基于粒子群算法的直驱风电机组控制参数辨识方法及系统与流程
本发明涉及电力变换器的,尤其涉及基于粒子群算法的直驱风电机组控制参数辨识方法及系统。
背景技术:
1、随着环境保护意识的增强以及能源可持续利用的重要性日益凸显,新能源电源在电力系统中的占比逐步提升。风电、光伏等新能源具有间歇性、随机波动性等特点,大规模接入可能影响电网稳定运行。构建精确的新能源模型是实现电力系统分析、控制设计、规划和运行方案制定的基础。模型精度取决于并网逆变器相关控制参数的准确性,而设备制造商和运营商在通常不会提供这些参数。为此需要通过对其响应特性进行试验测试来实现相关控制参数的辨识。
2、目前参数辨识方法主要采用最小二乘法或神经网络等方法,通过施加扰动、测量输出实现参数的辨识。一些在设备外部施加扰动、获取设备内部的量测信息,一些方法在设备内部控制参数施加扰动、测量相应的输出量,一些方法需要同时获取扰动和观测量,在工程实际现场应用时对实验条件要求较高,难以实施。
技术实现思路
1、鉴于上述现有存在的问题,提出了本发明。本发明针对现有参数辨识方法对实验要求过高或所需设备内部观测过多的问题,通过构造与该设备频率响应特性近似或一致的系统,实现对原设备参数的辨识,本发明仅需在端口进行试验和测量来获得频率响应特性,对试验条件要求低。
2、为解决上述技术问题,提出了基于粒子群算法的直驱风电机组控制参数辨识方法,包括,
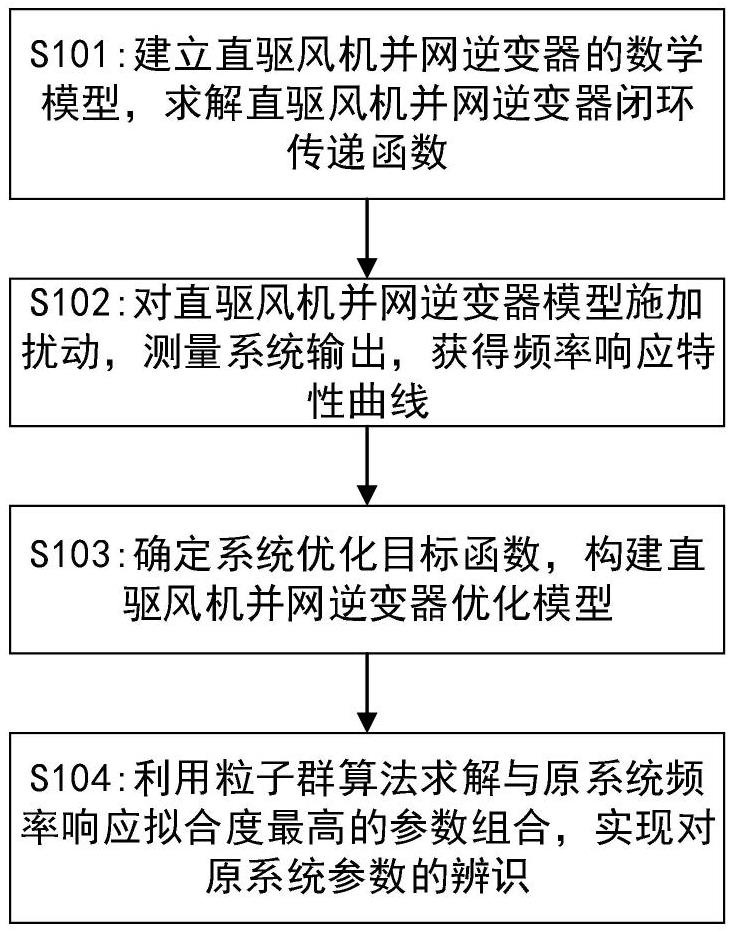
3、建立直驱风机并网逆变器的数学模型,求解直驱风机并网逆变器闭环传递函数;对直驱风机并网逆变器模型端口施加扰动电压,测量系统输出电流,获得频率响应特性曲线;构建直驱风机并网逆变器优化模型并进行模型不确定性处理;利用粒子群算法求解与原系统频率响应拟合度最高的参数组合,实现对原系统控制参数的辨识。
4、作为本发明所述的基于粒子群算法的直驱风电机组控制参数辨识方法的一种优选方案,其中:所述数学模型包括,分别通过建立电网侧电感矩阵和变流器两部分的动态方程模型。
5、其中,变流器各环节的动态方程为:
6、锁相环方程:
7、
8、其中,θpll为锁相环输出角度,uq为并网点电压q轴分量,kppll、kipll为锁相环比例、积分系数,ω0为同步转速,ω为锁相环测量转速,s为微分算子。
9、电流内环控制方程:
10、
11、其中,usd、usq为逆变器侧电压d、q轴分量,ud为并网点电压d轴分量,kpi、kii为内环控制器比例、积分系数,idref、iqref、id、iq为电流参考值、实际值,t为时间常数,lf为逆变器侧滤波器电感,t为时间常数。
12、滤波电感电压方程:
13、usd=ud+(lfs+r)id-ωlfiq
14、usq=uq+(lfs+r)iq+ωlfid
15、其中,r为滤波器电阻。
16、电压外环控制方程:
17、
18、其中,kpdc、kidc为外环pi控制器比例、积分系数,udc为直流母线电压。
19、直流母线电压方程:
20、
21、其中,cdc为直流侧电容,pm为直流侧有功功率。
22、电网侧纯感性阻抗矩阵h(s)为:
23、
24、其中,egd、egq为电网扰动电压d、q分量,lg为电网侧电感。
25、作为本发明所述的基于粒子群算法的直驱风电机组控制参数辨识方法的一种优选方案,其中:所述直驱风机并网逆变器闭环传递函数包括,将动态方程在额定工作点线性化,规定变流器的功率因数范围为0至1,得到dq坐标下变流器侧的状态空间方程及传递函数g-1(s):
26、
27、上式经变换得到:
28、
29、其中,ydd,yqq为dq坐标系下对应导纳开环传递函数,功率因数范围为0至1时,yqd,ydq取零,u0、i0为稳态电压和电流。
30、
31、将电网侧阻抗矩阵作为反馈通道引入传递函数中,以电压为输入,电流为输出,可得到该系统的完整闭环传递函数:
32、
33、其中,ygdd、ygdq、ygqd、ygqq为dq坐标系下对应导纳闭环传递函数,分别为:
34、
35、其中,udc0为线性化后额定工作点处直流电压。
36、作为本发明所述的基于粒子群算法的直驱风电机组控制参数辨识方法的一种优选方案,其中:所述频率响应特性曲线包括对模型施加扰动,搭建直驱风机并网逆变器的仿真模型,在并网端口点处每间隔10hz分别施加幅值为0.02p.u.的电压扰动,测量电流输出,获得dq坐标下频率响应特性的伯德图。
37、作为本发明所述的基于粒子群算法的直驱风电机组控制参数辨识方法的一种优选方案,其中:所述构建直驱风机并网逆变器优化模型包括,采用标准差为目标函数的适应度值公式为:
38、
39、其中,a,aa_meas为原系统伯德图幅值,测量系统幅值。为原系统伯德图相位,测量系统相位。n为测量数据长度。
40、优化目标使参考频率响应特性与辨识所得实际频率响应特性幅值和相位的差值最小。
41、作为本发明所述的基于粒子群算法的直驱风电机组控制参数辨识方法的一种优选方案,其中:所述模型不确定性处理包括,处理直驱风电机组数学模型参数中的不确定性:
42、
43、当|u(xi)|<∈,∈=1.5且所有x对应的u(xi)值都落在(-1kw,1kw)时,则认为不确定性已处理完成,当|u(xi)|≥∈,∈=1.5且所有x对应的u(xi)值未全部落在(-1kw,1kw)时,则数学模型还存在不确定性,则继续更新,直至满足|u(xi)|<∈,∈=1.5且所有x对应的u(xi)值都落在(-1kw,1kw)时停止更新。
44、其中,u(xi)为不确定处理函数,xi为第i个粒子的位置,n为粒子群算法中的粒子数量,πj第i个粒子的个体最优位置,f(xi)为所述建立电网侧电感矩阵和变流器两部分的动态方程模型。
45、作为本发明所述的基于粒子群算法的直驱风电机组控制参数辨识方法的一种优选方案,其中:所述对原系统控制参数的辨识包括,确定待辨识参数包括kpdc、kidc、kpi、kii、kppll、kipll六个,设定种群大小,维度的初始值,并初始化6个控制器参数值。
46、计算适应度值,求出个体和群体最优,更新个体速度和位置,产生新种群。
47、所述更新个体速度和位置包括,采用粒子群算法速度与位置更新公式为:
48、
49、xu+1=xu+vu+1
50、其中,x、v分别为粒子位置和速度,ω为惯性权重,c1、c2分别为社会权重、认知权重学习因子,r1、r2为0~1之间的随机值,pb、gb为种群和全局最优值。
51、判断是否满足精度包括模型误差不超过5%,若满足精度,则输出参数最优值,若不满足精度,则重新更新个体速度和位置。
52、本发明的另外一个目的是提供了基于粒子群算法的直驱风电机组控制参数辨识系统,本发明实现对直驱风电机组控制参数的准确辨识,以提高直驱风电机组的控制性能和稳定性。通过优化模型参数,使得模型的频率响应特性与实际系统的频率响应特性之间的差异最小,从而提高直驱风电机组在并网运行时的性能,确保其能高效、稳定地运行,满足电网的要求。
53、作为本发明所述的基于粒子群算法的直驱风电机组控制参数辨识系统的一种优选方案,其特征在于,包括模型建立与线性化模块、频率响应特性曲线获取模块以及粒子群优化与参数辨识模块。
54、所述模型建立与线性化模块,负责建立直驱风机并网逆变器的数学模型,包括电网侧电感矩阵和变流器两部分的动态方程模型,通过对动态方程在额定工作点进行线性化处理,得到dq坐标下变流器侧的状态空间方程及传递函数作为后续参数辨识的基础。
55、所述频率响应特性曲线获取模块,通过在直驱风机并网逆变器的仿真模型上施加扰动电压,并测量系统输出电流,得到系统的频率响应特性曲线,与数学模型预测的响应进行对比,以评估模型参数的准确性。
56、所述粒子群优化与参数辨识模块,使用粒子群算法来优化数学模型中的参数,使得模型的频率响应特性与实际系统的频率响应特性之间的差异最小,并利用粒子群算法的迭代过程来寻找最优的参数组合。
57、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现基于粒子群算法的直驱风电机组控制参数辨识所述的方法的步骤。
58、一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现基于粒子群算法的直驱风电机组控制参数辨识所述的方法的步骤。
59、本发明的有益效果:本发明针对现有控制参数辨识方法大多需要获取设备内部测量信息,对实验条件要求较高的问题,提出了一种基于粒子群算法的直驱风机并网逆变器控制参数辨识方法。该参数辨识算法能在仅在端口施加电压扰动并测量电流输出情况下对控制器参数进行辨识,对实验条件要求较低,且最大误差不超过2%,具有较高的辨识精度。并且可由新能源场站与电网公司分散实施,具有较好的实用性
- 还没有人留言评论。精彩留言会获得点赞!