一种跟网控制器参数优化方法及装置与流程
本发明涉及电力系统自动化,尤其涉及一种跟网控制器参数优化方法及装置。
背景技术:
1、暂态稳定性是电力系统待解决的重要问题之一。分析电力系统的稳定性有助于确保电力系统安全高效地运行,而如果不对稳定性进行分析,就无法估计故障对稳定性的影响,系统可能会在意外的情况下失稳。此外,若在不分析系统稳定性的情况下确保系统稳定,则必须使系统的运行变得保守,从而降低效率。而随着社会经济和科技的快速发展,电力系统的规模日益扩大,可再生能源占比逐渐提升,同时电网中电力电子设备的数量不断增加,使得电力系统的稳定性问题愈发复杂。
2、现有的稳定性评估手段可分为非基于李亚普诺夫函数的方法和基于李亚普诺夫函数的方法。基于李雅普诺夫函数的方法致力于寻找故障后平衡点的一个稳定区域,若故障后系统的初始状态位于该稳定域内,就可以断言系统最终将收敛到平衡点。而基于平方和的方法是近十几年来提出的一种新兴算法工具,它可以系统地构建李亚普诺夫函数,并在考虑传递电导的电力系统模型中确定足够大的近似吸引域。然而吸引域估计的结果受系统向量场状况的影响较大,向量场中离平衡点较近的平衡面或不稳定平衡点可能会阻碍待估计吸引域的扩张,导致吸引域估计结果过于保守。
技术实现思路
1、为了解决上述技术问题,本发明实施例提供了一种跟网控制器参数优化方法及装置,通过对电网系统内的跟网控制器参数进行优化,提高跟网控制器作用于电力系统的吸引域估计效果。
2、本发明实施例的第一方面提供了一种跟网控制器参数优化方法,方法包括:
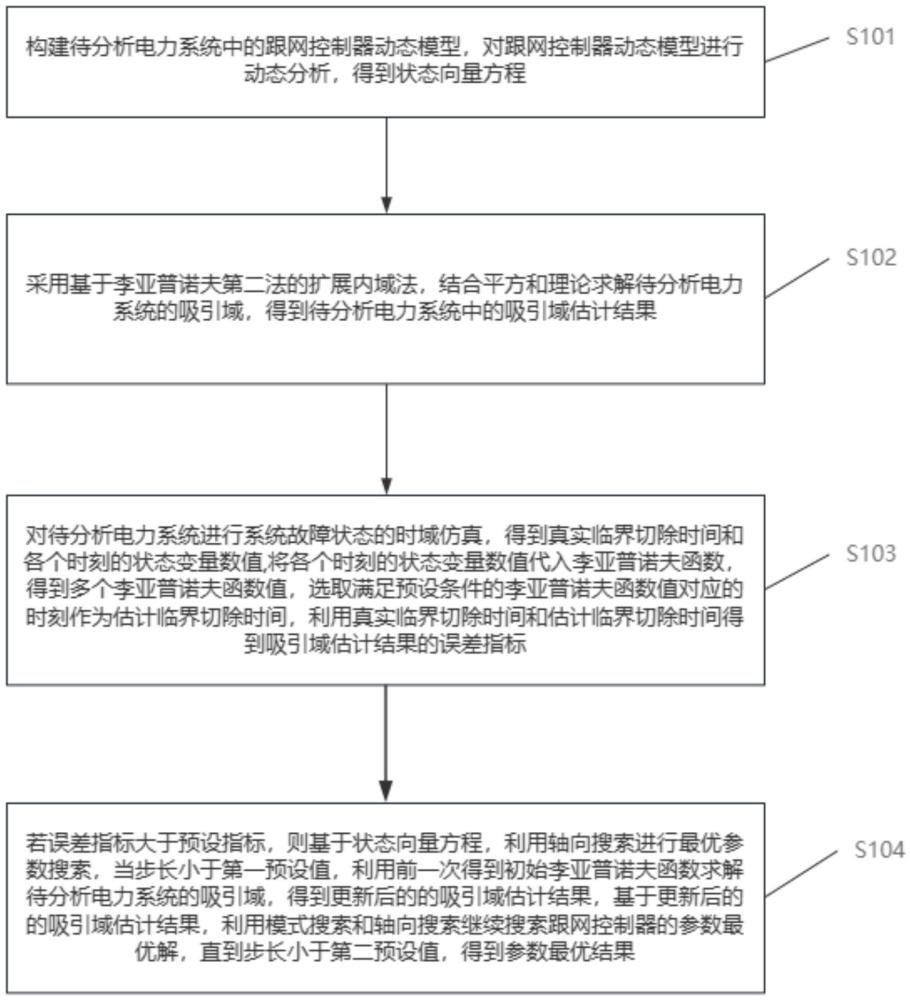
3、构建待分析电力系统中的跟网控制器动态模型,对跟网控制器动态模型进行动态分析,得到状态向量方程;
4、采用基于李亚普诺夫第二法的扩展内域法,结合平方和理论求解待分析电力系统的吸引域,得到待分析电力系统中的吸引域估计结果;
5、对待分析电力系统进行系统故障状态的时域仿真,得到真实临界切除时间和各个时刻的状态变量数值,将各个时刻的状态变量数值代入李亚普诺夫函数,得到多个李亚普诺夫函数值,选取满足预设条件的李亚普诺夫函数值对应的时刻作为估计临界切除时间,利用真实临界切除时间和估计临界切除时间得到吸引域估计结果的误差指标;
6、若误差指标大于预设指标,则基于状态向量方程,利用轴向搜索进行最优参数搜索,当步长小于第一预设值,利用前一次得到初始李亚普诺夫函数求解待分析电力系统的吸引域,得到更新后的的吸引域估计结果,基于更新后的的吸引域估计结果,利用模式搜索和轴向搜索继续搜索跟网控制器的参数最优解,直到步长小于第二预设值,得到参数最优结果。
7、在第一方面的一种可能的实现方式中,对跟网控制器动态模型进行动态分析,得到状态向量方程,包括:
8、对跟网控制器动态模型进行动态分析,得到在动态分析中跟网控制电源的状态向量方程组,状态向量方程组为:
9、
10、其中,δδc为控制器等效的相对相角,δδc=θpll-θref,为控制器等效的转速偏差,为系统参考同步发电机的转速偏差,为跟网控制电源接入电网的公共耦合点的q轴电压,fn为系统额定频率,为系统额定转速,kp和ki为跟网控制器可调参数。
11、参考同步发电机的状态向量方程为:
12、
13、其中,为参考同步发电机的相对转速,href为参考同步发电机转动惯量,为参考同步发电机阻尼系数,为参考同步发电机机械功率输入,为参考同步发电机电功率输出。
14、系统其余同步发电机的状态向量方程组为:
15、
16、其中,δi为同步发电机的相角,为同步发电机的相对转速,hi为同步发电机转动惯量,为同步发电机阻尼系数,为同步发电机机械功率输入,为同步发电机电功率输出。
17、在第一方面的一种可能的实现方式中,采用基于李亚普诺夫第二法的扩展内域法,结合平方和理论求解待分析电力系统的吸引域,得到待分析电力系统中的吸引域估计结果,包括:
18、设置循环结束的判据γ0:=0,i:=1,j:=1,选择初始李亚普诺夫函数,利用吸引域估计问题模型进行求解,其中,吸引域估计问题模型为:
19、find(v0,λ1,λ3,s2)
20、s.t.
21、
22、其中,是平方和多项式的集合,是n-1维多项式向量集合,g为系统模型去三角函数化过程中产生的等式约束,β是一个正数,r(z)为一个正定多项式,λ1、λ3为正点定理中对等式约束g附加的n-1维多项式变量,s2为正点定理中对不等式约束β-r(z)附加的平方和多项式变量;和为平方和多项式,
23、设置设置v(i)(z):=v(i-1)(z),γ:=γ(i-1),将吸引域估计问题转化第一平方和规划问题,得到第一平方和优化问题模型并进行求解,得到第一求解结果,其中,第一平方和优化问题为:
24、(sosp1)max c
25、s.t.
26、
27、其中,为平方和多项式的集合,为n-1维多项式向量集合,g为系统模型去三角函数化过程中产生的等式约束,β、c为正数,p是一个正定多项式,λ2、λ3为正点定理中对等式约束g附加的n-1维多项式变量,s1、s2、s3为正点定理中对不等式约束附加的平方和多项式变量,为平方和多项式,用于确保各约束条件半正定,
28、以第一求解结果为变量,将第一平方和规划问题转化第二平方和规划问题,得到第二平方和优化问题模型并进行求解,得到第二求解结果,其中,第二平方和优化问题模型为:
29、(sosp2)maxβ
30、s.t.
31、
32、其中,为平方和多项式的集合,为n-1维多项式向量集合,g为系统模型去三角函数化过程中产生的等式约束,β、c为正数,p为一个正定多项式,λ1、λ2、λ3为正点定理中对等式约束g附加的n-1维多项式变量,s1、s2、s3为正点定理中对不等式约束附加的平方和多项式变量,和为平方和多项式,用于确保各约束条件半正定,
33、将第二求解结果β和v(z)分别存储为β(i)和v(i)(z),若β(i)-β(i-1)<∈β,则若当j>1且和中系数的最大绝对值小于预设判据,则得到吸引域估计结果和当前李亚普诺夫函数,若否,则设置v(0)(z):=v(i)(z),p0(z):=v(i)(z),β(0):=c(i),i:=1,j=j+1,重新对第一平方和优化问题模型和第二平方和优化问题模型进行求解直到得到吸引域估计结果和李亚普诺夫函数;
34、若β(i)-β(i-1)>∈β,否将i=i+1,重新对第一平方和优化问题模型和第二平方和优化问题模型进行求解直到得到吸引域估计结果和李亚普诺夫函数。
35、在第一方面的一种可能的实现方式中,误差指标的计算公式为:
36、
37、其中,tref表示真实临界切除时间,tcal表示估计临界切除时间。
38、在第一方面的一种可能的实现方式中,利用轴向搜索进行最优参数搜索,包括:
39、沿kp方向搜索,若则令若则令否则令
40、沿ki方向搜索。则令若则令否则令其中,kp和ki为跟网控制器可调参数,d是轴向搜索的步长。
41、在第一方面的一种可能的实现方式中,利用模式搜索搜索跟网控制器的参数最优解,包括:
42、设置沿yk=xk-xk-1方向搜索,若δ(xk-αyk)<δ(yk),令xk+1=xk-αyk;否则,令xk+1=xk。
43、本发明实施例的第二方面提供了一种跟网控制器参数优化装置,装置包括:
44、构建模块,用于构建待分析电力系统中的跟网控制器动态模型,对跟网控制器动态模型进行动态分析,得到状态向量方程;
45、估计模块,用于采用基于李亚普诺夫第二法的扩展内域法,结合平方和理论求解待分析电力系统的吸引域,得到待分析电力系统中的吸引域估计结果;
46、误差确定模块,用于对待分析电力系统进行系统故障状态的时域仿真,得到真实临界切除时间和各个时刻的状态变量数值,将各个时刻的状态变量数值代入李亚普诺夫函数,得到多个李亚普诺夫函数值,选取满足预设条件的李亚普诺夫函数值对应的时刻作为估计临界切除时间,利用真实临界切除时间和估计临界切除时间得到吸引域估计结果的误差指标;
47、参数计算模块,用于若误差指标大于预设指标,则基于状态向量方程,利用轴向搜索进行最优参数搜索,当步长小于第一预设值,利用前一次得到初始李亚普诺夫函数求解待分析电力系统的吸引域,得到更新后的的吸引域估计结果,基于更新后的的吸引域估计结果,利用模式搜索和轴向搜索继续搜索跟网控制器的参数最优解,直到步长小于第二预设值,得到参数最优结果。
48、在第二方面的一种可能的实现方式中,对跟网控制器动态模型进行动态分析,得到状态向量方程,包括:
49、对跟网控制器动态模型进行动态分析,得到在动态分析中跟网控制电源的状态向量方程组,状态向量方程组为:
50、
51、其中,δδc为控制器等效的相对相角,δδc=θpll-θref,为控制器等效的转速偏差,为系统参考同步发电机的转速偏差,为跟网控制电源接入电网的公共耦合点的q轴电压,fn为系统额定频率,为系统额定转速,kp和ki为跟网控制器可调参数。
52、参考同步发电机的状态向量方程为:
53、
54、其中,为参考同步发电机的相对转速,href为参考同步发电机转动惯量,为参考同步发电机阻尼系数,为参考同步发电机机械功率输入,为参考同步发电机电功率输出。
55、系统其余同步发电机的状态向量方程组为:
56、
57、其中,δi为同步发电机的相角,为同步发电机的相对转速,hi为同步发电机转动惯量,为同步发电机阻尼系数,为同步发电机机械功率输入,为同步发电机电功率输出。
58、本发明实施例的第三方面提供了一种计算机设备,包括:
59、存储器,用于存储计算机程序;
60、处理器,用于执行所述计算机程序时实现如第一方面的跟网控制器参数优化方法。
61、本发明实施例的第四方面提供了一种存储介质,存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面的跟网控制器参数优化方法的步骤。
62、本发明实施例提供的通过构建待分析电力系统中的跟网控制器动态模型,对跟网控制器动态模型进行动态分析,得到状态向量方程,采用基于李亚普诺夫第二法的扩展内域法,结合平方和理论求解待分析电力系统的吸引域,得到待分析电力系统中的吸引域估计结果;对待分析电力系统进行系统故障状态的时域仿真,得到真实临界切除时间和各个时刻的状态变量数值,将各个时刻的状态变量数值代入李亚普诺夫函数,得到多个李亚普诺夫函数值,选取满足预设条件的李亚普诺夫函数值对应的时刻作为估计临界切除时间,利用真实临界切除时间和估计临界切除时间得到吸引域估计结果的误差指标;若误差指标大于预设指标,则基于状态向量方程,利用轴向搜索进行跟网控制器的参数最优解的搜索,当步长小于第一预设值,利用前一次得到初始李亚普诺夫函数求解待分析电力系统的吸引域,得到更新后的的吸引域估计结果,基于更新后的的吸引域估计结果,利用模式搜索和轴向搜索继续搜索跟网控制器的参数最优解,直到步长小于第二预设值,得到参数最优结果,本方法通过对电网系统内的跟网控制器参数进行优化,提高跟网控制器作用于电力系统的吸引域估计效果。
- 还没有人留言评论。精彩留言会获得点赞!