一种用于四差速轮式巡检机器人的自动充电管理系统的制作方法
本发明涉及巡检机器人充电,尤其涉及一种用于四差速轮式巡检机器人的自动充电管理系统。
背景技术:
1、四差速轮式防爆巡检机器人,适用于煤矿变电所、水泵房等空间狭小、地面凹凸不平场景,具备尺寸小、行走灵活、越障能力强、外形美观等特点,可代替人工完成日常巡检任务,有效避免人工巡检出现的漏检、误测、存档图片模糊等问题,保证巡检工作的全面性、准确性。巡检机器人在各种工业生产场景中的应用日益普遍,其具有高效率、精准性和可靠性等优势,能够代替人工进行巡检任务,提高生产效率和质量。
2、在现代工业生产中,巡检机器人的长时间工作离不开持续的电力供应,巡检机器人的电池电量管理成为一个迫切需要解决的问题。因此我们提出一种用于四差速轮式巡检机器人的自动充电管理系统,来解决上述中遇到的问题。
技术实现思路
1、针对现有技术存在的不足,本发明提供一种用于四差速轮式巡检机器人的自动充电管理系统,以解决上述背景技术中提出巡检机器人的长时间工作离不开持续的电力供应,巡检机器人的电池电量管理成为一个迫切需要解决的问题。
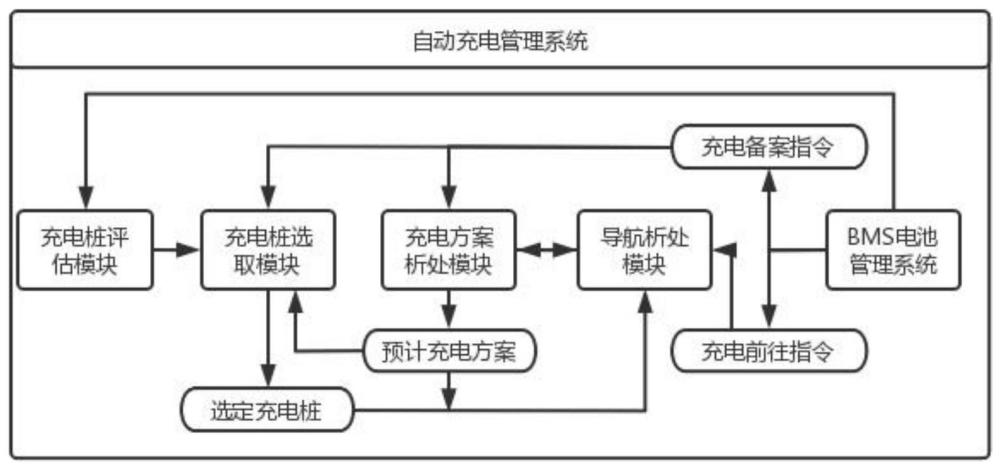
2、本发明的目的可以通过以下技术方案实现:包括bms电池管理系统、充电桩评估模块、充电方案析处模块、充电桩选取模块和导航析处模块;
3、所述bms电池管理系统用于实时监测电池电量;设定电量指令映照组,将电池电量与电量指令映照组的取值范围进行匹配,以生成对应的电量执行指令组;电量执行指令组包括充电备案指令、前往充电指令;
4、所述充电桩评估模块用于获取智能充电桩对巡检机器人进行充电时的充电相关信息,将智能充电桩的开始充电时刻标记为第一时刻,将其结束充电时刻标记为第二时刻;将第一时刻与第二时刻之间的时间区域标记为充电时区;获取所有充电时区内的充电相关信息将其标记为历史充电信息;对智能充电桩的历史充电信息进行充电质量评估分析,得到智能充电桩的充电质量值;
5、所述充电方案析处模块用于接收充电备案指令后对充电桩位置信息进行备案分析,提取智能充电桩的所在位置,并利用高精度定位系统获取巡检机器人的当前位置,将巡检机器人的当前位置与智能充电桩的所在位置输入到导航析处模块中,由导航析处模块使用地图数据和路径规划算法来生成巡检机器人的充电前往路线及路线距离、路线到达预计时长;将巡检机器人的充电前往路线及路线距离、路线到达预计时长标记为预计充电方案;
6、所述充电桩选取模块用于接收充电备案指令后对智能充电桩的工作状态、充电质量值和预计充电方案进行融合选取分析,以得到选取充电桩,具体分析如下:
7、获取智能充电桩的工作状态,工作状态包括充电状态、闲置状态;若存在闲置状态的智能充电桩,提取所有处于闲置状态的智能充电桩的预计充电方案中的路线距离、路线到达预计时长,将路线距离与路线到达预计时长进行加权计算,得到路线值;
8、若存在充电状态的智能充电桩,提取该智能充电桩的充电效率、充电功率以及正在充电巡检机器人的电池电量,获取该电池电量的电量满值阈值,将电量满值阈值减去电池电量得到待充电池电量,提取智能充电桩的充电质量值作为充电效率的矫偏系数,对待充电池电量、充电效率进行剩余充电时间预测计算,得到巡检机器人的剩余充电时长;提取预计充电方案中的路线到达预计时长,将路线预计到达时长减去剩余充电时长得到实际等待时长;
9、将路线值、充电质量值、实际等待时长进行加权计算,以得到智能充电桩的选定值;选取最小选定值所对应的智能充电桩作为选定充电桩;
10、所述导航析处模块内预置有充电桩位置信息,包含有该巡检机器人所对应的若干个智能充电桩的所在位置;还用于接收前往充电指令、选定充电桩的预计充电方案,在接收前往充电指令后,中断当前巡逻任务,控制巡检机器人依据选定充电桩的预计充电方案中的充电前往路线前往选定充电桩的位置处,以进行充电操作。
11、作为优选的,对所述智能充电桩的历史充电信息进行充电质量评估分析,得到智能充电桩的充电质量值,具体如下:
12、提取智能充电桩进行充电操作所对应充电时区内的充电相关信息,充电相关信息包括充电电流、充电电压、充电时间、充电效率、充电温度;建立充电评估坐标系,按照采集时刻将充电相关信息内的参数输入到充电评估坐标系中,将对应参数在充电评估坐标系中的位置标记为对应参数点,连接相邻的对应参数点得到参数线,计算对应参数线的斜率,若斜率为正值时,则将该斜率标记为斜率一,若斜率为负值时,则将该斜率标记为斜率二;分别将所有的斜率一、斜率二进行求和计算得到斜总值一、斜总值二,将斜总值一、斜总值二进行加权并求和计算得到波动值;设定对应参数线的正常阈值,将不处于其正常阈值的斜率标记为高变化斜率,将所有的高变化斜率进行加权计算得到异常值;
13、将充电相关信息中的参数进行计算,得到该次智能充电桩充电的运行评估值;
14、将智能充电桩的总充电次数标记为m,按照时间顺序对充电次数进行编号标记为m;提取智能充电桩充电次数对应的运行评估值,将其进行加权计算,利用公式得到智能充电桩的充电质量值na;其中,ma表示充电次数编号为m时所对应的运行评估值,ma表示充电次数为m时运行评估值所对应的权重比例系数。
15、作为优选的,所述巡检机器人在生成前往充电指令时,将其选定充电桩标记为预占用充电桩;设定其它巡检机器人排除预占用充电桩作为可选项。
16、作为优选的,本发明还包括充电反馈模块;
17、所述充电反馈模块用于在智能充电桩对巡检机器人进行充电操作时,提取巡检机器人的充电接收信息,包括接收电流、接收电压、电池电量等;对机器人的充电接收信息中进行参照分析,将充电接收信息与充电相关信息内的参数进行匹配,设定其预设匹配误差正常范围,记录超出预设匹配误差正常范围的充电接收信息的参数将其标记为偏离参数,将所有偏离参数标记为异常充电信息;对异常充电信息内的偏离参数进行编号并标记为cg,g表示偏离参数的数值,将异常充电信息内偏离参数的总数标记为f,利用公式以得到智能充电桩对应充电次数所对应的权重比例系数;其中,mcθ表示充电次数为m时偏离参数编号为c时对应数值所对应的权重因子;将智能充电桩对应充电次数所对应的权重比例系数发送到充电桩评估模块。
18、作为优选的,本发明还包括电量指令映照组调整模块;
19、所述电量指令映照组调整模块对巡检机器人设定的电量指令映照组进行调整分析,获取闲置状态的智能充电桩的所在位置,将其所在位置与巡检机器人的当前位置发送到导航析处模块中,由导航析处模块生成充电桩路线距离;将所有充电桩的路线距离求和均值计算,得到路线均值;提取巡检机器人的行走额定耗能;将路线均值、行走额定耗能进行加权计算,以得到电量指令映照组取值范围的调校系数;由该调校系数对电量指令映照组的取值范围进行调整。
20、与现有技术相比,本发明的有益效果:
21、1、本发明通过充电桩评估模块,对智能充电桩的历史充电信息进行充电质量评估分析,实现了对充电桩充电质量的准确评估,由充电方案析处模块生成预计充电方案,再由充电桩选取模块结合智能充电桩的工作状态、充电质量值和预计充电方案,得到选定值,依据选定值选取最佳的智能充电桩作为选定充电桩,确保巡检机器人选择适合的充电桩进行充电,实现巡检机器人的高效充电和系统的可靠运行。
22、2、本发明通过充电反馈模块允许充电桩评估模块根据历史充电信息对不同充电次数与其对应的充电接收信息进行参照,并由此得到智能充电桩对应充电次数所对应的权重比例系数,从而更准确和全面地评估充电桩的性能并作出相应调整。
23、综上所述,本发明可以优化对巡检机器人的电池电量管理,实现自主充电功能,可以提高工作效率、连续性和灵活性,实现自动化管理和优化,从而提升巡检机器人的整体性能和应用价值。
- 还没有人留言评论。精彩留言会获得点赞!