基于曲线预测的超磁致伸缩致动器控制系统
本发明涉及天文望远镜的自适应光学系统,具体涉及自适应光学系统中自适应变形镜的超磁致伸缩致动器控制系统。
背景技术:
1、自适应光学系统是能够自动调整光学系统来降低大气湍流对成像影响的技术,能提高大型天文望远镜的成像质量,其中用于驱动自适应变形镜的控制器是自适应光学系统的重要组成部分,对自适应光学系统的校正效果有重要影响。
2、自上世纪六七十年代,美国首先开始研究自适应光学技术,至上世纪七八十年代,中国与欧洲其他国家也开始发展自适应光学技术,中国科学院光电技术研究所是我国最早一批开展自适应光学研究的研究所。目前国内外主流的自适应变形镜致动器包括音圈致动器、压电陶瓷致动器和超磁致伸缩致动器,其中音圈致动器已经在欧洲甚大望远镜及美国大型双筒望远镜得到了应用,而国内对压电陶瓷致动器的研究也比较深入。而超磁致伸缩致动器现在应用较少,但其具有能量转换率高,变形伸缩量大,响应速度快等优点,同样适用于自适应变形镜的驱动,
3、超磁致伸缩致动器是基于磁致伸缩效应的驱动器,具有磁滞效应,通常可以通过建立preisach模型进行补偿控制,preisach模型是一种与迟滞机理无关的实验数据模型,但存在控制精度低、实验数据采集量大、模型对已知数据利用率低、模型输出易受采集误差量影响的缺点。另外,preisach模型是依赖采集数据实现的模型,大量的采集点使得编写的控制程序庞大复杂,占用了过多的硬件资源,影响了控制系统的运行速度,而控制速度对自适应变形镜的控制至关重要。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种模型实现难度低、控制效果好且占用硬件资源低的超磁致伸缩致动器的控制系统,该系统采用的曲线预测控制算法以preisach模型建立所需的一阶回转曲线为基础,建立整合位移表格,通过曲线拟合与在线插值相结合的控制策略实现超磁致伸缩致动器的控制。在控制算法实现的过程中,先通过实验、离线计算来获取各回转点处的拟合曲线的各参数值,在控制程序运行时,只需对已知参数进行线性插值即可获得当前回转点时的超磁致伸缩致动器位移预测曲线。相较于传统实验数据模型,本方法既减少了建立模型所需要的数据量,也提高了单个预测值对整体已知数据的利用率,实现了更高的预测可靠性及预测精度,还大大降低了对硬件资源的占用、实现了更快的运行速度、减小了程序编写的复杂度。
2、为实现本发明的目的,本发明通过以下技术方案实现:一种基于曲线预测的超磁致伸缩致动器控制系统及控制方法,包括超磁致伸缩致动器、电容式传感器、功率放大器、控制器、上位机。
3、所述上位机用于下发位置指令给控制器。所述电容式传感器用于检测超磁致伸缩致动器位置信息并将信息传递给控制器。所述控制器根据上位机位置指令、电容式传感器检测的超磁致伸缩致动器位置信息,利用控制算法计算控制输出。所述功率放大器接收控制器电压输出信号并输出电流控制信号至超磁致伸缩致动器。所述超磁致伸缩致动器与功率放大器相连并最终实现位移输出。
4、进一步的,所述超磁致伸缩致动器的变形是根据功率放大器输出电流使内部线圈产生磁场,并使超磁致伸缩材料杆产生变形实现的。
5、进一步的,所述基于曲线预测的超磁致伸缩致动器控制方法是以一阶回转曲线为基础、结合了离线曲线拟合及实时参数线性插值的闭环负反馈控制算法。
6、进一步的,所述控制算法的实现过程包括实验数据采集、离线计算、实时控制三部分。
7、进一步的,所述实验数据采集部分是一阶回转曲线的采集。
8、进一步的,所述离线计算部分包括整合位移表格搭建、拟合位移曲线、获取离线参数。
9、进一步的,所述实时控制部分包括控制算法实现、控制系统实时控制。
10、进一步的,所述一阶回转曲线由实验得出,通过对超磁致伸缩致动器施加电压激励的方式获得其位置轨迹与电压轨迹的关系。电压设为横坐标,正向电压激励时横坐标为α轴,反方向电压激励时横坐标为β轴,纵坐标为超磁致伸缩致动器位置,记做x(α,β),α、β的下标表示不同电压位置,实验开始先以超磁致伸缩致动器位移负饱和的(α0,β0)为初始点,正向激励至某(αn,βn)(n=0,1,…,n),再反向激励至(αn,β0),其中(αn,βn)称此回转点,回转点处αn=βn,在反向激励时,记录所有的超磁致伸缩致动器位置输出x(αn,βn-m)(m=0,1,…,n),反向激励曲线上所有的输出x(αn,βn-m)的集合称为在回转点(αn,βn)下的一阶回转曲线。
11、进一步的,所述整合位移表格由离线计算得出,整合位移表格是为了获取拟合曲线存在的,代表了各回转点(αn,βn)下超磁致伸缩致动器的电压变化量与位移变化量的关系表。建立整合位移表格首先要以各回转点(αn,βn)的位置量x(αn,βn)为基准,分别计算各一阶回转曲线在激励至各采样点(αn,βn-m)时的相对位移量g(αn,βn-m)、电压变化量δv,g(αn,βn-m)与δv由下面表达式确定,
12、
13、再将g(αn,βn-m)先按对应的回转点电压αn归类,再按照电压变化量δv排序,按此规律整合所有一阶回转曲线并将g(αn,βn-m)按照各自的αn、δv置于表格内即可得整合位移表格。
14、进一步的,所述离线曲线拟合是指在整合位移表格的每一个采样回转点电压αn处,都将其对应的每组相对位移量g(αn,βn-m)与电压变化量δv分别作为因变量x与自变量y,通过二次曲线拟合得曲线y=ax2+bx+c,记录此回转点电压αn、曲线的二次项系数a、一次项系数b与常数项系数c,拟合方法是通过最小二乘法寻找最佳参数,以此可求得各回转点时的拟合曲线参数a、b、c。最佳参数的可由下列公式确定。
15、
16、式中,s为目标函数,使其最小的参数便为最佳参数,n为数据的数量。
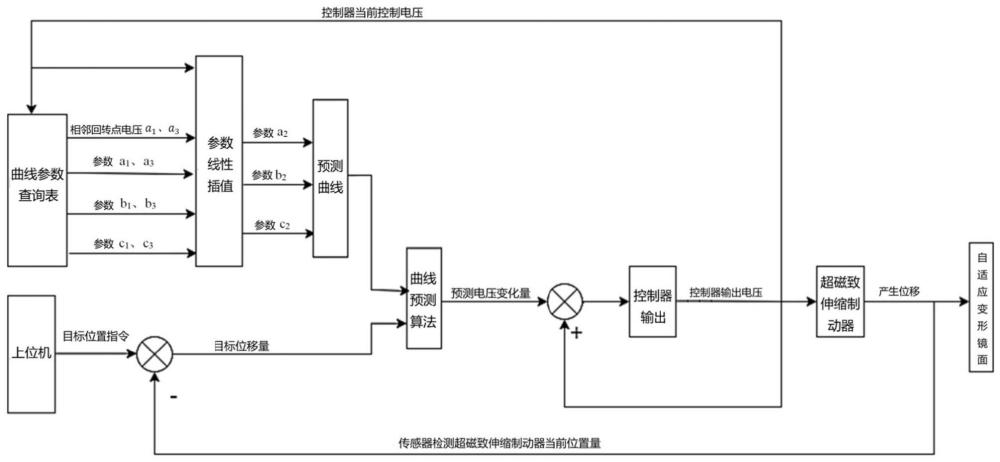
17、进一步的,所述获取离线参数可由制定曲线参数查询表实现,曲线参数查询表由各回转点电压αn、参数an、参数bn、参数cn组成,输入为当前控制电压v,当αk-1<v<αk时,有输出ak、bk、ck,ak-1、bk-1、ck-1,曲线参数查询表的输入为电压值,输出为与之相邻的两回转点电压αk-1、αk处的拟合曲线参数值,共两组,每组三个参数,其中αk-1、αk为两个相邻的一阶回转曲线回转点电压值。
18、进一步的,所述预测位移曲线控制算法的实现所需的输入变量为当前控制电压、目标位移量。其中当前控制电压可由控制器直接读出,目标位移量可由电容式传感器检测的超磁致伸缩致动器当前位置与上位机下达的目标位置指令的差确定。
19、进一步的,所述控制算法的具体实现过程,首先根据当前控制电压,可从相邻曲线参数查询表处获得相邻回转点处的曲线参数,记当前控制电压为v2,相邻两回转点电压为v1、v3,有v1<v2<v3,可根据v1处的曲线参数a1、b1、c1以及v3处的参数a3、b3、c3,预测当前控制电压v2下的超磁致伸缩致动器的位移-电压曲线的参数a2、b2、c2。其中a2、b2、c2可由下列公式得出。
20、
21、进一步的,所述控制算法的输出为电压变化量δx,由目标位移量δy与预测曲线y=ax2+bx+c得出,将目标位移量δy带入y,即可计算出所需的电压变化量δx。
22、进一步的,单次控制中,控制器最终输出的控制电压为当前控制电压v与电压变化量δx的和。
23、进一步的,单次控制完成后,重复以上步骤,实现超磁致伸缩致动器的闭环控制。
24、本发明的有益效果为:
25、1)本发明采用预测运动曲线的方式对超磁致伸缩致动器进行控制,通过建立实验数据模型的方式对其磁滞效应进行了补偿,使其能适用于自适应变形镜的镜面变形,实现较好的控制精度及控制速度。
26、2)本发明采用曲线拟合的方式建立预测模型,大大减少了建立传统preisach所需要的实验数据量,降低了迟滞补偿模型建立的难度及复杂度,同时通过参数线性插值的方式使模型具有一定的自调节能力。
27、3)本发明采用预测曲线的方法代替传统preisach模型的经典插值法,提高了预测模型对原始采集数据的利用率,在单次预测中,曲线拟合预测模型利用了两条完整的一阶回转曲线的全部数据,提高了算法的控制精度及算法可靠性。
28、4)本发明采用曲线拟合处理一阶回转曲线数据,减小了单个数据采集误差对局部模型计算精度的不利影响,使实验数据模型更加可靠。
29、5)本发明采用离线计算与在线参数插值的控制策略,简化了控制算法的计算过程,同时降低了程序的运算量,减少了对硬件资源的占用,提高了控制速度,以满足自适应变形镜所需的快速控制要求。
- 还没有人留言评论。精彩留言会获得点赞!