一种基于电磁线圈和永磁铁混合驱动的磁驱动平台
本发明涉及磁驱动平台,尤其涉及一种基于电磁线圈和永磁铁混合驱动的磁驱动平台。
背景技术:
1、由于饮食习惯发生了显著变化,消化道疾病在世界范围内呈上升趋势,我国消化道癌的发病率和死亡率长期居于全球高位。研究表明,消化道癌症如果能早期发现,治疗效果显著提高,5年生存率可达90%以上,这增加了胃肠镜等消化道内窥镜的需求。目前临床中使用的内窥镜在检查过程中会引起疼痛和恶心,还可能出现感染、出血等并发症。
2、近年来,微型机器人受到越来越多的关注,这些机器人的尺寸小能进入到人体复杂和狭小的区域,在医学和生物工程方面具有非常大的应用潜力。微型机器人的主动驱动方式有很多,化学驱动、光学驱动、电驱动、磁驱动等等。由于磁驱动良好的可控性以及无放射性和其他的伤害,成为了首选的策略之一。
3、而磁驱动主要包括以下几种:
4、1、基于电磁线圈的驱动系统;
5、现有的使用电磁线圈的磁驱动系统有两种,一种是由配对的线圈组成的系统,通过使用亥姆霍兹线圈和麦克斯韦线圈的组合组成控制系统,亥姆霍兹线圈产生匀强磁场,麦克斯韦线圈产生梯度磁场提供力。
6、另一种是分布式的电磁线圈组成的系统,用于在给定电流的作用下生成空间梯度磁场,以驱动微型机器人跟踪期望轨迹移动;铁芯线圈模块包括六个铁芯以及设置在铁芯外围的线圈,六个带有所述铁芯的线圈两两成对相互正交排布。
7、2、基于单永磁铁的驱动系统;
8、基于磁偶极子模型,通过调整驱动磁铁的位姿来控制被控磁铁。现有的一种单磁铁驱动系统,美国anx robotics公司开发了一款磁驱动系统,该系统由一个3自由度的机械臂、一块球形永磁铁和外部旋转电机组成,通过机械臂控制球形磁铁的位置,使用外部电机控制磁铁的姿态,即永磁铁的磁化方向。
9、3、基于多永磁铁的驱动系统;
10、现有的一种多磁铁驱动系统,该系统由八个永磁铁和电机组成,通过旋转永磁体,产生一个可变大小的梯度场,实现控制。
11、上述方案存在以下缺陷:
12、1、针对现有的基于电磁线圈的驱动系统,其使用多个电源和线圈,成本昂贵,长时间使用会产生大量热量,电流控制复杂。
13、2、针对现有的基于单永磁铁的驱动系统,单个永磁铁最多产生五个自由度的控制,且需要控制永磁铁的位姿,容易产生关节奇异和任务空间碰撞的问题。
14、3、针对现有的基于多个永磁铁的驱动系统,其存在两个问题,第一是通过吸力控制被控对象,随着被控对象与驱动对象的距离缩小,磁力成指数级增长,胶囊控制,同时会在轴向产生抖动,对反馈系统和驱动系统的要求较高;第二是容易产生任务空间的碰撞,以及任务空间狭小,不利于进一步地生物临床应用。
技术实现思路
1、为了解决现有技术中的问题,本发明提供了一种基于电磁线圈和永磁铁混合驱动的磁驱动平台。
2、本发明提供的一种基于电磁线圈和永磁铁混合驱动的磁驱动平台的发明目的之一是:采用亥姆霍兹线圈和永磁铁的组合,实现被动磁铁的控制,实现电磁和永磁的混合驱动。
3、本发明提供的一种基于电磁线圈和永磁铁混合驱动的磁驱动平台的发明目的之二是:利用永磁铁的斥力来控制被动磁铁,在轴向上达到力平衡点,更加稳定,不会出现上下晃动的问题。
4、本发明提供的一种基于电磁线圈和永磁铁混合驱动的磁驱动平台的发明目的之三是:利用亥姆霍兹线圈中和被动磁铁由于驱动磁铁的斥力产生的转矩,解决了磁铁翻转的问题。
5、本发明提供的一种基于电磁线圈和永磁铁混合驱动的磁驱动平台的发明目的之四是:采用直线导轨和二自由度云台的组合,避免了任务空间的碰撞。
6、本发明提供了一种基于电磁线圈和永磁铁混合驱动的磁驱动平台,所述磁驱动平台由电磁线圈部分和永磁铁部分组合而成,在电磁线圈部分和永磁铁部分的混合驱动下,基于磁偶极子模型,实现被控磁铁的位置和姿态的控制。
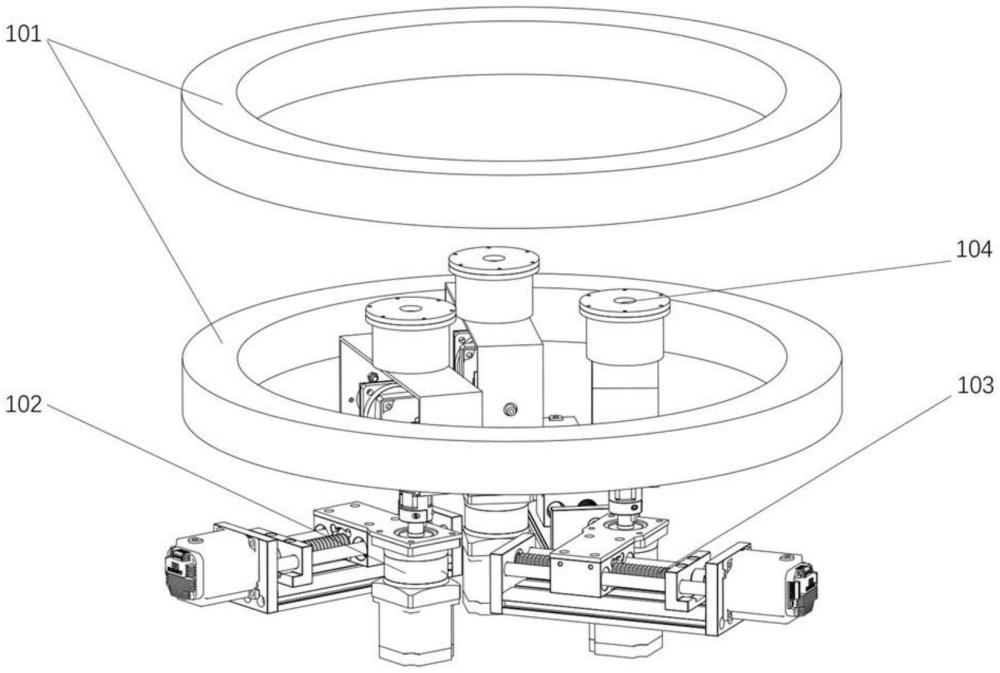
7、作为本发明的进一步改进,所述电磁线圈部分采用亥姆霍兹线圈,所述永磁铁部分包括三个永磁铁机构,所述永磁铁机构包括一一对应的运动平台和驱动磁铁,一个驱动磁铁对应安装在一个运动平台上,三个所述永磁铁机构的驱动磁铁均位于所述亥姆霍兹线圈之内,通过三个所述运动平台控制三个所述驱动磁铁的位置和姿态,在三个所述驱动磁铁和所述亥姆霍兹线圈的共同作用下,基于磁偶极子模型,实现被控磁铁的位置和姿态的控制。
8、作为本发明的进一步改进,所述亥姆霍兹线圈由一对完全相同的圆形线圈组成,两个圆形线圈的中心轴同轴,两个圆形线圈的轴向距离与圆形线圈的半径相等,每一个圆形线圈载有同向电流,通过控制电流的大小,在空间中产生期望的匀强磁场大小,不产生力。
9、作为本发明的进一步改进,三个永磁铁机构位于同一平面,并且,三个永磁铁机构绕所述亥姆霍兹线圈的中心轴的周向间隔120°分布。
10、作为本发明的进一步改进,所述运动平台包括一一对应的直线导轨和二自由度云台,一个二自由度云台安装在一条直线导轨上,一个驱动磁铁安装在一个二自由度云台上。
11、作为本发明的进一步改进,所述直线导轨驱动二自由度云台沿所述亥姆霍兹线圈的径向平移,所述二自由度云台驱动所述驱动磁铁进行二自由度转动并且沿所述亥姆霍兹线圈的径向平移,三个所述驱动磁铁的平移轨迹相交于所述亥姆霍兹线圈的中心轴,并且,三个所述驱动磁铁的平移轨迹绕所述亥姆霍兹线圈的中心轴的周向间隔120°分布。
12、作为本发明的进一步改进,两个圆形线圈呈上下分布,三个所述驱动磁铁与下层的圆形线圈位于同一水平面。
13、作为本发明的进一步改进,所述直线导轨与所述亥姆霍兹线圈相平行,所述二自由度云台的其中一个自由度的旋转轴与所述亥姆霍兹线圈相垂直,另外一个自由度的旋转轴与所述亥姆霍兹线圈相平行。
14、作为本发明的进一步改进,所述二自由度云台包括连接件、第一法兰盘、第二法兰盘、第三法兰盘、u型架、电机架、第一轴步进电机和第二轴步进电机,所述第一轴步进电机通过联轴器与所述第一法兰盘连接,所述第一法兰盘通过螺栓与所述电机架连接,所述第二轴步进电机固定在所述电机架上,所述第二轴步进电机通过联轴器与所述第二法兰盘连接,所述第二法兰盘与所述u型架的一端固定连接,所述u型架的另一端与所述第三法兰盘转动连接,所述第三法兰盘与所述电机架固定连接,所述驱动磁铁固定在所述u型架上,所述第一轴步进电机的旋转轴与所述亥姆霍兹线圈相垂直,所述第二轴步进电机的旋转轴与所述亥姆霍兹线圈相平行,所述u型架与所述第三法兰盘之间设置有套筒,所述连接件的一端与所述第一轴步进电机连接,所述连接件的另一端与所述直线导轨连接。
15、本发明的有益效果是:
16、1.本发明提出一种电磁线圈和永磁铁混合的磁驱动平台,针对现有的基于电磁线圈的驱动系统,仅采用了亥姆霍兹线圈,极大地降低成本,且减小发热;
17、2.针对现有的基于单永磁铁的驱动系统,本发明能够丰富磁铁控制的方式,不会产生任务空间碰撞的问题;
18、3.针对现有的基于多个永磁铁的驱动系统,本发明通过斥力来驱动被控对象,解决了由于吸力导致的磁力指数级增长的不稳定问题,同时不会产生任务空间的碰撞,很大可能性可以实现生物临床应用。
- 还没有人留言评论。精彩留言会获得点赞!