一种多逆变器并联改进无功下垂控制方法及系统与流程
本发明涉及逆变器运行调压,特别是一种多逆变器并联改进无功下垂控制方法及系统。
背景技术:
1、随着社会的快速发展,人们的生活水平也得快速发展与提升。电力系统作为社会的重要组成部分,其稳定性、可靠性是全球研究的重要课题。输出功率的均衡分配影响着逆变器的稳定性以及使用寿命。而在多个逆变器并联运行的系统中,控制负载的方式取决于各个逆变器的容量参数。因此,业内当前的研究重点在于对多逆变器并联系统运行于孤网模式下输出的功率合理均分。
2、多逆变器并联结构,设计灵活性较高,有助于根据需要进行容量扩充,同时单个逆变器也可以独立替换检修,设计复杂度以及建设成本也相对较小。然而并联结构也将由于等效线路阻抗不匹配而带来功率分布不均从而导致环流以及系统不稳定等问题。下垂控制采用的内部功率环和内部电压环、电流环,共同构成了多逆变器并联控制系统,其协同工作可有效抑制高频振荡和阻尼。但是,在传统的下垂控制方法中,电网电压的幅度波动和频率的不稳定性将不利于逆变器之间的功率分配均匀性,同时也减慢了系统的响应能力。
3、当多逆变器并联运行时,该方法能够有效地改善无功功率的均分程度,减少单个逆变器过负荷运行的出现,从而显著降低逆变桥功率器件的损耗。同时,该方法还能够改善系统电压跌落现象,提高多逆变器并联运行的稳定性。此前,张恒等在电工技术发表的改进下垂控制的逆变器并联运行研究中曾进行过在传统无功电压下垂方程的基础上添加积分环节,并将下垂系数修正为包含功率的一次函数的改进,并实现了一定的无功功率的均分以及系统电压跌落的改善。而本专利在此基础上,加入了sogi-pll预同步模块,从而减少多逆变器之间由于相位差异引起的环流以及过负荷。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有存在的问题,提出了本发明。
3、因此,本发明提供了一种多逆变器并联改进无功下垂控制方法及系统,能够解决背景技术中提到的问题。
4、为解决上述技术问题,本发明提供如下技术方案:
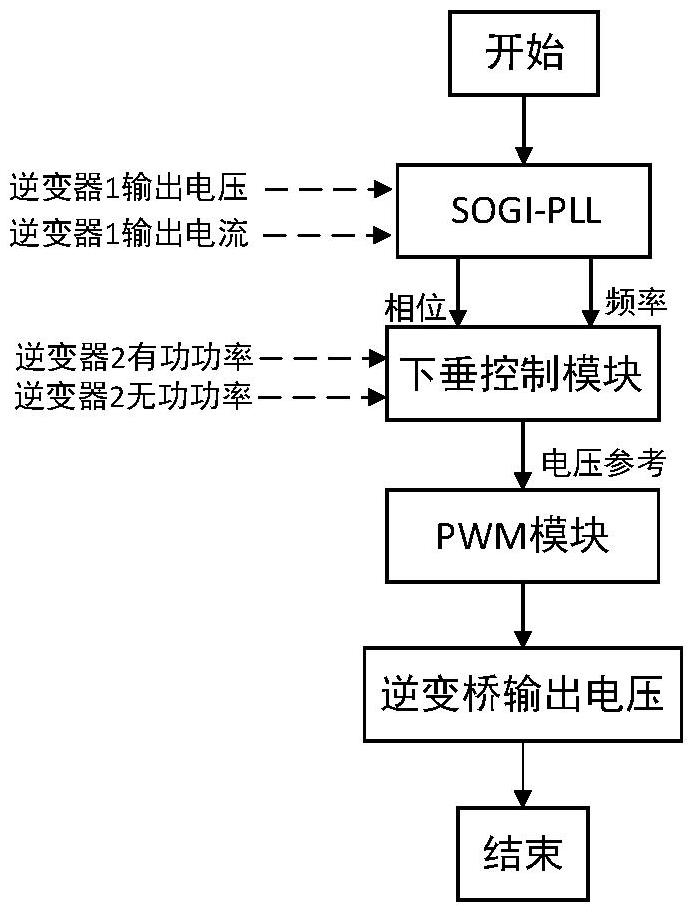
5、第一方面,本发明提供了一种多逆变器并联改进无功下垂控制方法,其包括,获取逆变器输出侧的第一数据,根据所述逆变器输出侧的第一数据计算实时输出的第二数据;
6、将所述第二数据通过下垂控制得到频率和电压的给定值,并根据所述电压的给定值通过电压电流双闭环控制得到pwm给定电压;
7、通过sogi-pll预同步实时采集逆变器1的相位,并作为逆变器2的相位输入。
8、作为本发明所述多逆变器并联改进无功下垂控制方法的一种优选方案,其中:所述第一数据包括电压数据、电流数据、温度数据、湿度数据、逆变器故障数据、电网频率数据以及逆变器输出谐波数据;
9、所述第二数据包括有功功率数据和无功功率数据;
10、计算实时输出的第二数据包括,
11、
12、其中,p、q分别为逆变器输出有功功率、无功功率,为功率因数角,x为线路电抗,u为逆变器输出电压,e为网侧电压;
13、引入环境参数补偿机制对所述实时输出的第二数据进行补偿,计算公式如下:
14、
15、
16、其中,pa为补偿后的有功功率,qa为补充后的无功功率,α为温度补偿系数,β为湿度补偿系数,t为温度,h为湿度。
17、作为本发明所述多逆变器并联改进无功下垂控制方法的一种优选方案,其中:所述计算实时输出的第二数据包括,
18、根据逆变器并联系统输出的功率表达式,测量输出功率的不均匀程度g(%),计算公式如下:
19、
20、其中,p1为逆变器1输出功率,p2为逆变器2输出功率,pn为系统额定功率。
21、作为本发明所述多逆变器并联改进无功下垂控制方法的一种优选方案,其中:所述得到电压和频率的给定值包括,
22、通过线路阻抗的阻感性得到下垂控制方程,当系统阻抗特性为阻性或阻感性时,下垂控制方程式由有功与无功功率均分公式组成,计算公式如下:
23、
24、其中,f、u分别为逆变器输出电压的频率、幅值,fn、un分别为逆变器输出电压的额定频率、幅值,m、n分别为逆变器有功频率下垂系数和无功电压下垂系数,pn、qn分别为逆变器额定有功功率和无功功率,p、q分别为逆变器输出有功功率、无功功率。
25、作为本发明所述多逆变器并联改进无功下垂控制方法的一种优选方案,其中:所述下垂控制通过调整发电机的输出功率来维持电网的频率和电压在预定的范围内;所述下垂控制的无功调压特性曲线中,采用以无功功率为变量的无功下垂系数变量来克服电压跌落问题。
26、作为本发明所述多逆变器并联改进无功下垂控制方法的一种优选方案,其中:所述pwm给定电压的计算公式如下:
27、
28、其中,vdref、vqref为pwm电压给定的dq轴分量,id、iq为输出电流dq轴分量,r和l为线路阻抗;
29、所述对pwm给定电压进行动态调整包括,
30、当系统启动时,设定能量存储系统的初始电压;
31、初始化控制算法参数;通过电压传感器获取当前实际电压,通过环境传感器获取当前温度和湿度,并根据系统需求或外部指令设定目标电压;
32、计算当前实际电压与目标电压之间的误差,得到电压误差;
33、根据当前温度与参考温度之间的差异乘以温度补偿系数,并根据当前湿度与参考湿度之间的差异乘以湿度补偿系数,同时将温度补偿值和湿度补偿值相加,得到环境总补偿值;
34、结合电压误差和环境总补偿值,调节能量存储系统;
35、若补偿后的电压误差为正值,增加能量存储系统的电压;
36、若补偿后的电压误差为负值,减少能量存储系统的电压;
37、将调整后的电压传递给pwm控制器,pwm控制器根据调整后的电压信号,调整pwm信号的占空比,以实现对负载或逆变器输出电压的精确控制。
38、作为本发明所述多逆变器并联改进无功下垂控制方法的一种优选方案,其中:所述采集逆变器1的相位包括,
39、将下垂控制单元输出的频率作为锁频环中sogi单元的输入谐振频率;
40、通过将锁频环计算得到的角频率补偿量加入有功功率-频率环节调节下垂控制单元输出频率ω,并将下垂控制单元和sogi-pll进行结合,生成一个闭环反馈;
41、将逆变器1输出电压uabc通过坐标系变换到dq0坐标系下分量ud和uq,再分别导入两个sogi-pll单元中;
42、采用逆变器1下垂控制单元有功功率-频率环节得到的频率作为sogi的谐振频率,并通过两个sogi-pll单元提取电压分量;
43、将角频率误差加入到逆变器2下垂控制单元的有功功率-频率环中,并调节下垂控制单元的输出频率和相位;
44、经过线路阻抗的固定差值,使逆变器2输出电压追踪逆变器1输出电压的频率、相位,完成控制。
45、第二方面,本发明提供了一种多逆变器并联改进无功下垂控制系统,其包括:数据采集计算模块、下垂控制模块和预同步相位控制模块;
46、所述数据采集计算模块用于获取逆变器输出侧的第一数据,根据所述逆变器输出侧的第一数据计算实时输出的第二数据;
47、所述下垂控制模块用于将所述第二数据通过下垂控制得到频率和电压的给定值,并根据所述电压的给定值通过电压电流双闭环控制得到pwm给定电压;
48、所述预同步相位控制模块用于通过sogi-pll预同步实时采集逆变器1的相位,并作为逆变器2的相位输入。
49、第三方面,本发明提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其中:所述处理器执行所述计算机程序时实现多逆变器并联改进无功下垂控制方法的步骤。
50、第四方面,本发明提供了一种计算机可读存储介质,其上存储有计算机程序,其中:所述计算机程序被处理器执行时实现多逆变器并联改进无功下垂控制方法的步骤。
51、与现有技术相比,本发明有益效果为通过修正无功下垂系数为包含功率的变量,使得逆变器在并联运行时能够更准确地分配无功功率,避免了某些逆变器承担过多或过少无功功率的问题,从而提高了系统的运行效率和稳定性。改进的无功下垂系数有助于平衡各个逆变器的负载,避免了单个逆变器过负荷运行的情况;这有助于延长设备的使用寿命,减少设备的损坏和维修频率;通过可变无功下垂系数的改进,系统电压的跌落现象得到了有效缓解。这有助于保持逆变器的输出电压稳定,减少电压波动对系统的影响,提高系统的电能质量。
- 还没有人留言评论。精彩留言会获得点赞!