驱动电机的控制方法、装置、驱动电机和存储介质与流程
本发明涉及驱动电机控制,尤其涉及一种驱动电机的控制方法、装置、驱动电机和存储介质。
背景技术:
1、目前,在现有的pmsm驱动电机中,为了实现精确的电机控制,通常采用svpwm(sinusoidalpulsewidthmodulation,正弦脉冲宽度调制)作为调制策略,通过生成一系列方波信号控制逆变器开关管的高速通断,以实现对电机的精确控制。
2、然而,在采用svpwm控制逆变器开关管的高速通断过程中,会产生谐波能量主要集中在开关周期及其整数倍的窄带内能量尖峰,这些尖峰通过线缆和电磁场对驱动电机本身以及外界电磁环境产生干扰,即电磁干扰(emi),现有方案为了降低emi干扰,目前普遍采用在电机三相线上附加磁环的方法,磁环能够有效地抑制高频干扰,但这种方法会增加系统的制造成本,并且影响系统的体积和重量。
技术实现思路
1、本发明的目的在于至少解决现有技术中存在的技术问题之一,提供一种驱动电机的控制方法、装置、驱动电机和存储介质,可以基于预设的抖动波形对电机目标转速进行抖动调整,以达到能量均摊的效果,从而在不附加磁环的情况下降低驱动电机的emi,节省硬件成本。
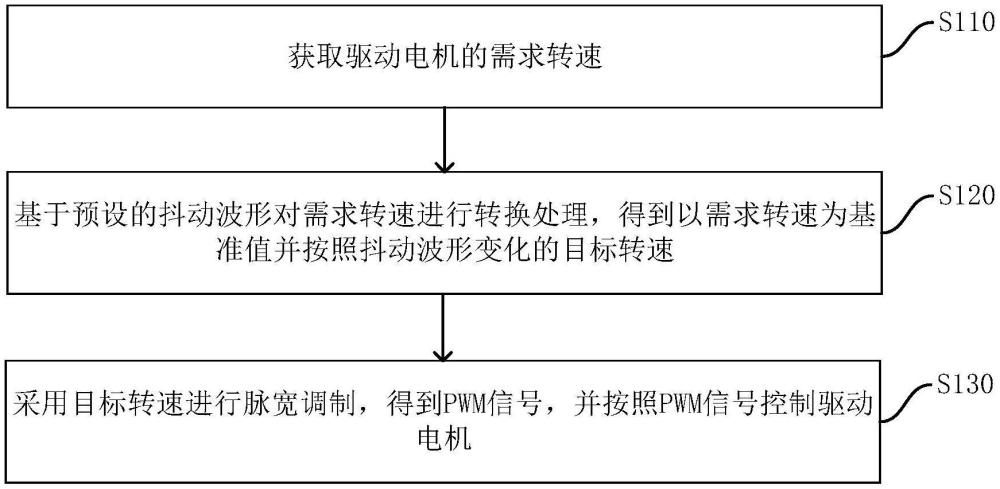
2、第一方面,本发明实施例提供一种驱动电机的控制方法,包括:获取所述驱动电机的需求转速;基于预设的抖动波形对所述需求转速进行转换处理,得到以所述需求转速为基准值并按照所述抖动波形变化的目标转速;采用所述目标转速进行脉宽调制,得到pwm信号,并按照所述pwm信号控制所述驱动电机。
3、根据本发明实施例提供的驱动电机的控制方法,至少具有如下有益效果:本技术通过确定驱动电机的需求转速,基于预设的抖动波形对需求转速进行转换处理,得到目标转速,并采用目标转速进行脉宽调制,生成pwm信号,进而根据pwm信号控制驱动电机,实现精确且稳定的电机控制;其中,可以理解的是,传统的svpwm控制策略通过逆变器开关管的高速通断产生方波信号,实现对电机的精确控制,但这种传统控制方式在开关过程中会产生能量尖峰,集中在开关频率及其整数倍的窄带内,导致emi问题,故为了解决上述问题,本技术方案引入了预设的抖动波形,该抖动波形是一种抖动变化的波形,其目的是在不改变电机平均转速的前提下,对目标转速进行抖动调整;进一步的,将电机的需求转速与抖动波形相结合得到目标转速,该目标转速以需求转速为基准值,按照抖动波形的变化进行调整,以使在采用调整后的目标转速进行脉宽调制,生成pwm信号时,pwm信号的占空比会根据目标转速的变化而变化,从而控制逆变器开关管的通断;可以想到的是,由于抖动波形的引入,原本集中在特定频率的能量尖峰被分散到更宽的频率范围内,使得每个频率点上的能量都相对较小,从而在根据pwm信号被用来控制驱动电机,实现对电机转速的精确控制时,可以有效降低电机整体的emi干扰。由于本技术方案通过软件控制的方式实现了emi的降低,无需在电机三相线上附加磁环,从而节省了硬件成本。
4、在一些实施例中,所述基于预设的抖动波形对所述需求转速进行转换处理,得到以所述需求转速为基准值并按照所述抖动波形变化的目标转速,包括:获取预设的抖动波形对应的转速抖动周期和转速抖动幅度;根据所述转速抖动周期和所述转速抖动幅度得到速度调整值;根据所述速度调整值对所述需求转速进行转换处理,得到以所述需求转速为基准值并随所述速度调整值变化的目标转速。
5、在一些实施例中,所述抖动波形为周期性波形,所述周期性波形包括正弦波和三角波。
6、在一些实施例中,所述周期性波形的转速抖动周期包括依次衔接的第一时段、第二时段、第三时段和第四时段,所述速度调整值在所述第一时段和所述第四时段中逐渐增大,在所述第二时段和所述第三时段中逐渐减小。
7、在一些实施例中,在所述第一时段中,所述目标转速从所述需求转速逐渐增大至第一转速;在所述第二时段中,所述目标转速从所述第一转速逐渐减小至所述需求转速;在所述第三时段中,所述目标转速从所述需求转速逐渐减小至第二转速;在所述第四时段中,所述目标转速从所述第二转速逐渐增大至所述需求转速。
8、在一些实施例中,所述第一时段、所述第二时段、所述第三时段以及所述第四时段中均包括多个电周期,每个所述电周期的调制波形对应的电周期峰值随所述目标转速增大而增大,并随所述目标转速减小而减小。
9、在一些实施例中,每个所述电周期的pwm波形对应的最大占空比随所述电周期峰值增大而增大,并随所述电周期峰值减小而减小。
10、在一些实施例中,在所述周期性波形为所述正弦波的情况下,所述根据所述转速抖动周期和所述转速抖动幅度得到速度调整值,包括:将所述转速抖动周期和所述转速抖动幅度代入速度调整值表达式,以得到所述速度调整值,其中,所述速度调整值表达式如下:其中,d(t)为当前时刻t的速度调整值,t为所述转速抖动周期,a为所述转速抖动幅度。
11、在一些实施例中,所述抖动波形的转速抖动周期和转速抖动幅度的确定过程包括以下方式:获取所述驱动电机的速度控制周期;根据所述速度控制周期和预设抖动次数确定所述抖动波形的转速抖动周期;根据所述转速抖动周期对应的转速抖动幅度阈值确定所述抖动波形的转速抖动幅度。
12、第二方面,本发明实施例提供一种运行控制装置,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面中任一项所述的驱动电机的控制方法。
13、根据本发明实施例提供的运行控制装置,至少具有如下有益效果:本技术通过基于运行控制装置执行驱动电机的控制方法确定电机需求转速,结合预设抖动波形转换得到目标转速,并用于脉宽调制生成pwm信号,实现精确稳定的电机控制,通过抖动波形调整目标转速,分散能量尖峰,减少emi干扰,且由于本技术方案通过软件控制的方式实现了emi的降低,故无需在电机三相线上附加磁环,从而节省了硬件成本。
14、第三方面,本发明实施例提供一种驱动电机,包括如第二方面中任一项所述的运行控制装置。
15、根据本发明实施例提供的驱动电机,至少具有如下有益效果:本技术通过基于驱动电机中运行控制装置执行驱动电机的控制方法确定电机需求转速,结合预设抖动波形转换得到目标转速,并用于脉宽调制生成pwm信号,实现精确稳定的电机控制,通过抖动波形调整目标转速,分散能量尖峰,减少emi干扰,且由于本技术方案通过软件控制的方式实现了emi的降低,故无需在电机三相线上附加磁环,从而节省了硬件成本。
16、第四方面,本发明实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如第一方面中任一项所述的驱动电机的控制方法。
17、根据本发明实施例提供的计算机可读存储介质,至少具有如下有益效果:本技术通过基于计算机可读存储介质执行驱动电机的控制方法确定电机需求转速,结合预设抖动波形转换得到目标转速,并用于脉宽调制生成pwm信号,实现精确稳定的电机控制,通过抖动波形调整目标转速,分散能量尖峰,减少emi干扰,且由于本技术方案通过软件控制的方式实现了emi的降低,故无需在电机三相线上附加磁环,从而节省了硬件成本。
- 还没有人留言评论。精彩留言会获得点赞!