三相六线直流无刷电机差放驱动方法、系统、介质和设备与流程
本技术涉及电机驱动,尤其涉及一种三相六线直流无刷电机差放驱动方法和系统。
背景技术:
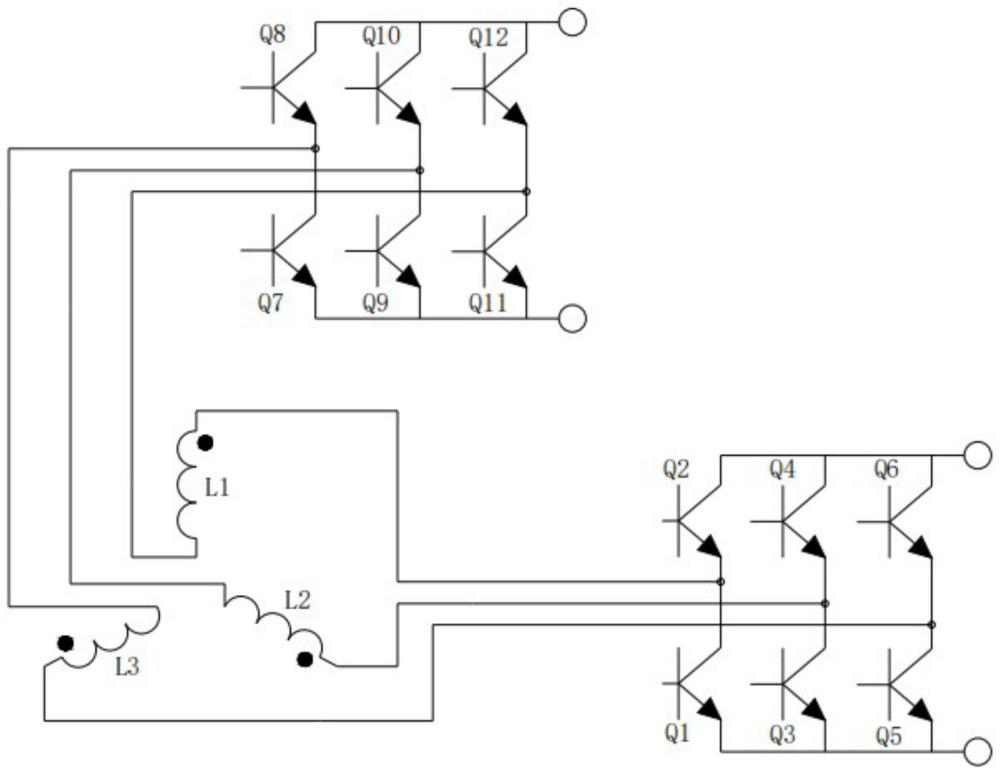
1、传统三相直流电机通常用三个半桥来驱动,其线圈一般采用星型接法,如图1所示,三个线圈具有一个公共端点,这种传统的接法会造成更多的功耗和噪音。现有技术中,也出现了三线接法,三个相线圈绕组不再具有公共端点,而是三组相线圈绕组的两端分别与驱动相连,驱动也从传统的半桥改为全桥,例如本技术发明人的在先申请:cn107994814a、cn110557060a、cn116614024a。
2、但三线接法也存在自身的问题,例如,在三线接法下,电机的电流路径相对于传统的星形接法来说更为复杂。在三线接法中,每个相位的线圈的两端都与驱动器相连,而不再有一个共同的连接点。这意味着电流必须从一个端口流入线圈,然后从另一个端口流出,而不是像星形接法那样,从一个共同的连接点流入所有线圈。这种连接方式使得在低速和静止状态下的启动变得更为复杂。在低速和静止状态下,电机启动时需要产生较大的起动力矩以克服静摩擦力和惯性,但静摩擦力和惯性是动态的。传统的星形接法下,电流路径相对简单,可以较容易地产生足够的起动力矩,但没有太好的解决启动时动态平衡的办法。但在三线接法下,电流路径虽然变得更为复杂,但提供了更好地平衡电机启动时动态特性的可能。因此,有必要提供一种适应三线接法的电流路径以在低速和静止状态下提供足够启动力矩且平滑适应电机的动态特性的三相六线直流无刷电机差放驱动方法。
3、申请内容
4、本技术的目的在于提供一种适应三线接法的电流路径以在低速和静止状态下提供足够启动力矩且平滑适应电机的动态特性的三相六线直流无刷电机差放驱动方法。
5、根据本技术的一方面,提供一种三相六线直流无刷电机差放驱动方法,所述电机包括:三组不同相位的线圈、与每组线圈的两端分别电连接以分别驱动三组线圈的全桥驱动,以及连通三组线圈与全桥驱动的三条电流路径,所述方法包括步骤:
6、初始阶段:三条电流路径的初始电流初始值依次设置为i1、i2和i3,其中,i1、i2和i3为与电机运行状态的额定电流相关的变量,且i1、i2和i3之间并非线性相关,以改善电机启动的动态平衡性;
7、增加电流:三条电流路径的电流值依次分步增加,三条电流路径单位时间内的电流值增加量记为与i1对应的变量k1、与i2对应的变量k2和与i3对应的变量k3,其中,k1、k2和k3依次递增,且k1、k2和k3之间并非线性相关,以逐步提高电机的转矩;
8、检测启动:监测电机的转速v,一旦达到足够的启动转速vst,则停止增加电流并转入运行状态。
9、更优地,在初始阶段:
10、电机运行状态的额定电流记为ie,满足关系式:
11、i1=r×ie;
12、其中r是一个满足0.1≤r≤0.2的比例系数,以避免电机在启动时施加的电流太大造成冲击。
13、更优地,在初始阶段:
14、i1、i2和i3之间满足关系式:
15、in=i1+c×sin(k×n);
16、其中,in是第n条路径的初始电流值,n=2或3,i1是确定的初始值,c是一个常数,表示初始值的偏移量,k是一个常数,控制正弦函数的周期,使得不同的电流路径产生不同的转矩,以平衡电机的动态特性。
17、更优地,在增加电流阶段:
18、任一电流路径单位时间内的电流值增加量记kn,n=1、2或3,且满足关系式:
19、kn=a×log(n+b);
20、0.1<a<10;
21、0<b<10;
22、其中,a为控制电流增长速率的系数,b为控制电流初始增长速度的偏移量。
23、一种三相六线直流无刷电机差放驱动系统,所述电机包括:三组不同相位的线圈、与每组线圈的两端分别电连接以分别驱动三组线圈的全桥驱动,以及连通三组线圈与全桥驱动的三条电流路径,所述系统包括:
24、初始电流控制模块,与全桥驱动相连,且三条电流路径的初始电流初始值依次设置为i1、i2和i3,其中,i1、i2和i3为与电机运行状态的额定电流相关的变量,且i1、i2和i3之间并非线性相关,以改善电机启动的动态平衡性;
25、启动电流递增模块,与全桥驱动相连,且三条电流路径的电流值依次分步增加,三条电流路径单位时间内的电流值增加量记为与i1对应的变量k1、与i2对应的变量k2和与i3对应的变量k3,其中,k1、k2和k3依次递增,且k1、k2和k3之间并非线性相关,以逐步提高电机的转矩;
26、启动转速检测模块:分别与三条电流路径和全桥驱动相连,且监测电机的转速v,一旦达到足够的启动转速vst,则停止增加电流并转入运行状态。
27、更优地,在初始阶段:
28、电机运行状态的额定电流记为ie,满足关系式:
29、i1=r×ie;
30、其中r是一个满足0.1≤r≤0.2的比例系数,以避免电机在启动时施加的电流太大造成冲击。
31、更优地,在初始阶段:
32、i1、i2和i3之间满足关系式:
33、in=i1+c×sin(k×n);
34、其中,in是第n条路径的初始电流值,n=2或3,i1是确定的初始值,c是一个常数,表示初始值的偏移量,k是一个常数,控制正弦函数的周期,使得不同的电流路径产生不同的转矩,以平衡电机的动态特性。
35、更优地,在增加电流阶段:
36、任一电流路径单位时间内的电流值增加量记kn,n=1、2或3,且满足关系式:
37、kn=a×log(n+b);
38、0.1<a<10;
39、0<b<10;
40、其中,a为控制电流增长速率的系数,b为控制电流初始增长速度的偏移量。
41、一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行所述方法的步骤。
42、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行所述方法的步骤。
43、本技术具有如下有益效果:
44、1、通过将电机的启动过程分为初始阶段、增加电流阶段以及检测阶段,先给初始电流一个较小值,避免三条路径的电流过大造成冲击,再通过增加电流阶段逐步调高电流至满足启动转速的电流值。
45、2、在这一过程中,为了改善电机启动的动态平衡,在初始阶段,三条电路路径的电流初始值i1、i2和i3为与电机运行状态的额定电流相关的变量,且i1、i2和i3之间并非线性相关,用户可以根据具体情况调整电流初始值,使得电机在启动时能够更加灵活地调整输出力矩,从而实现更加平稳和有效的启动过程,从而改善电机启动的动态平衡性;
46、3、在增加电流阶段,三条电流路径的电流值依次分步增加,且三条电流路径单位时间内的电流值增加量k1、k2和k3依次递增,且k1、k2和k3之间并非线性相关,这意味着,电流的增加不是以某个电流值为目标,当检测到电机的转速达到启动转速vst时,三条电流路径的电流值也是非线性关系,可以有效改善电机的动态平衡。
技术实现思路
- 还没有人留言评论。精彩留言会获得点赞!