一种永磁同步电机V/F控制系统及其控制方法与流程
本发明涉及电机控制,更具体的说是涉及一种永磁同步电机v/f控制系统及其控制方法。
背景技术:
1、因永磁同步电机具备功率密度大、运行效率高、结构简单、可靠性高的特点,其应用领域不断扩大。永磁同步电机v/f控制方式算法简单,不需要检测电机转速/位置,可采用较为便宜的硬件实现电机驱动,在风机、水泵等领域得到广泛应用。但是,目前对永磁同步电机v/f控制方法是基于电机稳态模型开发的方法,运行效率受负载影响。此外,永磁同步电机v/f控制方法属于转速、电流开环控制方法,稳定运行能力较差,稳定运行调节工作量较大。
2、因此,如何确保永磁同步电机的高效、稳定运行是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种永磁同步电机v/f控制系统及其控制方法,可实现对永磁同步电机的高效、稳定运行。
2、为了实现上述目的,本发明采用如下技术方案:
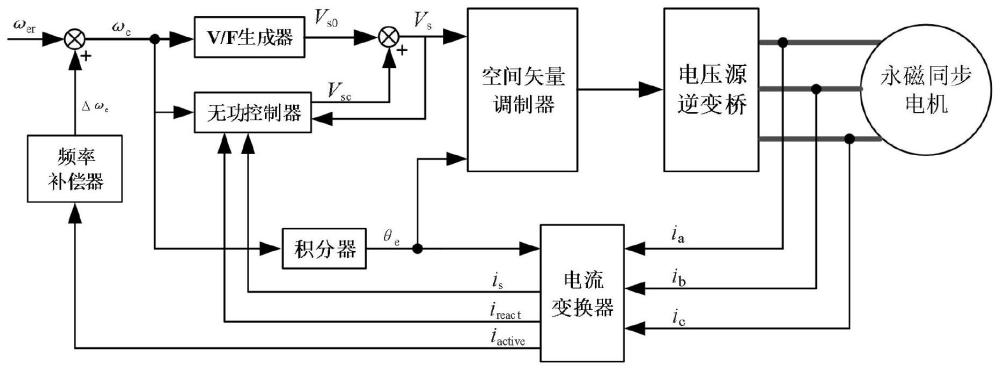
3、第一方面,本发明提供一种永磁同步电机v/f控制系统,包括:电流变换器、补偿单元、空间矢量调制器和电压源逆变桥,所述电压源逆变器的输出端与永磁同步电机的输入端连接;
4、所述电流变换器的输入端与所述电压源逆变桥的输出端连接,用于根据永磁同步电机的电压矢量角度将三相电流变换为电流幅值、有功电流和无功电流;
5、所述补偿单元的输入端与所述电流变换器的输出端连接,用于根据永磁同步电机的电流幅值、有功电流和无功电流的数值变化,计算永磁同步电机运行频率和电压矢量幅值的补偿值,根据补偿值计算电压矢量的幅值和角度;
6、所述空间矢量调制器的输入端与所述补偿单元的输出端连接,用于对电压矢量的幅值和角度进行空间电压矢量调制,生成电压源逆变桥各桥臂的通断顺序和时间的调制信号;
7、所述电压源逆变桥的输入端与所述空间矢量调制器的输出端连接,用于在调制信号的控制下实现各桥臂的通断,并将直流电压逆变为三相交流电压,驱动永磁同步电机输出预定的转速和转矩。
8、进一步的,所述补偿单元包括:频率补偿器、v/f生成器、无功控制器和积分器;
9、所述频率补偿器输入端与所述电流变换器的有功电流输出端连接,用于根据有功电流值计算永磁同步电机运行频率的补偿值;
10、所述v/f生成器输入端分别与上位机输出端和所述频率补偿器输出端连接,用于根据上位机输出的给定电机运行频率与频率补偿器输出的补偿值之和,计算电压幅值的基本值;
11、所述无功控制器输入端分别与所述v/f生成器输入端、所述空间矢量调制器的电压输入端、所述电流变换器的电流幅值输出端和所述电流变换器的无功电流输出端连接,用于根据上位机输出的给定电机运行频率与所述频率补偿器输出的补偿值之和、电流幅值、无功电流值和电压幅值,计算电压幅值的补偿值,再根据电压幅值的基本值和补偿值,计算电压矢量的幅值;
12、所述积分器的输入端分别与上位机输出端和所述频率补偿器输出端连接,用于对上位机输出的给定电机运行频率与频率补偿器输出的补偿值之和进行积分运算,得到电压矢量角度;
13、所述v/f生成器输出端、所述无功控制器输出端和所述积分器输出端均与所述空间矢量调制器的输入端连接。
14、进一步的,所述无功控制器包括:pi控制器、电压限幅器和第一低通滤波器;
15、所述pi控制器用于对永磁同步电机的无功功率给定值和无功功率反馈值间的差值进行比例和积分计算,并叠加后,得到电压幅值的补偿值;
16、所述电压限幅器的输入端与所述pi控制器输出端连接,用于对所述pi控制器输出的电压幅值的补偿值进行限幅处理;
17、所述第一低通滤波器的输入端与所述电压限幅器的输出端连接,用于对限幅处理后的补偿值进行低通滤波运算,得到最终的电压幅值补偿值。
18、进一步的,所述频率补偿器包括:第二低通滤波器、比例放大器和频率限幅器;
19、所述第二低通滤波器的输入端与所述电流变换器输出端连接,用于对永磁同步电机的有功电流进行低通滤波处理;
20、所述比例放大器的输入端与所述第二低通滤波器的输出端连接,用于采用放大系数kb对低通滤波处理后的有功电流中的高频分量进行放大,得到电机运行频率的补偿值;
21、所述限幅器的输入端与所述比例放大器的输出端连接,用于对电机运行频率的补偿值进行限幅处理,得到最终的用于控制的频率补偿值。
22、第二方面,本发明提供一种永磁同步电机v/f控制方法,其适用于上述永磁同步电机v/f控制系统,包括以下步骤:
23、获取永磁同步电机的三相电流,根据电压矢量角度将三相电流变换为永磁同步电机的电流幅值、有功电流和无功电流;
24、根据永磁同步电机的电流幅值、有功电流和无功电流的数值变化,计算永磁同步电机运行频率和电压矢量幅值的补偿值,根据补偿值计算电压矢量的幅值和角度;
25、对电压矢量的幅值和角度进行空间电压矢量调制,生成电压源逆变桥各桥臂的通断顺序和时间的调制信号;
26、在调制信号的控制下,对永磁驱动变换母线直流电,并将直流电逆变为三相交流电,驱动永磁同步电机输出预定的转速和转矩。
27、进一步的,电压矢量的幅值和角度的计算过程包括:
28、根据永磁同步电机的有功电流值计算永磁同步电机运行频率的补偿值;
29、根据上位机输出的给定电机运行频率与补偿值之和,计算电压幅值的基本值;
30、根据上位机输出的给定电机运行频率与补偿值之和、电流幅值、无功电流值和电压幅值,计算电压幅值的补偿值,再根据电压幅值的基本值和补偿值,计算电压矢量的幅值;
31、对上位机输出的给定电机运行频率与补偿值之和进行积分运算,得到电压矢量角度。
32、进一步的,电压幅值的补偿值的计算过程包括:
33、对永磁同步电机的无功功率给定值和无功功率反馈值间的差值进行比例和积分计算,并叠加后,得到电压幅值的补偿值;
34、对电压幅值的补偿值进行限幅处理;
35、对限幅处理后的补偿值进行低通滤波运算,得到最终的电压幅值补偿值。
36、进一步的,电机运行频率的补偿值的计算过程包括:
37、对永磁同步电机的有功电流进行低通滤波处理;
38、以放大系数kb对低通滤波处理后的有功电流中的高频分量进行放大,得到电机运行频率的补偿值;
39、对电机运行频率的补偿值进行限幅处理,得到最终的用于控制的频率补偿值。
40、进一步的,对放大系数kb的整定过程包括:
41、根据永磁同步电机的线性化运动方程得到转速与转矩间的传递函数;
42、根据传递函数得到极点方程,并计算极点方程的特征根;
43、根据极点方程的特征根计算放大系数kb的取值范围;
44、在kb的取值范围内选取中间值作为最终的整定值。
45、进一步的,放大系数kb的取值范围为:
46、
47、其中,ke表示矩角系数,kt表示转矩系数,j表示永磁同步电机轴等效转动惯量,p表示永磁同步电机极对数。
48、经由上述的技术方案可知,与现有技术相比,本发明具有以下有益效果:
49、本发明分别根据永磁电机有功电流和无功电流的数值变化提取运行频率和电压矢量幅值的补偿值,根据补偿值计算电机电压矢量的幅值和角度,再根据电压矢量的幅值和角度确定电压源逆变桥各桥臂的通断顺序和时间,进而驱动电机输出预定的转速和转矩,并驱动相应负载实现预定运动,确保永磁电机控制系统运行稳定且效率高。
50、同时,对电机运行频率进行比例放大时,由于比例放大器的比例放大系数对永磁同步电机v/f控制系统性能具有重要影响,传统的比例放大系数,一般需要根据控制系统的表现进行人工试凑而得到。本发明根据永磁同步电机的转动惯量j、摩擦系数b、ke和kt这4个常数物理量,可自动获取频率补偿器放大系数,大大减少了现场人员调试工作量,降低了放大系数整定的难度。
- 还没有人留言评论。精彩留言会获得点赞!