一种基于三相DC-DC变换器的热平衡方法
本发明涉及三相dc-dc变换器领域,具体涉及一种基于三相dc-dc变换器的热平衡方法。
背景技术:
1、传统的单相dab变换器,控制方式非常灵活,常见的控制方法有单移相(singlephase shift,sps)控制、扩展移相(extend phase shift,eps)控制、双重移相(doublephase shift,dps)控制、三重移相(triple phase shift,tps)控制和五自由度(fivedegree of freedom,5-dof)控制等。通过对控制策略的优化可以实现dab变换器中开关器件的零电压开通,同时减小器件中的电流有效值,使dab变换器拥有较高的传输效率。近几年随着开关器件的进一步发展,使得dab变换器的开关频率和功率密度进一步提升。由此,dab变换器被广泛应用于光伏储能电站及电动汽车领域。将dab的原副桥臂都加入一个新的半桥,变压器改用三相变压器即可得到三相dc-dc(3p-dab)变换器。相比于单相dc-dc(1p-dab)变换器,3p-dab加入新的桥臂,由于新的桥臂分担了另外两个桥臂的电流,从而使得变换器具有传输更大功率的能力。同样,3p-dab也可以利用变压器的漏感实现zvs,无需添加额外的谐振元件。原副边的对称结构可以使变换器实现模块化,也有利于实现双向运行。与单相dab不同的是,三相交错并联结构可以等效为三倍的开关频率,可以有效减小输入和输出的纹波,从而减小滤波器的体积,提升输出电压电流质量。
2、文献1“optimized modulation and dynamic control of a three-phase dualactive bridge converter with variableduty cycles,ieee trans.power electron.,vol.34,no.3,pp.2856-2873,mar.2019,doi:10.1109/tpel.2018.2842021.”(“具有可变占空比的三相双有源桥式转换器的优化调制和动态控制”)将不同的占空比应用于原副边的桥臂上,形成了三自由度控制方案,但是没有考虑到因为占空比不同而导致的开关管热不平衡问题。
3、文献2“optimal simultaneous pwm control for three-phase dual-active-bridge converters to minimize current stress in the whole load range,in ieeejournal of emerging and selected topics in power electronics,vol.9,no.5,pp.5822-5837,oct.2021”(“优化三相双主动桥式转换器的同步pwm控制,以最大限度降低整个负载范围内的电流应力”)同样采用原副边占空比不同的三自由度方案,以电流应力为优化目标进行优化计算,进一步提升了变换器的传输效率,但是没有考虑到因为占空比不同而导致的开关管热不平衡问题。
4、中国发明专利公开说明书(cn107070241a)公开了一种原、副边为两个全桥的双向dc-dc系统及其热平衡的方法,该发明针对该系统提出了一种调制策略,但所提的优化调制策略仅适用于该全桥的拓扑结构,随着传输功率的进一步增大,对输出电压电流质量的要求进一步提高,该拓扑的应用场合受到限制,适用于更高功率等级的三相dc-dc变换器需要被推广。
5、综上所述,现有技术还存在以下问题:
6、1、很多文献只考虑了对三相dc-dc变换器的效率优化方法,但是并未考虑到不同开关管的损耗情况不一致,从而导致的热不平衡现象,依然限制变换器的传输效率;
7、2、对于单相dc-dc变换器,尚有一些有关热平衡优化方法,但是还没有学者对三相dc-dc变换器的热平衡做出研究。
8、3、现有技术中dab变换器的三自由度不对称控制方式下开关管并不是各导通半个周期,这会导致开关管的温升差异,而功率开关器件的工作温度影响着器件的性能和使用寿命,因此也影响着变换器的可靠性。
技术实现思路
1、本发明所要解决的技术问题为以上现有技术中存在的问题,具体的,基于三相dc-dc变换器拓扑,在不增加或改动任何硬件的基础上,提出了一种优化方法,该优化方法在dab变换器的三自由度不对称控制方式下,在不改变输出电压电流的前提下,通过交换开关管的导通时间,平衡了开关器件的热损耗,提高整个样机的工作效率。
2、本发明地目的是这样实现的,本发明提供了一种基于三相dc-dc变换器的热平衡方法,所述三相dc-dc变换器系统包括原边侧直流电源、副边侧直流电源和双向dc-dc模块;所述双向dc-dc模块包括原边侧三相半桥电路、原边侧三相电感、原边侧发射线圈、副边侧接收线圈和副边侧三相半桥电路;所述原边侧三相半桥电路并联在原边侧直流电源e1的正负直流母线之间,所述副边侧三相半桥电路并联在副边侧直流电源e2的正负直流母线之间;
3、所述原边侧三相半桥电路包括6个带反向并联二极管及输出电容的开关管spi,i=1,2,…,6;其中,开关管sp1的发射极和开关管sp2的集电极相接组成原边侧a相桥臂,开关管sp3的发射极和开关管sp4的集电极相接组成原边侧b相桥臂,开关管sp5的发射极和开关管sp6的集电极相接组成原边侧c相桥臂,且三个接点构成原边侧三相半桥电路的输出端,该输出端接原边侧三相电感,原边侧三相电感的另一端接原边侧发射线圈;所述副边侧三相半桥电路包括6个带反向并联二极管及输出电容的开关管ssi,其中,开关管ss1的发射极和开关管ss2的集电极相接组成副边侧a相桥臂,开关管ss3的发射极和开关管ss4的集电极相接组成副边侧b相桥臂,开关管ss5的发射极和开关管ss6的集电极相接组成副边侧c相桥臂,且三个接点构成副边侧三相半桥电路的输出端,该副边侧三相半桥电路的输出端接副边接收线圈,副边侧接收线圈通过互感m接收原边侧发射线圈发射的电磁场,并转化为电能;
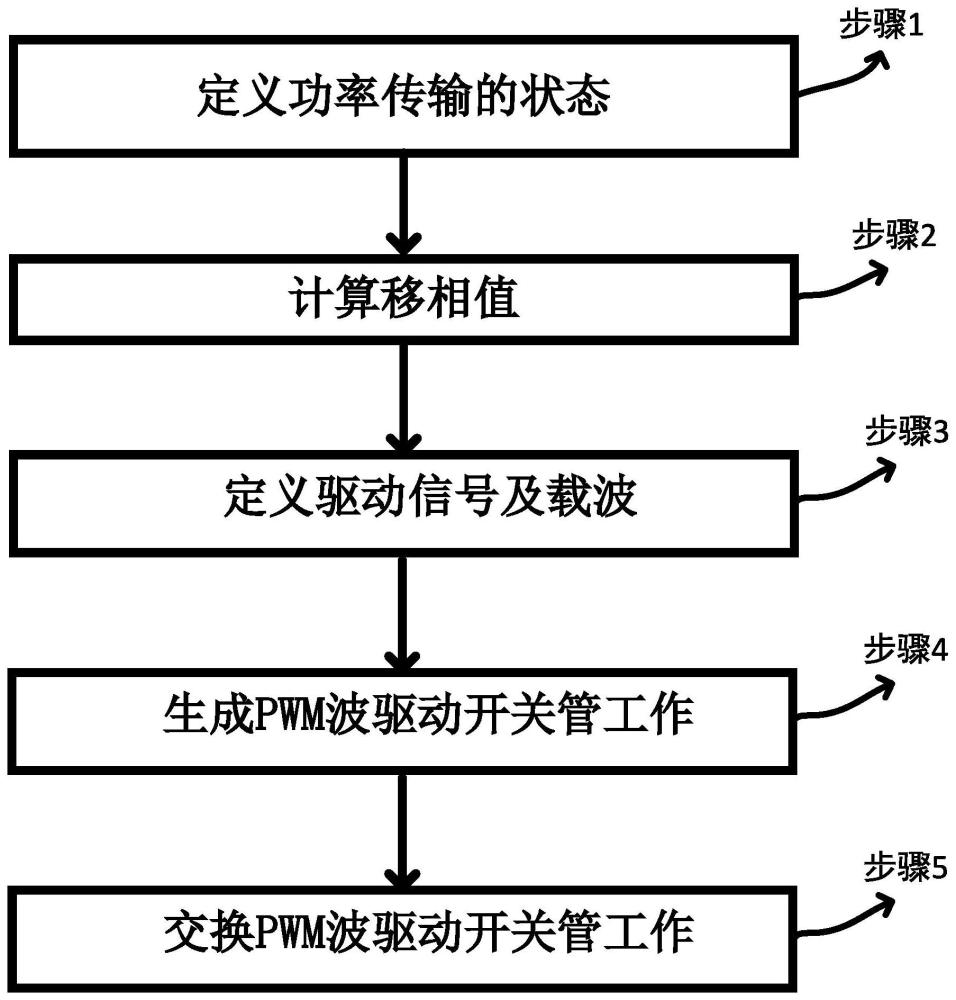
4、所述热平衡方法的步骤如下:
5、步骤1,定义功率传输的状态
6、给定副边侧直流电源的直流输出电流指令值iref,定义功率传输状态如下:若iref>0,功率由原边侧直流电源流向副边侧直流电源,并定义为功率正向传输;若iref<0,功率由副边侧直流电源流向原边侧直流电源,并定义为功率反向传输;若iref=0,功率不发生传输;
7、步骤2,计算移相值
8、采样副边侧直流电源的直流输出电流iout,计算直流输出电流误差信号δiout,δiout=iref-iout,将直流输出电流误差信号δiout送入pi调节器得到移相值(d1,d2,d3),其中,d1为开关管sp1、开关管sp2、开关管sp3在高电平时的占空比,d2为开关管ss1、开关管ss2、开关管ss3在高电平时的占空比,d3为开关管sp1和开关管ss1的相位差;
9、步骤3,定义驱动信号及载波
10、将开关管spi的驱动信号记为驱动信号qpi,将开关管ssi的驱动信号记为驱动信号qsi,其中:
11、驱动信号qp1、驱动信号qp2的三角载波为载波vt1,驱动信号qp3、驱动信号qp4的三角载波为载波vt2,驱动信号qp5、驱动信号qp6的三角载波为载波vt3,其中,载波vt1与载波vt2的相位差为120°,载波vt2与载波vt3的相位差为120°;驱动信号qs1、驱动信号qs2的三角载波为载波vt1*,驱动信号qs3、驱动信号qs4的三角载波为载波vt2*,驱动信号qs5、驱动信号qs6的三角载波为载波vt3*,其中,载波vt1*与载波vt2*的相位差为120°,载波vt2*与载波vt3*的相位差为120°;定义载波频率为f,周期
12、步骤4,生成pwm波驱动开关管工作;
13、当载波vt1在(0-d1t)时间内,驱动信号qp1输出高电平,驱动信号qp2输出低电平;当载波vt1在(d1t-t)时间内,驱动信号qp1输出低电平,驱动信号qp2输出高电平;当载波vt2在(0-d1t)时间内,驱动信号qp3输出高电平,驱动信号qp4输出低电平;当载波vt2在(d1t-t)时间内,驱动信号qp3输出低电平,驱动信号qp4输出高电平;当载波vt3在(0-d1t)时间内,驱动信号qp5输出高电平,驱动信号qp6输出低电平;当载波vt3在(d1t-t)时间内,驱动信号qp5输出低电平,驱动信号qp6输出高电平;当载波vt1*在(0-d2t)时间内,驱动信号qs1输出高电平,驱动信号qs2输出低电平;当载波vt1*在(d2t-t)时间内,驱动信号qs1输出低电平,驱动信号qs2输出高电平;当载波vt2*在(0-d2t)时间内,驱动信号qs3输出高电平,驱动信号qs4输出低电平;当载波vt2*在(d2t-t)时间内,驱动信号qs3输出低电平,驱动信号qs4输出高电平;当载波vt3*在(0-d2t)时间内,驱动信号qs5输出高电平,驱动信号qs6输出低电平;当载波vt3*在(d2t-t)时间内,驱动信号qs5输出低电平,驱动信号qs6输出高电平;其中,当驱动信号为高电平时开关管导通,驱动信号为低电平时开关管关断;
14、步骤5,交换pwm波驱动开关管工作
15、当满足预设的交换pwm波条件时,生成交换pwm波指令驱动开关管工作,其具体状态如下:
16、定义d1’为交换pwm波后开关管sp1、开关管sp2、开关管sp3在高电平时的占空比,d2’为交换pwm波后开关管ss1、开关管ss2、开关管ss3在高电平时的占空比,d1’=1-d1,d2’=1-d2;
17、当载波vt1在(0-d1’t)时间内,驱动信号qp1输出高电平,驱动信号qp2输出低电平;当载波vt1在(d1’t-t)时间内,驱动信号qp1输出低电平,驱动信号qp2输出高电平;当载波vt2在(0-d1’t)时间内,驱动信号qp3输出高电平,驱动信号qp4输出低电平;当载波vt2在(d1’t-t)时间内,驱动信号qp3输出低电平,驱动信号qp4输出高电平;当载波vt3在(0-d1’t)时间内,驱动信号qp5输出高电平,驱动信号qp6输出低电平;当载波vt3在(d1’t-t)时间内,驱动信号qp5输出低电平,驱动信号qp6输出高电平;当载波vt1*在(0-d2’t)时间内,驱动信号qs1输出高电平,驱动信号qs2输出低电平;当载波vt1*在(d2’t-t)时间内,驱动信号qs1输出低电平,驱动信号qs2输出高电平;当载波vt2*在(0-d2’t)时间内,驱动信号qs3输出高电平,驱动信号qs4输出低电平;当载波vt2*在(d2’t-t)时间内,驱动信号qs3输出低电平,驱动信号qs4输出高电平;当载波vt3*在(0-d2’t)时间内,驱动信号qs5输出高电平,驱动信号qs6输出低电平;当载波vt3*在(d2’t-t)时间内,驱动信号qs5输出低电平,驱动信号qs6输出高电平;其中,当驱动信号为高电平时开关管导通,驱动信号为低电平时开关管关断。
18、优选地,所述预设的交换pwm波条件为预设的间隔时间d;所述生成交换pwm波指令的过程如下:预先设定一个间隔时间d,间隔时间d到,中断步骤4的发波,同时生成交换pwm波指令驱动开关管工作,交换pwm波驱动开关管工作结束后进入下一个间隔周期。
19、优选地,所述预设的交换pwm波条件为开关管的温差阈值δtref,所述生成交换pwm波指令的过程如下:
20、预先设定一个温差阈值δtref;
21、设在相同散热条件下,开关管sp1、开关管sp3和开关管sp5的温度相同,开关管sp2、开关管sp4和开关管sp6的温度相同,开关管ss1、开关管ss3和开关管ss5的温度相同,开关管ss2、开关管ss4、开关管ss6温度相同;
22、实时采样原边侧三相半桥电路中任意一个桥臂上的两个开关管的温度,并计算得到其温差t1,实时采样副边侧三相半桥电路中任意一个桥臂上的两个开关管的温度,并计算得到其温差t2;
23、在温差t1和温差t2中只要出现一个温差大于温差阈值δtref的状态,即中断步骤4的发波,同时生成交换pwm波指令驱动开关管工作;当温差t1、温差t2均小于或等于温差阈值δtref时,交换pwm波结束。
24、优选地,所述pi调节器的函数表达式为:
25、
26、其中,kp为pi调节器比例系数,ki为pi调节器积分系数,s为拉普拉斯算子。
27、相对于现有技术,本发明的有益效果包括:
28、1、本发明不需要增加额外的硬件电路和其他元器件,只需要在软件层面进行优化和修改就可以实现热平衡的目标,提高平台的效率,更加易于工程应用。
29、2、本发明在充分考虑了现有方案的优缺点,在保证电路的其他优化目标实现的基础上,充分考虑三相dc-dc电路实际运行中存在的热平衡问题,用交换发波解决。
30、3、本发明的适用范围很广,也适用于si-mosfet、igbt等器件。
- 还没有人留言评论。精彩留言会获得点赞!