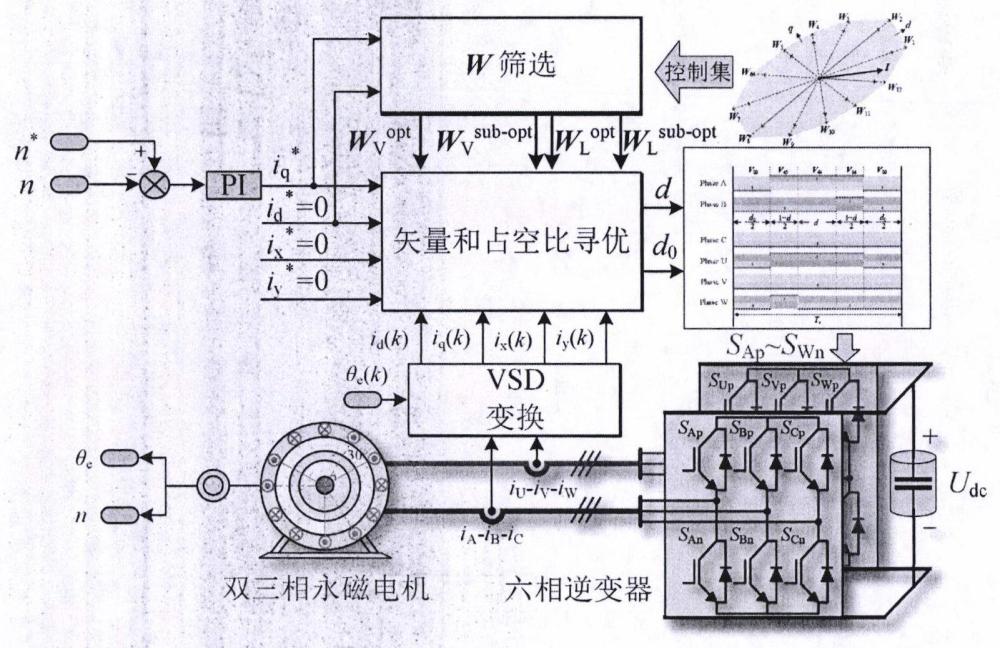
1、为克服现有技术的不足,本发明提供一种基于电压矢量投影的双三相永磁电机预测电流控制方法。该方法通过将大矢量扩充至控制集,并梳理六相逆变器的开关合成原则,实现零矢量开关模式、虚拟矢量开关模式和大矢量开关模式之间的平滑切换,再通过电压矢量投影的方法,找到投影空间内参考量与备选向量之间的直接对应关系,实现了在仅需4次枚举的前提下,电机具有更优的稳态运行性能。
2、本发明所采用的技术方案是,基于电压矢量投影的双三相永磁电机预测电流控制方法。具体内容如下:
3、第1)步:根据空间矢量解耦理论,双三相永磁电机的物理量可以映射到三个相互正交的子空间,分别是参与机电能量转换的α-β基波子空间,x-y谐波子空间,以及o1-o2零序子空间。因此,双三相永磁电机在旋转坐标系(d-q)下的电压和磁链方程可表示为:
4、
5、
6、式中,vd、vq、vx、vy分别为d-q坐标系和x-y坐标系下的定子电压,id、iq、ix、iy分别为d-q坐标系和x-y坐标系下的定子电流,分别为d-q坐标系和x-y坐标系下的定子磁链。ωe、rs、ld、lq、laa1、分别为电机的电角速度,定子电阻,d轴电感,q轴电感,漏感以及电机永磁体磁链。
7、根据欧拉离散方程,双三相永磁电机的预测电流模型可表示如下:
8、
9、
10、式中,vd(k)、vq(k)、vx(k)、vy(k)表示kts时刻的d轴,q轴,x轴和y轴的定子电压,id(k)、iq(k)、ix(k)、iy(k)表示kts时刻的d轴,q轴,x轴和y轴的定子电流,id(k+1)、iq(k+1)、ix(k+1)、iy(k+1)表示(k+1)ts时刻的d轴,q轴,x轴和y轴的定子电流,ts为离散控制周期。
11、采用预测电流控制方法对进行电机的控制时,不论采用何种控制集合,都需要依赖预测模型来获取备选电压矢量作用下的电流预测值。随后,这些预测值会被代入下述价值函数g中,用以评价各矢量的控制效果。价值函数的具体表达式如下:
12、
13、式中,id*,iq*,ix*,iy*分别表示电机在d-q-x-y坐标系下的参考电流,λ表示权重系数,ilim表示电机的最大工作电流约束。
14、第2)步:虚拟电压矢量的合成。以虚拟矢量vv2为例,选定三个相邻大矢量v44、v64和v66作为基本电压矢量。要求合成后的vv2与v64具有相同的相位,并确定基本电压矢量v44、v64和v66的总作用时间等于ts,则各基本电压矢量作用时间可表示为:
15、
16、式中,tv44、tv64、tv66分别代表单位控制周期内合成虚拟电压矢量vv2时电压矢量v44,v64和v66的作用时间,而d表示电压矢量v64的占空比。如果按上式进行虚拟矢量vv2的合成,则其在α-β平面和x-y平面上的幅值可由下式表示:
17、
18、式中,|vαβ|、|vxy|表示虚拟矢量vv1在α-β平面和x-y平面的幅值,udc为直流母线电压。
19、通过电压矢量在基波平面和谐波平面上幅值的表达式可知,当时,|vvx-y|=0且|vvα-β|=0.598udc。比时虚拟矢量vv2与传统方式合成的虚拟矢量具有相同的输出幅值。值得指出的是,借助v44、v64和v66三个相邻大矢量来合成vv2,可在合成过程中避免利用到中矢量,从而在矢量选择方面减弱双三相永磁电机谐波子空间的电流幅值。通过在合成的虚拟矢量vv2两侧加入零矢量v00,即可得到占空比调制后的虚拟矢量。此时,虚拟矢量在x-y平面的幅值仍保持为零,而在α-β平面的幅值可由下式表示:
20、
21、式中,d0表示零矢量的占空比。由上式可知,通过选定不同数值的d和d0,本专利给出的矢量开关模式使得零矢量v00、虚拟矢量vv2、占空比调制后的虚拟矢量(vv2+v00)和大矢量vl之间能够实现平滑切换。
22、类似的,可以确定其他虚拟矢量的开关模式。将超前于虚拟矢量的基本矢量定义为vlead,将滞后于虚拟矢量的基本矢量定义为vlag,而与虚拟电压矢量相位相同的基本矢量定义为vfit,则合成各虚拟矢量所需的基本矢量及其占空比可表示如下:
23、
24、式中,tv00、tvlead、tvlaf和tvfit分别表示电压矢量v00、vlead、vlaf和vfit的作用时间。
25、由上式可知,当d0=1,d=0时,此时输出的电压矢量为零矢量;当d0=0,时,此时输出的电压矢量为虚拟矢量。当d0=0~1,并且d0+d=1时,此时输出的电压矢量变为占空比调制后的虚拟矢量。最后,当d0=0,d=1时,输出的电压矢量将变为大矢量。
26、第3)步:价值函数与电压矢量空间投影。由双三相永磁电机的预测电流模型及价值函数的表达式,可将价值函数转化为如下形式:
27、g=|i-w|2
28、式中,i=id+jiq,w=wd+jwq。i和w分别表示定子电流误差矢量和电压矢量。
29、
30、
31、式中,id、iq、wd和wq分别表示等效变换后的d轴和q轴定子电流误差矢量和电压矢量。
32、将转化后的价值函数的解对应于优化问题的解,即求解的解,从而可得w的最优解wopt=i。换句话说,令价值函数取最小值的w向量等价于复平面内距离i向量最近的w向量。需要强调的是,经w变换后,矢量空间不再满足对称性,因此可利用6条直线①、②、...对矢量空间进行分割,以便快速确定出四个备选w向量,即wvopt、wvsub-opt、wlopt和wlsub-opt,线条斜率计算具体如下所示。
33、
34、
35、
36、
37、
38、
39、式中,θe表示电机的转子位置角。σ①、σ②、σ③、σ④、σ⑤和σ⑥分别表示6条直线的斜率。
40、第4步:滚动优化。为了优化wvopt、wvsub-opt、wlopt和wlsub-opt的控制效果,在w空间中也使用占空比调制策略。价值函数可转化为如下形式。
41、
42、
43、根据转化后的价值函数表达式,如果有
44、
45、由上式可知,优化结果可进一步表示为:
46、
47、直观上看,输出电压矢量的最优占空比必然存在于优化结果的集合中,通过结合矢量空间的分解直线和优化结果的表达式,我们可快速确定最优输出电压矢量及其占空比。然而,需要注意的是,价值函数在等效变换中,省略了关于x-y谐波子平面的评价项,而wlm(等效变换后的大矢量)实际上包含有关谐波控制的影响。因此,根据所构建的双三相永磁电机的预测电流模型、虚拟矢量占空比集合的计算及设定、电压矢量的搜索及选择,将三者作为相应的约束条件带入价值函数来进行最优电压矢量的选取。在进行电压矢量搜索和选择时满足的表达式如下:
48、
49、式中,vvopt、vvub-opt、vlopt和vlsub-opt分别表示未经过投影变换的原始电压矢量wvopt、wvsub-opt、wlopt和wlsub-opt。由上述表述可以看出,经w投影变换后,优化问题的可行域与候选矢量空间规模不再等价,可行域内仅包含vvopt、vvsub-opt、vlopt和vlsub-opt四个备选矢量,在仅需4次枚举寻优后,即可获得价值函数g的最优解。
50、相较于现有技术方案,本发明的技术方案所带来的有益效果是:
51、本发明将传统虚拟矢量合成方式改进为相邻三个大矢量合成,减小了电流纹波。其次,通过梳理六相逆变器开关合成原则,实现零矢量开关模式、虚拟矢量开关模式和大矢量开关模式之间的平滑切换,提高了电压的利用率。最后,提出电压矢量投影方法,在投影空间内实现了参考量与备选向量间的直接对应关系,大幅降低了优化问题可行域的搜索范围。最终,在仅需4次枚举的前提下,不仅保证算法具备大矢量方向上的连续电压输出能力,还实现了更优的稳态运行性能。
- 还没有人留言评论。精彩留言会获得点赞!