一种电动汽车双无刷直流电机驱动装置及控制方法
本发明属于驱动装置,具体涉及一种电动汽车双无刷直流电机驱动装置及控制方法。
背景技术:
1、电动汽车控制器是由“单电机”驱动,“单电机”对比“双电机”优势更多是能够降低汽车的成本,由于“单电机”驱动装置虽然结构上简单,控制方式灵活,但是在面对复杂多变的行驶路况时,电机经常会处于低效率的工作区域内。这种情况在增加了汽车的能耗,降低了行驶里程的同时也对汽车的安全性提出了挑战。而双电机的优势所在主要体现在以下两个方面:安全性更好,能耗低。目前对双无刷电机的控制存在精度低、响应慢的问题。
2、专利公开号为cn105048918a,名称为一种无刷直流电机自适应模糊控制方法的专利申请,设计了一种直接转矩自适应模糊控制器,能够根据不同的运行状况自适应地确定对应电压空间矢量的作用时间,从而自适应地调整电机的转矩,改善无刷直流电机调速系统的动态性能,同时能够抑制无刷直流电机的转矩脉动现象。此外,本发明利用多目标克隆选择算法来自动确定直接转矩模糊控制器的结构和参数,具有较强的通用性。该专利申请虽然能够实现对无刷直流电机的控制,但该专利申请为通用方法,不适用于双无刷直流电机驱动装置的控制,用于双无刷电机的控制时仍存在精度低、响应慢的问题。
技术实现思路
1、为了克服上述现有技术中存在的问题,本发明的目的在于提供一种电动汽车双无刷直流电机驱动装置及控制方法。在传统单电机驱动装置的基础上升级为双电机驱动装置。在传统的六扇区电机直接转矩控制系统基础上,将磁链圆的六个扇区重新设计均分为五个扇区,并且两个电机使用不同的五扇区划分方式,能够使系统启动和变载荷时具有较大的输出力矩。同时将两个电机公共桥臂所输入的电压矢量进行或运算,将得到的或运算信号输入到五桥臂逆变器,其他桥臂信号保持不变直接输入,能够实现对两台无刷直流电机的五扇区直接转矩控制,减少了算法的执行时间,实现高精度、快响应的控制。
2、为实现上述目的,本发明采用的技术方案是:
3、一种电动汽车双无刷直流电机驱动装置,包括:转速比较器、转矩比较器、磁链比较器、pi调节器、转速计算器、转速调节器、转矩与磁链观测器、转矩滞环控制器、磁链滞环控制器、开关矢量表模块、五桥臂逆变器和无刷直流电机;
4、所述无刷直流电机包括第一无刷直流电机bldc1和第二无刷直流电机bldc2;所述无刷直流电机与五桥臂逆变器连接;
5、所述转矩与磁链观测器的输入端与无刷直流电机连接,通过采集无刷直流电机的三相电压并得到无刷直流电机的当前磁链和当前转矩,所述转矩与磁链观测器的输出端分别连接磁链比较器的输入端和转矩比较器的输入端;
6、所述转速计算器的输入端与无刷直流电机连接,用于计算无刷直流电机的实际转速,所述转速计算器的输出端连接所述第一pi调节器的输入端;
7、所述转速比较器用于计算给定转速与实际转速的速度偏差,所述转速比较器的输出端连接所述第一pi调节器;
8、所述第一pi调节器用于根据速度偏差计算得到参考电流,所述第一pi调节器的输出端连接所述转矩滞环控制器;
9、所述转速调节器用于根据参考电流计算出参考转矩,所述转速调节器的输出端连接所述转矩比较器;
10、所述转矩比较器用于根据参考转矩和当前转矩计算出转矩偏差,所述转矩比较器的输出端连接所述转矩滞环控制器;
11、所述转矩滞环控制器用于根据转矩偏差计算出生成调节信号,所述转矩滞环控制器的输出端连接所述开关矢量表模块;
12、所述磁链比较器用于计算当前磁链和当前磁链的偏差,所述磁链比较器的输出端连接所述磁链滞环控制器;
13、所述磁链滞环控制器用于将根据前磁链和当前磁链的偏差生成调节信号,所述磁链滞环控制器的输出端连接所述开关矢量表模块;
14、所述开关矢量表模块的输出端连接所述五桥臂逆变器,所述开关矢量表模块用于根据转矩滞环控制器的调节信号和磁链滞环控制器的调节信号得到五位逆变器控制信号。
15、所述的一种电动汽车双无刷直流电机驱动装置的控制方法,包括以下步骤:
16、s1:将无刷直流电机的给定转速与实际转速的速度偏差输入pi调节器,得到参考电流,由参考电流计算得到参考转矩;通过第一无刷直流电机bldc1和第二无刷直流电机bldc2的相电流与相电压,分别计算得到第一无刷直流电机bldc1和第二无刷直流电机bldc2的磁链幅值、磁链角和当前转矩;
17、s2:通过给定的常值参考磁链幅值和电机的磁链幅值计算出磁链偏差,并将磁链偏差作为磁链滞环控制器的输入,得到磁链滞环控制器的输出值;将参考转矩和电机的当前转矩计算出转矩偏差,将转矩偏差作为转矩滞环控制器的输入,得到转矩滞环控制器的输出值;
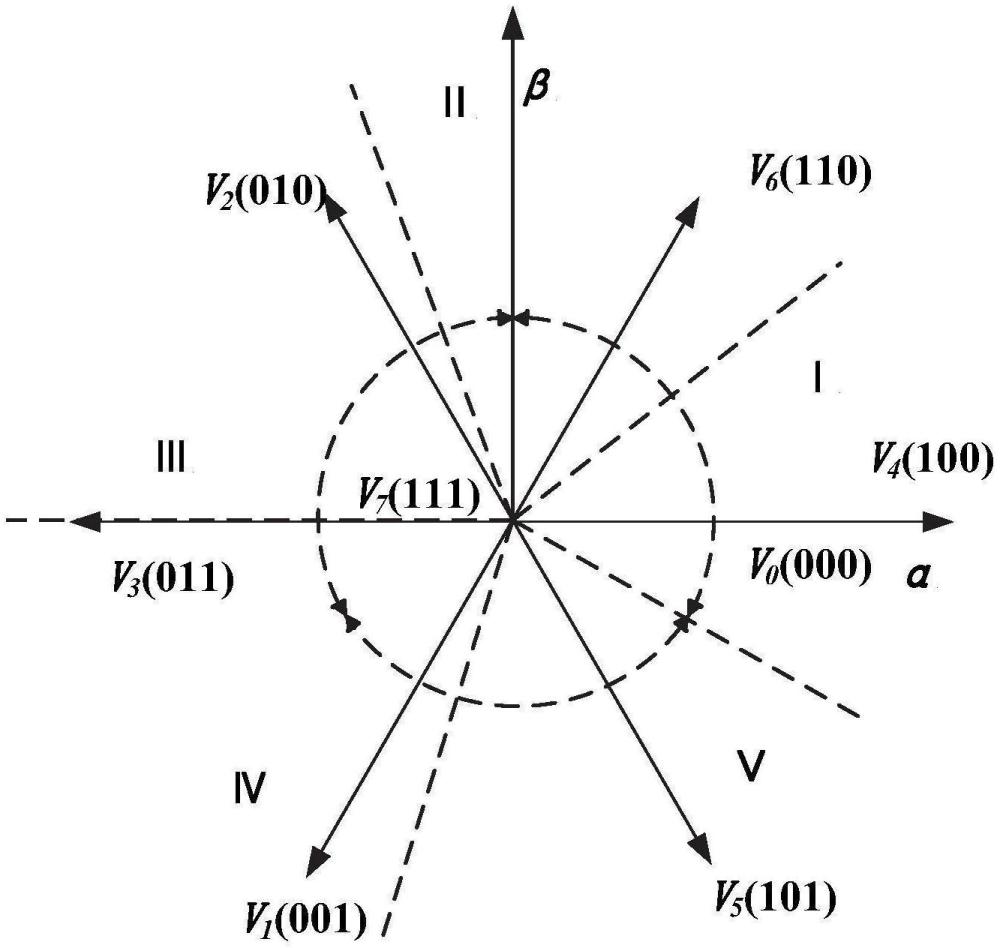
18、s3:将直接转矩控制系统的磁链圆分为五个扇区,根据电机的磁链角确定磁链矢量扇区号n;
19、s4:根据磁链矢量扇区号n、转矩滞环控制器输出值、滞环控制器输出值得到驱动五桥臂逆变器功率开关的两个三位的电压矢量;同时对公共桥臂电压矢量进行或运算后,得到五位逆变器控制信号,将五位逆变器控制信号输入至五桥臂逆变器。
20、可选的,步骤s3中,将所述五扇区直接转矩控制系统的磁链圆分为扇区i、扇区ⅱ、扇区ⅲ、扇区ⅳ和扇区ⅴ,其中第一无刷直流电机bldc1的扇区划分为扇区i的角度为扇区ⅱ的角度为扇区ⅲ的角度为扇区ⅳ的角度为扇区ⅴ的角度为第二无刷直流电机bldc2的扇区划分为扇区i的角度为扇区ⅱ的角度为扇区ⅲ的角度为扇区ⅳ的角度为扇区ⅴ的角度为
21、可选的,根据五桥臂逆变器的开关状态合成的电压矢量v0(000)、v1(001)、v2(010)、v3(011)、v4(100)、v5(101)、v6(110)、v7(111);所述第一无刷直流电机bldc1的扇区i包含电压矢量v4、v6,扇区ⅱ包含电压矢量v2,扇区ⅲ包含电压矢量v3,扇区ⅳ包含电压矢量v1,扇区ⅴ包含电压矢量v5;第二无刷直流电机bldc2的扇区i包含电压矢量v4,扇区ⅱ包含电压矢量v6,扇区ⅲ包含电压矢量v2、v3,扇区ⅳ包含电压矢量v1,扇区ⅴ包含电压矢量v5。
22、可选的,步骤s1中,参考电流i*的计算公式为:
23、i*=kp×eω+ki×∫eωdt
24、其中,kp为比例常值系数,ki为积分常值系数,eω为速度偏差。
25、可选的,步骤s1中,当前转矩的计算公式为:
26、
27、其中,ke为比例常值系数,i*为参考电流。
28、可选的,步骤s1中,磁链幅值磁链角θψs和当前转矩的计算公式为:
29、
30、其中,为磁链幅值,和为定子磁链;θψ为磁链角;为当前转矩,p为电机的磁极对数。
31、可选的,定子磁链和定子磁链的计算公式为:
32、
33、其中,iα和iβ分别为无刷直流电机的两相静止坐标系下的电流,vα和vβ分别为无刷直流电机的两相静止坐标系下的电压,r为无刷直流电机的定子电阻。
34、与现有技术相比,本发明具有以下有益效果:
35、本发明对参考转矩和计算转矩的偏差调节,输出转矩控制量,并对参考转矩和计算转矩的偏差完成调节,输出磁链控制量;两滞环控制器的输出控制量和转矩与磁链观测器计算出磁链角所在的扇区号作为开关矢量选择表的输入,通过查询简化后得到开关矢量表的两个电压矢量,同时对公共桥臂电压矢量进行或运算后,得到逆变器开关控制信号,进而实现对两个电机的独立控制。
36、本发明将直流转矩系统的六扇区分区方式改为五个扇区,重新制定独立的五扇区控制开关矢量表用以控制两台无刷直流电机。能够有效简化开关矢量表,在保证精准性基本不变的基础上进一步精简了直接转矩的控制算法结构,使系统运行更快,反应更加灵敏,提高了系统响应速度并且在系统启动和变载荷时具有较大的输出力矩。
- 还没有人留言评论。精彩留言会获得点赞!