工控交流伺服系统多频振动点在线检测及振动抑制方法与流程
本发明涉及电力电子,具体为工控交流伺服系统多频振动点在线检测及振动抑制方法。
背景技术:
1、工控领域多应用伺服系统提高生产效率和减少损耗。伺服系统是一种采用反馈控制达到调节装置位移、速度或加速度,确保位移准确跟踪给定位置,常见类型有液压、交流、直流和电液伺服系统。伺服永磁电机交流控制系统因其稳定性好、快速性好、精度高、响应速度快、调速范围宽、定位准确等特点,成为工控领域的控制核心,扮演着不可替代的角色。
2、传统位置伺服系统一般采用位置-速度-电流三闭环逐级校正结构,具备较高位置跟踪精度和动态响应。电机控制建模领域一般将引入柔性传动关节的系统称为多惯量系统。多惯量系统会导致伺服系统带宽变小,降低伺服增益才能减少振动。增益降低会导致系统刚性降低,稳定时间延长,影响轨迹跟踪和高速定位性能。参数辨识技术对于提升伺服系统在变化的不同工况的控制性能至关重要。传统方法难以全面辨识系统特性,且在线辨识振动频率难以同时满足快速性和准确性。因此,机械参数辨识技术的深入研究对工控领域的技术推进与产业提升具有很大作用。
3、在交流伺服系统中,振动参数辨识通常可以分为电气参数的辨识和机械参数辨识两种。只有准确地检测到振动频率,才能及时采取相应的控制措施来抑制振动,从而提高系统的稳定性和性能。机械谐振参数辨识又可以分为离线和在线辨识两大类,离线辨识一般指在伺服系统不工作模式下的系统测试,而在线辨识指在不改变电机运行状态前提下进行实时识别机械参数。已经有的辨识方案有很多,选择合适的辨识方法来识别系统机械参数可以提高控制模型的精确性,为抑制振动的必要性提供出发点。
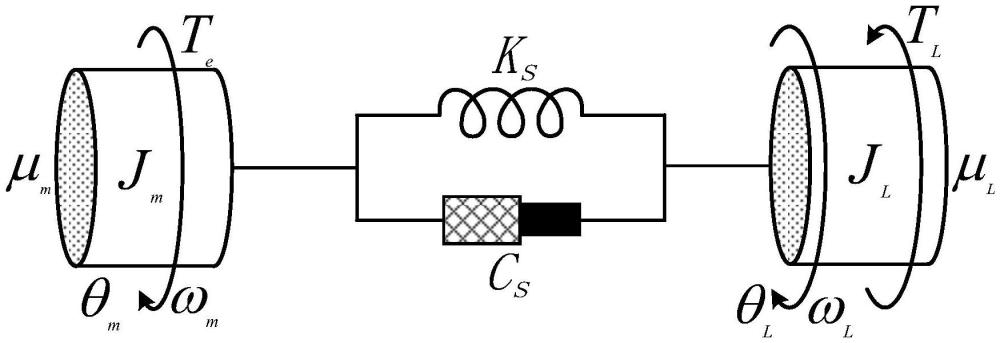
4、工控伺服系统运行过程中的机械振动来源一般有两种:高速运行工作模式下电机与负载的转速不同步和位置急停工作模式下不均匀大负载定位时引发的时延低频抖动。若电机通过柔性传动关节驱动负载,因为柔性传动装置不为理想同步连接体,会导致系统中会出现共振点或反共振点,从而导致速度的高频波动。当输出转速频率接近柔性传动关节的固有频率时,会引发严重的转速共振或反共振现象。
5、针对工控伺服系统的振动抑制方式,主要有三种:对弹性传动机械装置的优化、主动抑制和被动抑制。
技术实现思路
1、针对现有技术的缺陷和改进需求,本发明提供了一种工业控制交流伺服系统存在的多频振动点在线检测算法及振动抑制算法,其目的在于在交流伺服系统不同工况下都能快速的进行振动的检测及最优抑制策略的实施。
2、为实现以上目的,本发明通过以下技术方案予以实现:工控交流伺服系统多频振动点在线检测及振动抑制方法,包括振动频点在线辨识方法以及不同振动频点施加的抑制方法;
3、振动频点在线辨识方法采用在线快速傅里叶分析算法,其中包括低频振动辨识方案和高频振动辨识方案;
4、在线快速傅里叶分析算法,用于处理位置振动或速度振动即反馈与给定的差,以获取系统的共振点或反共振点,相较于dft,数据长度越长,快速傅里叶变换计算量越低、计算速度则越快,从而在电机正常运行过程中实时获取共振点信息;
5、利用离散傅立叶变换的特性,将计算过程中的单项归为一类,将dft的长序列转化为短序列,从而减小计算量;快速傅里叶变换中,将对n点长序列x[n]进行的复数加法和复数乘法运算的次数降低至nlog2n次;
6、快速傅里叶变换按照分割长序列的点数分为基-2、基-4或分裂基,其中基-2实现路径设有多种,分为频域抽取法和时域抽取法;
7、不同振动频点施加的抑制方法包括低频振动抑制和高频振动抑制;
8、低频振动抑制,对于辨识出的低频振动点,视为定位抖动,设计位置指令陷波器抑制方案;
9、通过消除给定位置指令信号中的造成抖动的频率成分的方式,实现抖动抑制效果;改变位置给定信号包括低通滤波和陷波滤波两种,由于位置环的带宽比速度环带宽小,因此利用陷波器的窄频率宽度抑制特性处理位置给定信号;具体如下:
10、(1)将定位抖动的某些极点配置为陷波滤波器的分子;
11、(2)将陷波器的分母的极点替换为具有更高阻尼比的新极点;
12、同力矩陷波器,位置陷波器传递函数取双t型的形式,取新阻尼比ξ=1,根据陷波宽度与阻尼比的关系,可得陷波深度配置为dp=log10k0,陷波中心频率则为低频辨识的结果;
13、改进双t型陷波器的传递函数为:
14、
15、高频振动抑制,对于辨识出的高频振动点,设计可调参数陷波器抑制方案,对于辨识出的高频振动点,采用基于速度反馈补偿的有源滤波振动抑制方案;
16、对于速度环,通过速度观测器构建有源滤波器,对特定频率信号采样低通+高通滤波器的方式进行信号筛选,即带通滤波;有源滤波器采用速度观测器来实现,相当于一个共振频率的信号发生器主动消除速度反馈中出现的振动成分;
17、其中fadj为滤波频率补偿,fadj>0,选取特定频率范围内的速度波动量进行剔除。
18、可选的,所述低频振动辨识方案采用定位抖动峰谷翻转计时算法,位置环控制时,当伺服系统的谐振点低于100hz时,为了便于研究,可视为单一振动频率即负载固有频率抖动。对于定位抖动频率检测,设计了基于位置振动信号的峰谷翻转计时算法。由于定位抖动频率较低,峰谷翻转计时算法计算步骤简单、计算量小,适用于芯片中的离散化应用,减少对内存的占用。整体的思路是检测一定周期数量的时间间隔,平均后求出一个周期的时间,进而得到低频振动频率。
19、可选的,所述辨识方案选用频域抽取法对位置或速度误差信号进行频谱分析。
20、可选的,所述陷波器的设计采用零极点对消法。
21、本发明提供了工控交流伺服系统多频振动点在线检测及振动抑制方法,具备以下有益效果:
22、该工控交流伺服系统多频振动点在线检测及振动抑制方法,把交流伺服系统的振动分为低频和高频振动,首先设计在线辨识方法,在辨识的基础上对辨识出来的频率分别设计可调参数陷波器自动抑制方案、基于速度反馈补偿的有源滤波抑制方案与位置指令陷波器抑制方案,最终设计一种最优在线监测及主被动抑制方案,达到良好抑制效果;
23、其中,振动频点在线辨识方法为在线快速傅里叶分析算法,用于处理位置振动或速度振动即反馈与给定的差,以获取系统的共振点或反共振点,相较于dft,数据长度越长,快速傅里叶变换计算量越低、计算速度越快,能够在电机正常运行过程中实时获取共振点信息;实际工程应用领域,可以通过改进的快速傅里叶变换算法减少计算量;利用离散傅立叶变换的特性,可以将计算过程中的某些项归为一类,将dft的长序列转化为短序列,从而减小计算量;
24、对于定位抖动频率检测,设计了基于位置振动信号的峰谷翻转计时算法;由于定位抖动频率较低,峰谷翻转计时算法计算步骤简单、计算量小,适用于芯片中的离散化应用,减少对内存的占用;整体的思路是检测一定周期数量的时间间隔,平均后求出一个周期的时间,进而得到低频振动频率;
25、对于辨识出的高频振动点,设计可调参数陷波器抑制方案;陷波器属于带阻滤波器的一种,其阻带接近于零,作用是在一个非常窄的频率范围内抑制信号,而允许其他频率的信号通过;陷波器针对较高的频点,因此放在电流环前面进行力矩给定陷波;
26、经典陷波器在陷波器的中心频点处,幅值衰减是无穷大的,这意味着在该频点附近的信号会被完全抑制,但是需要对检测的频点准确度有很高的要求;只有当陷波器精确地在目标频点处施加衰减时,才能有效地抑制该频点附近的信号;
27、有源滤波器采用速度观测器来实现,相当于一个特定频率(共振频率)的信号发生器来主动消除速度反馈中出现的振动成分;此有源滤波方式降低了高频噪声的干扰,利用观测器的速度误差补偿速度负反馈环节,在中低频抑制方案中可采用;并且由于滤波频率补偿可调,因此可以较好的抑制不准确的频点;
28、对于辨识出的低频振动点,视为定位抖动,通过消除给定位置指令信号中的造成抖动的频率成分的方式,来实现抖动抑制效果;改变位置给定信号有低通滤波和陷波滤波两种方式,由于位置环的带宽比速度环带宽小很多,在工业控制领域,定位的相频响应没有太高的要求,因此可利用陷波器的窄频率宽度抑制特性处理位置给定信号;同力矩陷波器,位置陷波器传递函数也可以取双t型的形式,设计位置陷波器时,将原有分母上的极点替换为具有更高阻尼比的新极点;取新阻尼比ξ=1,根据陷波宽度与阻尼比的关系,可得陷波深度配置为dp=log10k0,陷波中心频率则为低频辨识的结果;
29、由上述各部分内容,最终设计最优在线抑制策略,能在三闭环伺服系统连接双惯量柔性负载时,以当前工况下最优的抑制效果为目标对不同来源的振动进行同时抑制。
- 还没有人留言评论。精彩留言会获得点赞!