变速调相机控制方法及装置与流程
本发明涉及电力系统,具体而言,涉及一种变速调相机控制方法及装置。
背景技术:
1、我国电网构建复杂,交直流、多直流、送受端相互影响,电网运行特性复杂,控制难度加大,大电网仿真面临严峻考验,同时,在新能源高占比电网中,新能源的特征十分明显,新能源并网安全问题十分严峻,特别是在特高压直流送端近区电网,新能源汇集占比高,集群化明显,电力系统的电压,惯性和一次调频的问题愈发严重,例如2019年8月9日发生的英国大停电,由于某种原因littlebarford小巴德福燃气电站正确停机,损失发电负荷后导致系统频率降低,由于北海电网风机耐受低频能力不足,导致风机大量脱网,风电场出力骤降,进而导致系统频率突降,低频减载动作,切除部分负荷导致停电事故。
2、同步调相机可以提供动态无功支撑,提高电网强度从而提升系统稳定运行能力,广泛应用于特高压直流换流站,但是同步调相机的惯量支撑是不可控的,并且也不能参与系统的一次调频。
3、双馈调相机具有同步调相机的功能,同时转速和系统频率解耦,通过控制其转子的交流励磁电压和频率,可以实现有功功率和无功功率的独立控制,进而对系统的电压和频率进行调节。其中,双馈调相机主要通过变速调相机进行上述调节,而目前变速调相机的控制存在如下问题:
4、(1)变速调相机q轴为定电压控制策略,然而目前根据现场要求,变速调相机稳态时应跟随上级调度自动电压控制(avc)下发的无功指令,当前控制无法跟随avc控制指令,如若q轴改成定无功控制策略,则无法在系统电压突变的时候提供快速的电压支撑;
5、(2)变速调相机d轴为定转速控制策略,然而系统在频率扰动时候需求的是有功功率,有功功率和转速呈现高次非线性关系,难以直接控制。
技术实现思路
1、鉴于此,本发明提出了一种变速调相机控制方法及装置,旨在解决现有变速调相机无法在系统电压突变的时候提供快速的电压支撑以及系统在频率扰动时候需求的是有功功率时难以直接控制的问题。
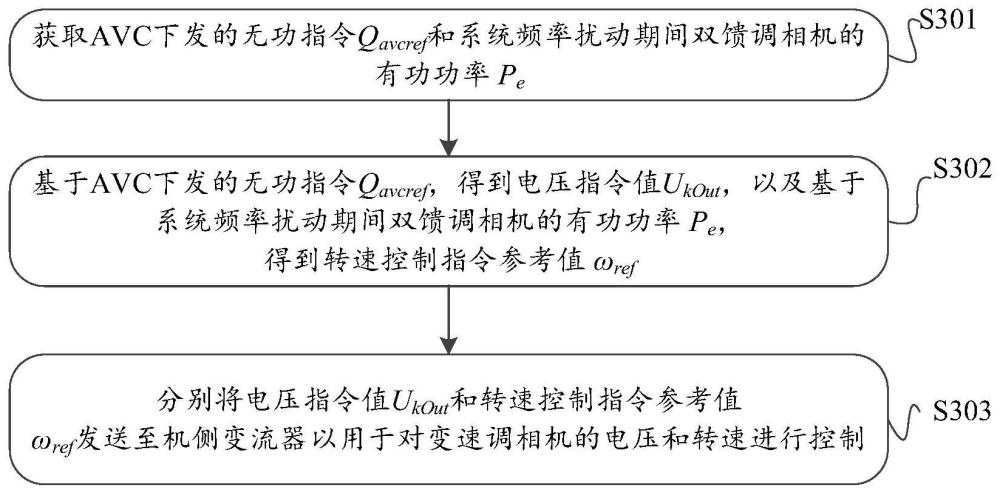
2、第一方面,本发明实施例提供了一种变速调相机控制方法,应用于主控制器,包括:获取avc下发的无功指令qavcref和系统频率扰动期间双馈调相机的有功功率pe,其中,所述avc下发的无功指令qavcref和系统频率扰动期间双馈调相机的有功功率pe受到总视在功率sn限制;基于所述avc下发的无功指令qavcref,得到电压指令值ukout,以及基于所述系统频率扰动期间双馈调相机的有功功率pe,得到转速控制指令参考值ωref;分别将所述电压指令值ukout和所述转速控制指令参考值ωref发送至机侧变流器以用于对变速调相机的电压和转速进行控制。
3、进一步地,所述avc下发的无功指令qavcref和系统频率扰动期间双馈调相机的有功功率pe受到总视在功率sn限制,包括:
4、
5、其中,qavcref为avc下发的无功指令,pe为系统频率扰动期间双馈调相机的有功功率,sn为总视在功率。
6、进一步地,基于所述avc下发的无功指令qavcref,得到电压指令值ukout,包括:根据所述avc下发的无功指令qavcref、变速调相机无功功率的差值qs和变速调相机的机端电压参考值usref,得到第一结果;根据所述第一结果和变速调相机的机端电压us,得到vavr;将vavr和变速调相机的机端电压参考值usref进行叠加,得到电压指令值ukout。
7、进一步地,根据所述avc下发的无功指令qavcref、变速调相机无功功率的差值qs和变速调相机的机端电压参考值usref,得到第一结果,包括:将所述avc下发的无功指令qavcref和变速调相机无功功率的差值qs叠加后进行pid计算,并将pid计算结果与变速调相机的机端电压参考值usref进行叠加,得到第一结果。
8、进一步地,根据所述第一结果和变速调相机的机端电压us,得到vavr,包括:将所述第一结果与变速调相机的机端电压us叠加后进行pid计算,得到vavr。
9、进一步地,获取系统频率扰动期间双馈调相机的有功功率pe,包括:采用如下方式确定系统频率扰动期间双馈调相机的有功功率pe:
10、
11、其中,δf为系统频率偏差,df/dt为系统频率变化率,k1为一次调频系数,k2是惯量系数。
12、进一步地,基于所述系统频率扰动期间双馈调相机的有功功率pe,得到转速控制指令参考值ωref,包括:将所述系统频率扰动期间双馈调相机的有功功率pe的计算公式代入发电机组转子运动方程,得到故障后的转子转速计算公式如下所示:
13、
14、其中,ω0为故障前的转子转速,δf为系统频率偏差,df/dt为系统频率变化率,k1为一次调频系数,k2是惯量系数,j为转子惯性时间常数;基于所述故障后的转子转速计算公式,对系统频率f进行迭代处理,得到当前控制周期的转速控制指令参考值如下:
15、
16、其中,ω(n-1)为上一控制周期的转子转速,δf(n)为当前控制周期的系统频率偏差,fn为当前控制周期的系统频率,fn-1为上一控制周期的系统频率,δt表示控制周期,k1为一次调频系数,k2是惯量系数,j为转子惯性时间常数。
17、第二方面,本发明实施例还提供了一种变速调相机控制装置,应用于主控制器,包括:获取单元,用于获取avc下发的无功指令qavcref和系统频率扰动期间双馈调相机的有功功率pe,其中,所述avc下发的无功指令qavcref和系统频率扰动期间双馈调相机的有功功率pe受到总视在功率sn限制;处理单元,用于基于所述avc下发的无功指令qavcref,得到电压指令值ukout,以及基于所述系统频率扰动期间双馈调相机的有功功率pe,得到转速控制指令参考值ωref;控制单元,用于分别将所述电压指令值ukout和所述转速控制指令参考值ωref发送至机侧变流器以用于对变速调相机的电压和转速进行控制。
18、进一步地,所述avc下发的无功指令qavcref和系统频率扰动期间双馈调相机的有功功率pe受到总视在功率sn限制,包括:
19、
20、其中,qavcref为avc下发的无功指令,pe为系统频率扰动期间双馈调相机的有功功率,sn为总视在功率。
21、进一步地,基于所述avc下发的无功指令qavcref,得到电压指令值ukout,包括:根据所述avc下发的无功指令qavcref、变速调相机无功功率的差值qs和变速调相机的机端电压参考值usref,得到第一结果;根据所述第一结果和变速调相机的机端电压us,得到vavr;将vavr和变速调相机的机端电压参考值usref进行叠加,得到电压指令值ukout。
22、进一步地,根据所述avc下发的无功指令qavcref、变速调相机无功功率的差值qs和变速调相机的机端电压参考值usref,得到第一结果,包括:将所述avc下发的无功指令qavcref和变速调相机无功功率的差值qs叠加后进行pid计算,并将pid计算结果与变速调相机的机端电压参考值usref进行叠加,得到第一结果。
23、进一步地,根据所述第一结果和变速调相机的机端电压us,得到vavr,包括:将所述第一结果与变速调相机的机端电压us叠加后进行pid计算,得到vavr。
24、进一步地,获取系统频率扰动期间双馈调相机的有功功率pe,包括:采用如下方式确定系统频率扰动期间双馈调相机的有功功率pe:
25、
26、其中,δf为系统频率偏差,df/dt为系统频率变化率,k1为一次调频系数,k2是惯量系数。
27、进一步地,基于所述系统频率扰动期间双馈调相机的有功功率pe,得到转速控制指令参考值ωref,包括:将所述系统频率扰动期间双馈调相机的有功功率pe的计算公式代入发电机组转子运动方程,得到故障后的转子转速计算公式如下所示:
28、
29、其中,ω0为故障前的转子转速,δf为系统频率偏差,df/dt为系统频率变化率,k1为一次调频系数,k2是惯量系数,j为转子惯性时间常数;基于所述故障后的转子转速计算公式,对系统频率f进行迭代处理,得到当前控制周期的转速控制指令参考值如下:
30、
31、其中,ω(n-1)为上一控制周期的转子转速,δf(n)为当前控制周期的系统频率偏差,fn为当前控制周期的系统频率,fn-1为上一控制周期的系统频率,δt表示控制周期,k1为一次调频系数,k2是惯量系数,j为转子惯性时间常数。
32、第三方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时,实现上述各实施例提供的变速调相机控制方法。
33、第四方面,本发明实施例还提供了一种电子设备,包括:处理器;用于存储所述处理器可执行指令的存储器;所述处理器,用于从所述存储器中读取所述可执行指令,并执行所述可执行指令以实现上述各实施例提供的变速调相机控制方法。
34、本发明实施例提供的变速调相机控制方法及装置,基于avc下发的无功指令qavcref,得到电压指令值ukout,以及基于系统频率扰动期间双馈调相机的有功功率pe,得到转速控制指令参考值ωref,并分别将电压指令值ukout和转速控制指令参考值ωref发送至机侧变流器以用于对变速调相机的电压和转速进行控制,实现了变速调相机q轴稳态跟随avc下发无功控制策略,暂态是能够提供快速的电压支撑,以及实现了变速调相机d轴在定转速控制策略下,定有功控制。
- 还没有人留言评论。精彩留言会获得点赞!