一种除冰机器人
本发明涉及高压线除冰,尤其涉及一种除冰机器人。
背景技术:
1、由于我国地域辽阔,各方能量需求和供应各不相同,为了能够合理使用电能,我国的远距离高压输电技术飞速发展,输电线路不断扩展,随之而来的就有一些问题,其中的高压线覆冰就是重要问题之一。为了降低高压线覆冰的危害,高压线除冰技术就随之而发展。
2、虽然现有方案具有如上的优势,但是现有方案的劣势在于:物理除冰就是通过橡胶棒、木棍等敲打,通过人力对高压线进行物理除冰,这样的效率不高,而且一般用于中压35kv及以下的线路,费时费力且效果不佳;机械除冰一般通过机械装置,通过机械力将线路上的冰块除去,主要有振动除冰法,滑轮铲刮法以及电磁除冰法,机械除冰法能耗较低,但是效率不佳,而且通常在高压线塔与塔之间都需要人工参与,这就给某些地方的除冰带来了极大的不便;热熔冰法就是通过电流将导线加热从而达到除冰的效果,主要有过电流融冰法、短路融冰法、直流融冰法这三种。热融冰法和机械除冰法相比,速度快,安全性高,但耗能大,而且使用受限严重,所以无法广泛适用;自然除冰法是不需要外界能量而是靠着自然力实现除冰的方法,譬如在高压线上安装阻雪环、平衡锤等,在覆冰达到一定的程度时,通过风力、重力等自然力作用使其自动脱落,这种方法比较简单,但无法可靠地实现除冰,因此亟须一种除冰机器人解决上述问题。
技术实现思路
1、本发明的目的是为了解决现有技术中存在物理除冰就是通过橡胶棒、木棍等敲打,通过人力对高压线进行物理除冰,这样的效率不高,而且一般用于中压35kv及以下的线路,费时费力且效果不佳;机械除冰一般通过机械装置,通过机械力将线路上的冰块除去,主要有振动除冰法,滑轮铲刮法以及电磁除冰法,机械除冰法能耗较低,但是效率不佳,而且通常在高压线塔与塔之间都需要人工参与,这就给某些地方的除冰带来了极大的不便;热熔冰法就是通过电流将导线加热从而达到除冰的效果,主要有过电流融冰法、短路融冰法、直流融冰法这三种。热融冰法和机械除冰法相比,速度快,安全性高,但耗能大,而且使用受限严重,所以无法广泛适用;自然除冰法是不需要外界能量而是靠着自然力实现除冰的方法,譬如在高压线上安装阻雪环、平衡锤等,在覆冰达到一定的程度时,通过风力、重力等自然力作用使其自动脱落,这种方法比较简单,但无法可靠地实现除冰的问题。
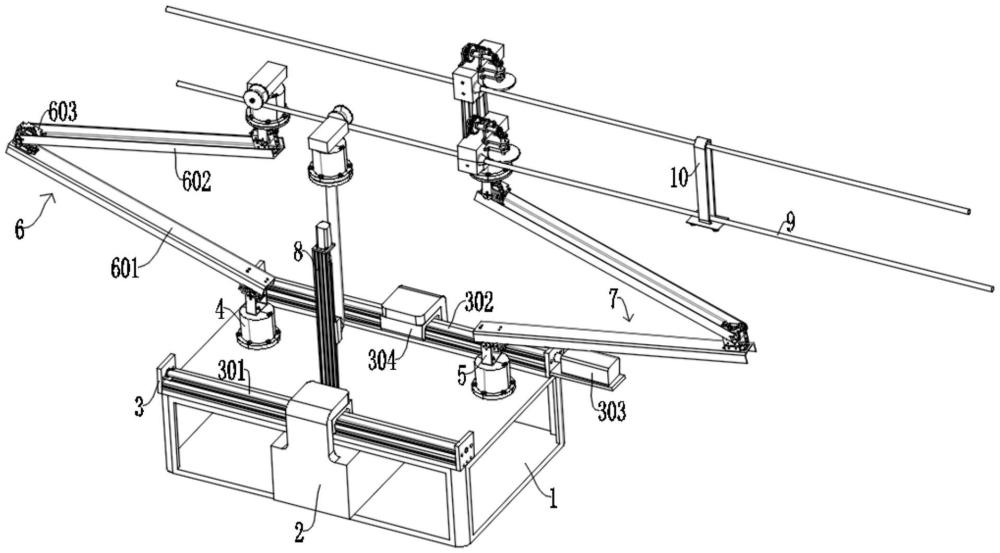
2、为了实现上述目的,本发明采用了如下技术方案:一种除冰机器人,包括:基座平台、机械臂组件一和机械臂组件二,所述机械臂组件一包含有下臂一、上臂一、中驱动设备一、下驱动设备一和上驱动设备一,所述机械臂组件二包含有下臂二、上臂二、中驱动设备二、下驱动设备二和上驱动设备二,还包括:
3、配电箱,设置在所述基座平台的内壁,所述基座平台的一端设置有两个滑动台;
4、导轨,设置在其中一个所述滑动台的一端,另一个所述滑动台的一端设置有螺纹杆一;
5、步进电机,设置在另一个所述滑动台的一端,两个所述滑动台的外表面均设置有滑动块。
6、优选的,其中一个所述滑动块的内壁螺纹设置在螺纹杆一的外表面,另一个所述滑动块的内壁滑动设置在导轨的外表面,两个所述滑动块的外表面分别设置在配电箱的外表面,所述下臂一的一端设置在中驱动设备一的外表面,所述下臂一的另一端设置在下驱动设备一的外表面,所述中驱动设备一的输出端设置在上臂一的一端。
7、采用上述进一步方案的技术效果是:配电箱为本除冰机器人供电,步进电机正反工作时带动螺纹杆一在滑动台内正反转动,螺纹杆一正反转动时带动滑动块进行往返移动,滑动块往返移动时带动配电箱和另一个滑动块在导轨上进行往返移动,便于调整配电箱在基座平台内的位置,有利于调节本除冰机器人的重心,使本除冰机器人保持平衡。
8、优选的,所述上臂一的另一端设置在上驱动设备一的外表面,所述下臂二的一端设置在中驱动设备二的外表面,所述下臂二的另一端设置在下驱动设备二的外表面,所述中驱动设备二的输出端设置在上臂二的一端,所述上臂二的另一端设置在上驱动设备二的外表面,所述基座平台远离滑动台的外表面设置有两个舵机云台一。
9、采用上述进一步方案的技术效果是:下驱动设备一和下驱动设备二工作时,分别带动下臂一和下臂二在下连接架上进行转动,便于调整下臂一的另一端的高度和下臂二另一端的高度,中驱动设备一和中驱动设备二在工作时,带动上臂一在中驱动设备一进行转动,带动上臂二在中驱动设备二上进行转动,便于调整上臂一和上臂二另一端的高度,上驱动设备一和上驱动设备二在工作时,带动上连接架一在上驱动设备一上进行转动,带动上连接架二在上驱动设备二上进行转动。
10、优选的,两个所述舵机云台一的输出端均设置有下连接架,其中一个所述下连接架的另一端设置在下驱动设备一的输出端,另一个所述下连接架的另一端设置在下驱动设备二的输出端,所述上驱动设备一的输出端设置有上连接架一,所述上连接架一的另一端设置有舵机云台二。
11、采用上述进一步方案的技术效果是:两个舵机云台一转动时带动两个下连接架进行转动,两个下连接架转动时分别带动下臂一、下驱动设备一、下臂二和下驱动设备二进行转动,下臂一转动时带动中驱动设备一、上臂一、上驱动设备一和上连接架一进行转动,下臂二转动时带动中驱动设备二、上臂二、上驱动设备二和上连接架二进行转动。
12、优选的,所述舵机云台二的输出端设置有驱动箱一,所述驱动箱一的输出端设置有主动轮一,所述主动轮一的外部设置有多个高压线,多个所述高压线的另一端设置有障碍物,所述基座平台的远离舵机云台一的外表面设置有固定块,所述固定块远离基座平台的一端设置有伺服电机。
13、采用上述进一步方案的技术效果是:上连接架一转动时带动舵机云台二进行转动,舵机云台二转动时带动驱动箱一进行转动,驱动箱一在转动时带动主动轮一进行转动,便于将主动轮一放置在其中一个高压线上。
14、优选的,所述伺服电机的输出端设置有螺纹杆二,所述螺纹杆二的两端设置在固定块的内壁,所述螺纹杆二的外表面螺纹设置有升降架,所述升降架的另一端设置有舵机云台四,所述舵机云台四的输出端设置有驱动箱三,所述驱动箱三的输出端设置有主动轮三,所述主动轮三的外表面设置在其中一个高压线的外表面。
15、采用上述进一步方案的技术效果是:固定块一端的伺服电机工作时带动螺纹杆二进行转动,螺纹杆二转动时带动升降架向高压线方向进行移动,升降架移动时带动舵机云台四进行移动,舵机云台四移动时带动驱动箱三和主动轮三进行转动,便于将主动轮三放置在其中一个高压线上,便于提高本除冰机器人与高压线的稳定性。
16、优选的,所述上驱动设备二的输出端设置有上连接架二,所述上连接架二的另一端设置有舵机云台三,所述舵机云台三的外部设置有两个驱动箱二,两个所述驱动箱二的输出端均设置有主动轮二,两个所述主动轮二的外表面设置在两个高压线的外表面,其中一个所述驱动箱二的外表面设置在舵机云台三的输出端。
17、采用上述进一步方案的技术效果是:上连接架二转动时带动舵机云台三进行转动,舵机云台三转动时带动其中一个驱动箱二进行转动,该驱动箱二转动时带动固定架和另一个驱动箱二进行转动,固定架在转动时带动两个升降块和两个辅助轮进行转动,两个驱动箱二在转动时带动两个主动轮二进行转动,便于将主动轮二放置在两个高压线上。
18、优选的,两个所述驱动箱二的外表面均设置有固定架,两个所述驱动箱二的内壁均设置有升降块,两个所述升降块的内壁均设置有辅助轮,两个所述辅助轮的外表面设置在多个高压线的外表面,多个所述高压线的外表面设置有多个加热块,多个所述加热块分别设置在两个驱动箱二的外表面和两个升降块的外表面。
19、采用上述进一步方案的技术效果是:将两个辅助轮移动至两个高压线的正下方,两个驱动箱二内的电动推杆工作带动两个升降块和辅助轮向高压线方向移动,便于辅助轮配合主动轮二分别将两个高压线进行夹持,便于增强本除冰机器人和高压线之间的稳定性。
20、优选的,两个所述驱动箱二的内壁设置有驱动齿轮,两个所述驱动齿轮的外表面啮合连接有传动结构,两个所述传动结构的外表面啮合连接有变速结构,两个所述变速结构的外表面啮合连接有转动结构,两个所述转动结构的一端设置有除冰轮。
21、采用上述进一步方案的技术效果是:两个驱动箱二在工作时内部驱动电机二带动驱动齿轮进行转动,驱动齿轮转动时带动传动结构在连接板一内进行转动,传动结构在转动时带动变速结构进行转动,变速结构转动时带动转动结构在连接板二内进行转动,转动结构转动时带动除冰轮进行转动,除冰轮转动时对高压线表面的冰块进行除冰工作。
22、优选的,两个所述变速结构的外表面均设置有两个连接板一,多个所述连接板一的另一端分别设置在两个驱动箱二的外表面,两个所述转动结构的外表面均设置有两个连接板二,多个所述连接板二的另一端分别设置在两个驱动箱二的外表面,两个所述传动结构的外表面分别设置在多个连接板一的内壁。
23、采用上述进一步方案的技术效果是:变速结构的外表面与连接板一的内壁轴承安装,便于增强变速结构转动时的稳定性,转动结构的外表面与连接板一的内壁轴承安装,便于增强转动结构转动时的稳定性,传动结构的外表面与连接板一的内壁轴承安装,便于增强传动结构转动时的稳定性。
24、与现有技术相比,本发明的优点和积极效果在于,
25、1、本发明,变速结构转动时带动转动结构在连接板二内进行转动,转动结构转动时带动除冰轮进行转动,除冰轮转动时对高压线表面的冰块进行除冰工作,但是除冰轮除冰后依旧会有残留的覆冰在高压线时,因此加热块工作时,有利于将高压线上残留的覆冰进行加热熔化,二次除冰将覆冰彻底清除,大大提高了本除冰机器人除冰的效果和能力。
26、2、本发明,通过机械臂组件一、机械臂组件二和升降架等结构依次工作,将主动轮一、主动轮二和主动轮三等结构依次越过障碍物后,再放置在高压线上,使得本除冰机器人在越障过程中始终保持稳定的悬挂在高压线上,有利于使本除冰机器人具有越障的功能。
27、3、本发明,螺纹杆一正反转动时带动滑动块进行往返移动,滑动块往返移动时带动配电箱和另一个滑动块在导轨上进行往返移动,便于调整配电箱在基座平台内的位置,有利于调节本除冰机器人的重心,使本除冰机器人保持平衡。
- 还没有人留言评论。精彩留言会获得点赞!