本技术属于光伏并网逆变器的,更具体地,涉及一种光伏并网逆变器的宽域自适应暂态稳定控制方法及系统。
背景技术:
1、现有较多光伏发电装机容量,为了避免严重的弃光现象,需要采用长距离输电线路将能源外送至高负荷地区。但长距离线路所带来的高阻抗会使光伏逆变器的并网环境呈现出弱电网的特征,此时在故障情况下新能源输出并网点的电压无法再像强电网环境下一样保持恒定,而是会随着并网电流的变化而产生波动。同时,当前光伏并网逆变器采用的多为基于锁相同步的电流控制型并网逆变器,其完全不同于传统的同步机,它不再具备同步机转子运动方程所含有的机械同步特性以实现故障下的调控与稳定。当并网逆变器接入弱电网时,除了并网逆变器锁相环所导致的非线性之外,弱电网的高阻抗也将通过并网点的电压与并网变换器的锁相及电流控制产生复杂的耦合作用,使得系统模型呈现高阶、强耦合、非线性的特征,极易造成失稳的情况甚至威胁整个电力系统的安全稳定运行。
2、光伏并网逆变器在大扰动下的稳定性包含了两个问题:一个是稳定运行状态的存在与否问题,即平衡点是否存在的问题;另一个则是当平衡点存在,系统能否由当前状态过渡到新的平衡点或者回到原平衡点的问题。针对大扰动下平衡点缺失的问题,有研究指出如果电网发生故障时电流指令设计不合适,将会导致因系统不存在平衡点而引发失稳现象;而即使平衡点存在,由于锁相环所引入的非线性特征,在大扰动下系统也可能无法从跌落后的初始状态过渡到新的稳定平衡点,因而仍存在失稳的风险。
3、目前,针对上述问题,主流的解决方法是综合考虑电网故障深度、线路阻抗、电流指令、系统参数与控制参数,通过时间尺度分离等方法将非线性系统简化后利用李雅普诺夫等方法进行稳定性分析,得到故障下电流指令与控制参数的可行域,在故障下确保系统工作在可行域内;此类方法综合考虑了锁相环与电流环的动态,建立了系统的详细模型,是当前研究的热点。然而,求得非线性系统的李雅普诺夫函数往往非常困难,且在使用李雅普诺夫判据时往往过于保守,使得可行域过小,有时甚至难以找到兼顾大扰动稳定性与小扰动稳定性的控制参数,因此在实际应用中往往受到限制。此外,上述方法也使得控制参数的设计过于繁琐与复杂。
技术实现思路
1、针对现有技术的缺陷,本技术的目的在于提供一种光伏并网逆变器的宽域自适应暂态稳定控制方法及系统,旨在解决传统光伏并网逆变器接入弱电网时,由于并网逆变器锁相环引入的非线性,以及弱电网的高阻抗也将通过并网点的电压与并网变换器的锁相及电流控制产生复杂的耦合作用,使得电网系统模型呈现高阶、强耦合、非线性的特征,极易造成失稳的情况甚至威胁整个电力系统的安全稳定运行的问题。
2、为实现上述目的,第一方面,本技术提供了一种光伏并网逆变器的宽域自适应暂态稳定控制方法,包括以下步骤:
3、s1:基于并网点交流电压信号,获取电网电压相位、锁相环输出偏差角以及锁相环输出偏差角的导数;
4、s2:根据锁相环输出偏差角、锁相环输出偏差角的导数以及偏差角指令值,获取电流环d轴电流给定值;
5、s3:通过电流环d轴电流给定值和并网点交流电流信号进行闭环调节以计算出调制电压信号;
6、s4:基于调制电压信号,通过空间矢量调制以生成得到控制光伏并网逆变器开关管的pwm控制信号。
7、进一步优选地,s2具体包括以下步骤:
8、s201:根据锁相环输出的锁相环输出偏差角,计算相应的反馈输出;
9、s202:将偏差角指令值与反馈输出的相反数相加,得到锁相环输出偏差角的二阶导数;
10、s203:根据锁相环输出偏差角的二阶导数、锁相环输出偏差角以及锁相环输出偏差角的导数,计算电流环d轴电流给定值。
11、进一步优选地,计算电流环d轴电流给定值的公式为:
12、
13、其中,lg为线路电感;δ”为锁相环输出偏差角的二阶导数;δ'为锁相环输出偏差角的一阶导数;ωg为电网角频率;为电流环d轴电流给定值;为并网点d轴电压;为并网点q轴电压;δ为锁相环输出偏差角;kpll=ki_pll/kp_pll,kp_pll为锁相环pi控制器比例系数,ki_pll为锁相环pi控制器积分系数。
14、进一步优选地,s201中的反馈输出获取方法,包括以下步骤:
15、将宽域自适应暂态控制方法对应的暂态控制系统等效为二阶系统,根据实际工程需要设置等效二阶系统期望的震荡角频率ωn与阻尼比ξ;
16、将锁相环输出偏差角做积分运算,积分结果与2ωnξ相乘,获取第一乘法结果;
17、将锁相环输出偏差角与相乘,获取第二乘法结果;
18、将第一乘法结果和第二乘法结果相加,获取相应的反馈输出。
19、进一步优选地,s1具体包括以下步骤:
20、s101:将三相静止坐标系下的并网点交流电压信号转换为两相旋转坐标系下的并网点d轴电压和q轴电压;
21、s102:根据并网点q轴电压,计算获取锁相环输出偏差角的导数;
22、s103:将锁相环输出偏差角的导数与标准电网角频率相加,得到锁相环预测的电网角频率;
23、s104:将锁相环预测的电网角频率进行积分运算,得到锁相环预测的电网电压相位;
24、s105:将锁相环输出偏差角的导数积分,得到锁相环输出偏差角。
25、进一步优选地,s3具体包括以下步骤:
26、通过并网点d轴电流、并网点q轴电流以计算获取前馈补偿信号;其中,前馈补偿信号包括d轴电压补偿信号和q轴电压补偿信号;
27、根据d轴电流给定值、q轴电流给定值和并网点d轴电流、并网点q轴电流,计算得到d轴电压信号和q轴电压信号;
28、将d轴电压信号与d轴电压补偿信号相加获得d轴调制电压信号,将q轴电压补偿信号与q轴电压信号相加,获得q轴调制电压信号。
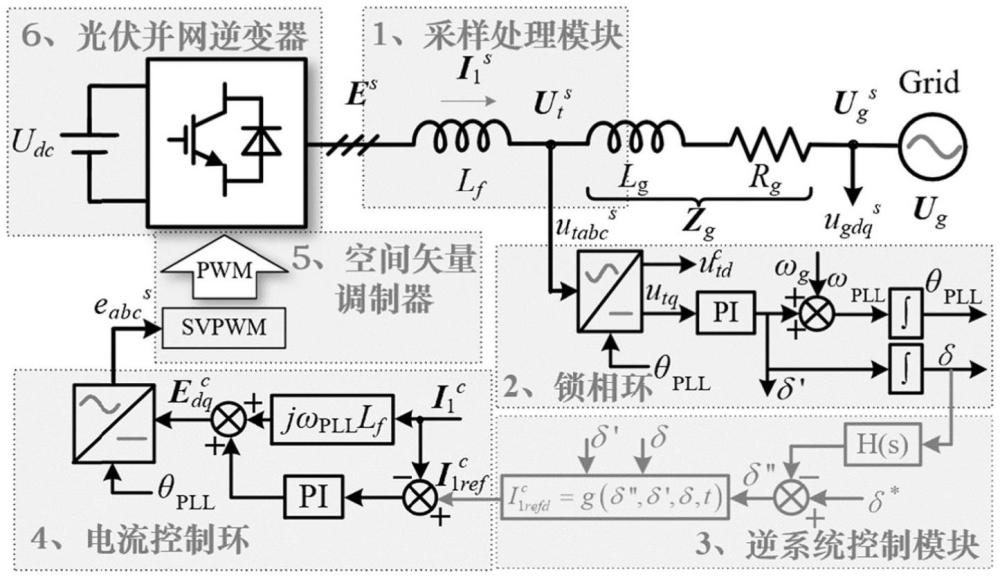
29、第二方面,本技术提供了一种光伏并网逆变器的宽域自适应暂态稳定控制系统,包括:采样处理模块、锁相环、逆系统控制模块、电流控制环、空间矢量调制器和光伏并网逆变器;
30、采样处理模块的输入端连接光伏并网逆变器的并网点,其第一输出端连接锁相环的输入端,其第二输出端连接至电流控制环的输入端;锁相环的输出端连接至逆系统控制模块的输入端;逆系统控制模块的输出端连接电流控制环;电流控制环的输出端连接空间矢量调制器的输入端;空间矢量调制器的输出端连接光伏并网逆变器的输入端;
31、采样处理模块用于采集并网点交流电压信号和交流电流信号;锁相环用于接收并网点交流电压信号,获取电网电压相位、锁相环输出偏差角以及锁相环输出偏差角的导数;逆系统控制模块用于根据锁相角输出偏差角、锁相环输出偏差角的导数以及偏差角指令值,获取电流环d轴电流给定值;电流控制环用于通过电流环d轴电流给定值和并网点交流电流信号进行闭环调节以计算出调制电压信号;空间矢量调制器用于接收调制电压信号,通过空间矢量调制以生成得到控制光伏并网逆变器开关管的pwm控制信号。
32、进一步优选地,逆系统控制模块包括:顺次相连的闭环控制器单元、第二加法单元和逆系统单元;
33、闭环控制器单元用于根据锁相环输出的锁相环输出偏差角,计算相应的反馈输出;
34、第二加法单元用于将偏差角指令值与反馈输出的相反数相加,得到锁相环输出偏差角的二阶导数;
35、逆系统单元用于根据锁相环输出偏差角的二阶导数、锁相环输出偏差角以及锁相环输出偏差角的导数,计算电流环d轴电流给定值。
36、进一步优选地,逆系统单元计算电流环d轴电流给定值的公式为:
37、
38、其中,lg为线路电感;δ”为锁相环输出偏差角的二阶导数;δ'为锁相环输出偏差角的一阶导数;ωg为电网角频率;为电流环d轴电流给定值;为并网点d轴电压;为并网点q轴电压;δ为锁相环输出偏差角;kpll=ki_pll/kp_pll,kp_pll为锁相环pi控制器比例系数,ki_pll为锁相环pi控制器积分系数。
39、进一步优选地,闭环控制单元包括第三积分器、第一乘法器、第二乘法器和第五加法器;
40、第三积分器用于将锁相环输出偏差角做积分运算;
41、第一乘法器用于将第三积分器获取的积分结果与2ωnξ相乘,获取第一乘法结果;
42、第二乘法器用于将锁相环输出偏差角与相乘,获取第二乘法结果;
43、第五加法器用于将第一乘法结果和第二乘法结果相加,获取相应的反馈输出;
44、其中,等效二阶系统期望的震荡角频率ωn与阻尼比ξ的获取方式为:通过数据处理器将宽域自适应暂态稳定控制方法等效的二阶系统,根据实际工程需要设置。
45、进一步优选地,电流控制环包括:前馈单元、pi控制器单元和调制信号生成单元;
46、前馈单元用于通过并网点d轴电流、并网点q轴电流以计算获取前馈补偿信号;其中,前馈补偿信号包括d轴电压补偿信号和q轴电压补偿信号;pi控制器单元用于根据d轴电流给定值、q轴电流给定值和并网点d轴电流、并网点q轴电流,计算得到d轴电压信号和q轴电压信号;调制信号生成单元包括第三加法器和第四加法器;第三加法器用于将将d轴电压信号与d轴电压补偿信号相加获得d轴调制电压信号,第四加法器用于将q轴电压补偿信号与q轴电压信号相加,获得q轴调制电压信号。
47、进一步优选地,锁相环包括:dq变换单元、pi控制器单元、第一加法单元、第一积分单元和第二积分单元;
48、dq变换单元的输入端连接采样处理模块的输出端,其输出端连接pi控制器单元;pi控制器的第一输出端连接第一加法单元,第二输出端连接第二积分单元;第一加法单元的输出端连接第一积分单元;
49、dq变换单元用于将三相静止坐标系下的并网点交流电流信号变换为两相旋转坐标系下的并网点d轴电流和并网点q轴电流;且将三相静止坐标系下的并网点交流电压信号转换为两相旋转坐标系下的并网点d轴电压和q轴电压;
50、pi控制器单元用于根据并网点q轴电压,计算得到锁相环输出偏差角的导数;
51、第一加法单元用于将锁相环输出偏差角的导数与标准电网角频率相加,得到锁相环预测的电网角频率;
52、第一积分单元用于将锁相环预测的电网角频率进行积分运算,得到锁相环预测的电网电压相位;
53、第二积分单元用于将锁相环输出偏差角的导数积分,得到锁相环输出偏差角。
54、总体而言,通过本技术所构思的以上技术方案与现有技术相比,具有以下有益效果:
55、本发明考虑了电网故障期间的光伏并网逆变器在弱电网下锁相环的稳定性问题,在传统控制系统的基础上,加入了逆系统控制,直接控制锁相环输出偏差角δ使其稳定,将电流环d轴电流给定值设为逆系统的输出,保证了光伏并网逆变器系统的大扰动稳定。加强了锁相环控制器参数的适应性。本发明相对于其他现有的弱电网光伏并网逆变器故障穿越控制方法,加强了锁相环控制器参数的适应性,使得锁相环控制器参数的设计只需考虑稳态工况与小扰动工况,可以极大增强弱电网下光伏并网逆变器的故障穿越能力。此外,具有控制结构简单,易于工程实施的优点。