基于AUKF的开关磁阻电机转子位置估计方法
本发明涉及开关磁阻电机无位置控制领域,尤其是一种基于aukf的开关磁阻电机转子位置估计方法。
背景技术:
1、开关磁阻电机因其具有结构简单,成本低,效率高,容错能力强等优点,在飞机,电动汽车,风力发电等领域受到广泛关注。开关磁阻电机的精确换相控制当中,转子位置信息的准确性至关重要。一般通过在开关磁阻电机控制系统中安装位置传感器来获取转子位置,然而传统的位置传感器通常安装在高温、潮湿、多尘等恶劣环境下,其可靠性会大大降低,而且安装位置传感器会增加开关磁阻电机的成本,因此,研究无位置传感器的转子位置间接检测方法十分必要。传统的无位置控制方法包括:3-d查表法,基于电感/磁链模型的方法,智能算法,电流/电感梯度检测法,状态观测器法等。然而,以上大多数算法都只能在特定的转速区域内使用,并且抗外界干扰的能力较低,导致转子位置估计的精度不高。为了提高开关磁阻电机位置估计的精度和抗干扰能力,需要一个有效方案解决上述问题。
技术实现思路
1、本发明的目的是针对已有技术中存在的问题,提供一种基于aukf的开关磁阻电机转子位置估计方法。
2、本发明提出的技术方案为:
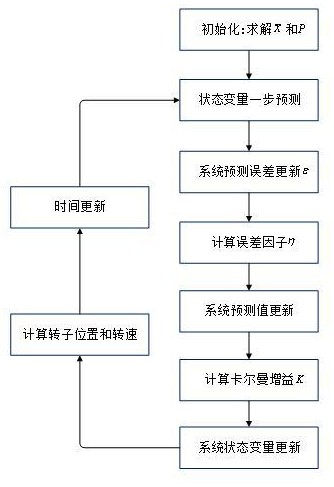
3、一种基于aukf的开关磁阻电机转子位置估计方法,是选取电机相电流、转速、转子位置构成状态向量,选择电机相电流为观测信号,利用ukf算法原理估计开关磁阻电机转子位置和转速。ukf适用于非线性系统,通过使用无迹变换(ut)对非线性函数的概率密度分布进行近似,用一系列确定样本来逼近状态的后验概率密度,而不是对非线性函数进行线性化,提高了估计的精度和稳定性。本发明在ukf算法的基础上引入了自适应因子,使系统能够根据观测信号预测误差动态调整协方差矩阵,进一步提高了转子位置估计的精度。具体步骤如下:
4、(1)根据开关磁阻电机数学模型确定状态向量、观测信号及输入信号。
5、开关磁阻电机的数学模型为:
6、 (1)
7、式(1)中, i表示相电流, ω表示电机转速, θ表示电机转子位置, r表示相绕组电阻, φ表示相磁链, uph表示相电压, d表示粘性摩擦系数, j表示转动惯量, te表示电磁转矩, tl表示负载转矩。 linc表示增量电感,其定义如下:
8、 (2)
9、其中, l表示相电感。
10、根据开关磁阻电机的数学模型,选取的状态向量为:,观测信号为:,输入信号为:。
11、(2)系统初始化
12、根据步骤(1)的简要介绍,开关磁阻电机的状态空间方程可列为:
13、 (3)
14、其中。 tl设定为常值, te存储在 i-θ-te二维查找表中。
15、利用欧拉法将状态空间方程离散化后可得:
16、 (4)
17、因此,开关磁阻电机非线性系统的状态方程和观测方程可表示为:
18、 (5)
19、式(5)中, ts为采样时间, w( k)和 v( k)是过程噪声和测量噪声,是均值均为0,方差分别为 q和 r的高斯白噪声,且 q和 r均为对称矩阵。
20、状态向量x的均值和协方差p通过式(6)和式(7)获得:
21、 (6)
22、 (7)
23、式(6)、(7)中的e为均值符号。
24、(3)状态向量一步预测
25、aukf的核心理念是近似非线性函数的概率分布比近似非线性函数本身更容易,并且准确度更高,计算量更小。近似非线性函数的概率分布是通过无迹变换(ut)实现的。ut变换是在原状态分布中按某一规则选取一些采样点,使这些采样点的均值和方差等于原状态分布的均值和协方差;将这些点代入非线性函数中,相应得到非线性函数值点集,通过这些点集求取变换后的均值和方差。
26、状态向量的一步预测及协方差矩阵是由ut变换得到的2n+1个sigma点的预测值加权求和得到,具体求取步骤如下:
27、(i)利用无迹变换(ut)变换获取sigma点集
28、 (8)
29、式(8)中, 表示第 j个sigma点, n表示状态的维数, 表示矩阵方根 的第 j列。
30、(ii)计算sigma点集的权值
31、 (9)
32、式(9)中,; α满足,通常取一个较小值;满足,通常取或;待选参数 β非负。 和分别表示第 j个采样点的均值权值和协方差权值。
33、(iii)计算sigma点集的一步预测
34、 (10)
35、(iv)计算状态向量的一步预测及协方差矩阵
36、 (11)
37、 (12)
38、(4)系统预测误差更新
39、本发明选择电机相电流作为观测信号,其能通过安装在相绕组上的电流传感器直接检测得到。通过实际检测值与系统预测值间的误差来确定自适应因子η的值,自适应因子能够影响卡尔曼增益的取值,进而提高状态向量的估计精度,达到系统自适应的效果。
40、预测误差的定义为:
41、 (13)
42、式(13)中,表示上一时刻通过电流传感器检测得到的实际观测值,表示上一时刻的系统观测预测值的均值。
43、(5)计算自适应因子
44、自适应因子的定义为:
45、 (14)
46、式(14)中,表示上一时刻的系统观测预测值的协方差, tr为求迹符号。
47、系统观测预测值更新
48、根据状态向量一步预测,再次使用ut变换,产生新的sigma点集:
49、 (15)
50、将新的sigma点集代入观测方程,得到系统观测预测值:
51、 (16)
52、根据系统观测预测值,求解其均值和协方差:
53、 (17)
54、 (18)
55、 (19)
56、(7)计算卡尔曼增益
57、 (20)
58、(8)系统状态变量更新
59、 (21)
60、 (22)
61、式(21)、(22)中,表示系统状态向量预测值的均值,表示系统状态向量预测值的协方差,表示通过电流传感器检测得到的实际观测值,表示系统观测预测值的均值。
- 还没有人留言评论。精彩留言会获得点赞!