一种基于模型下沉的光伏阵列积灰监测方法和系统与流程
本发明涉及分布式光复运行维护,特别涉及一种基于模型下沉的光伏阵列积灰监测方法和系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、近年来,分布式光伏发电呈现爆炸式增长,光伏阵列发电效率受到越来越多的关注。
3、由于分布式光伏系统通常属于不同业主所有,而且规模相对较小,缺乏合理的清洁与运维。这不可避免的造成了众多长期暴露在室外的光伏阵列长期受到灰尘影响。积灰导致光伏阵列受到的辐照度显著降低,不能按照预期规划发电,影响了业主的收益。据调查,积灰可使发电效率降低20%以上,甚至高达80%。及时有效的清洁能够显著提高光伏阵列发电效率,提高所有者收益。
4、现有的光伏阵列积灰程度监测大致分为以下三类:第一类是直接对光伏阵列进行称重,通过重量变化测定灰尘累积程度,但这需要在建设初期安装精密的称重仪器;第二类是采用各种摄影摄像设备对光伏阵列成像,通过图像处理和分析判断积灰程度,但这需要购置成像设备甚至是无人机;第三类是基于数据驱动的光伏阵列积灰监测方案,通过分析光伏阵列运行数据分析光伏阵列积灰程度。
5、虽然第三种方案被认为是经济可行的,但在实际操作中仍存在以下困难:第一点是光伏阵列数据需要高频、高速上传到云端进行分析处理才能对其积灰程度进行有效监测,这产生了大量的流量费用;第二点是数据分析依赖的人工智能模型需要大量的有标签样本进行训练,而获取有标签样本存在困难,尤其是对于分属于不同业主的分布式光伏阵列更是难以实施。
技术实现思路
1、本发明的目的是克服现有技术缺陷,提供一种基于模型下沉的光伏阵列积灰监测方法和系统,该方法在原有基于数据驱动的光伏阵列积灰监测方案基础上,通过模型下沉的方式,将训练好的门控循环单元(gru)人工智能模型由云端转移到边缘端,通过集成在逆变器内部的处理芯片实现特征提取,进而降低通讯频率和速度,节省流量费用。
2、本发明的目的一方面是这样实现的:一种基于模型下沉的光伏阵列积灰监测方法,包括:
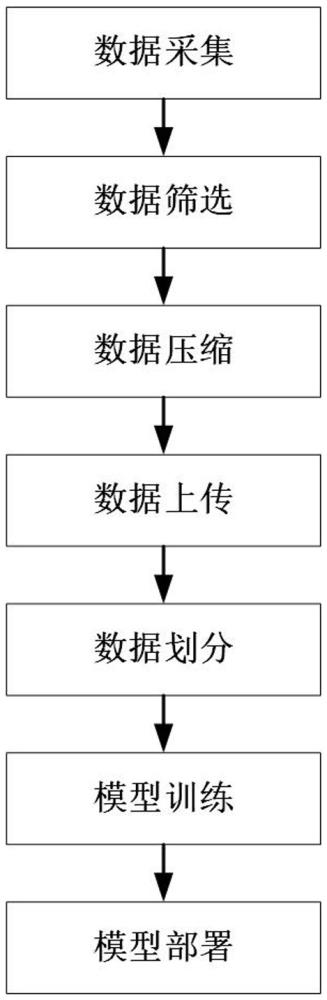
3、1)获取分布式光伏系统的边缘端光伏阵列输出数据;
4、2)对步骤1)中获得的数据进行数据的筛选,并提取有效数据;
5、3)使用改进的差分编码对采样数据进行压缩编码;
6、4)上传压缩后的数据,并在云端训练用于数据压缩的人工智能模型和用于光伏阵列积灰监测的模型;
7、5)将训练好的用于数据压缩的人工智能模型加载到与光伏阵列电气相连的逆变器的控制器中;
8、6)逆变器的控制器运行用于数据压缩的人工智能模型,并将压缩后数据上传至云端;
9、7)云端通过半监督k-means模型分析数据,判断光伏阵列是否需要清洗;
10、8)对于需要清洗的光伏阵列,通知其业主。
11、作为本发明的进一步限定,步骤1)中所述分布式光伏系统边缘端为与分布式光伏阵列直接连接的逆变器;所述分布式光伏系统边缘端与云端处理器通讯连接;所述光伏阵列输出数据包括光伏阵列的输出电流和输出电压。
12、作为本发明的进一步限定,所述步骤2)具体包括:在获取光伏阵列输出数据之后,进行数据的筛选,剔除由于边缘端未处于正常运行状态的无效数据或由于边缘端未追踪到分布式光伏阵列最大功率的无效数据;
13、剔除由于边缘端未处于正常运行状态的无效数据;逆变器处于故障或待机状态时的采样数据是无效的,被筛除;
14、筛除掉由于逆变器未处于最大功率点处运行导致的无效数据;当某一时段内电压的最大波动范围超过阈值时采样数据是无效的,被筛除。
15、作为本发明的进一步限定,所述步骤3)具体包括:使用改进差分编码进行数据降噪和压缩编码,数据保存格式为[与上一数值的差值,持续时间];数据降噪通过选择合适的阈值,将处于同一区间内的数据用一个数值表示;将降噪处理后的数据差分重编码格式为[与上一数值的差值,持续时间]。
16、作为本发明的进一步限定,所述步骤4)具体包括:对上传数据划定标签,将数据分为有标签数据和无标签数据;有标签数据分为“干净”和“脏”;认定清洗后光伏阵列在一段时间内是干净的,为这一段时间内采集到的数据标定“干净”标签;认定清洗前光伏阵列在一段时间内是脏的,为这一段时间内采集到的数据标定“脏”标签;
17、搭建由gru和k-means组成的模型并训练,利用每次清洗前后新数据对k-means模型进行更新;其中gru模型部署于逆变器用于进行数据压缩,k-means模型部署于云端,用于积灰状态监测。
18、作为本发明的进一步限定,所述搭建由gru和k-means组成的模型并训练具体包括:gru模型的输入数据为逆变器上传至云端的被压缩和重编码后的有标签数据,gru输出的是确定维度的特征值,每个gru模型与光伏阵列一一对应;k-means模型的输入是多个gru模型的输出,k-means模型的输出是积灰状态监测结果;模型训练过程中的目标是使具有相同标签的特征值在k空间内距离正确聚类中心更近;其中聚类中心和特征值到聚类中心的距离表示为
19、其中,ci,p表示第p个类别的聚类中心cp的第i维坐标值,n表示所有标签为p的数据的数量,ki,p,n表示第n个标签为p的数据在第i维坐标的数值,dq,p,n表示第p个类别中第n个数据距离第q个分类中心的距离,i表示特征值的数据维度;
20、模型训练结束条件包括:所有有标签数据特征值在k空间内到正确的聚类中心距离小于到所有错误的聚类中心距离,即满足dp,p,n<dq,p,n q≠p,其中dp,p,n和dq,p,n表示标签为p的第n个数据到标签为p和标签为q的聚类中心的距离;或达到最大迭代次数。
21、作为本发明的进一步限定,所述k-means模型的训练过程为:
22、a)根据实际情况选择分类个数根据实际情况选择分类个数;
23、b)有标签数据根据标签分类并计算聚类中心;
24、c)有标签数据计算到各聚类中心的距离;
25、d)当所有有标签数据都满足有标签数据特征值在k空间内到正确的聚类中心距离小于到所有错误的聚类中心距离时,或达到最大迭代次数时退出训练,否则更新gru模型并重新执行b)-d);
26、e)将无标签数据加入k空间并继续更新模型;
27、f)计算每个无标签数据距离各聚类中心的距离;
28、g)将无标签数据归入距离它最近的聚类中心所在的类;
29、h)重新计算聚类中心;
30、i)重复f)-h)直到聚类中心不再改变。
31、作为本发明的进一步限定,所述利用每次清洗前后新数据对k-means模型进行更新,更新准则为:
32、
33、其中cp,t-1和cp,t表示本次和上一次标签为p的数据的聚类中心,kp,t,n表示本次中有标签数据中分类为p的第n个,nt是本次分类为p的所有有标签数据的数量;α是更新因数,α越大代表聚类中心越靠近最新一次的采样数据,α越小代表聚类中心越靠近历史数据。
34、作为本发明的进一步限定,所述云端为服务器、数据中心、个人电脑或者是集成在某台逆变器内部的控制器中。
35、本发明的目的另一方面是这样实现的:一种基于模型下沉的光伏阵列积灰监测方系统,包括有效数据获取模块、数据压缩模块、特征提取模块、数据上传模块、积灰程度判断模块和报告通知模块;
36、所述有效数据获取模块用于获取分布式光伏系统的边缘端光伏阵列输出数据,并筛选出有效数据;
37、数据压缩模块用于通过改进的差分编码;
38、特征提取模块用于通过gru模型提取分布式光伏阵列关于积灰监测的特征值;
39、数据上传模块用于以无线方式上传特征值到云端;
40、积灰程度判断模块用于通过半监督k-means分类模型根据上传数据判断光伏阵列是否需要清洗;
41、报告通知模块用于在光伏阵列需要清洗时向相应业主提交报告通知。
42、本发明采用以上技术方案,与现有技术相比,有益效果为:本发明通过本地数据处理和半监督学习,实现低成本、低操作复杂度的分布式光伏阵列有效监控;该方法对光伏阵列材质、拓扑结构、使用年限无要求,具有普适性。
43、本发明无需增加任何额外设备,仅在原有分布式光伏系统中添加智能算法,可实现分布式光伏积灰监测,极大降低了监测成本;不同于现有的基于数据驱动和人工智能方法进行分布式光伏阵列积灰监测的方法,该方法无需高速、高频的数据传输通道;同时,不需要海量有标签数据训练模型,降低了操作复杂度。
- 还没有人留言评论。精彩留言会获得点赞!