一种电力巡检机器人的制作方法
本发明涉及电力巡检机器人领域,具体为一种电力巡检机器人。
背景技术:
1、电力巡检是指对电力线路及附属设备的运行状态以及对电力线路走廊周边环境状况进行及时和准确的巡视检测,通过排查发现故障点及危及电力安全的潜在隐患,确保输电线路安全可靠运行。一般情况下,输电线路采用的是高空架设的方式,具有减小人为破坏、降低维护成本、减小电力损耗等优点,传统的针对高空架设的输电线路的巡检方式为人工走线巡检,由巡检人员借助辅助工具对输电线路进行近距离巡视,劳动强度大,安全风险高,且对技术技能要求较高。
2、针对上述情况,巡检机器人应运而生,相关技术中,巡检机器人通过滚轮在输电线路上行走,并通过摄像头进行巡视,处理器处理巡视信息,并反馈巡检结果。但由于高空作业受环境因素的影响较大,跨度较长的输电线路在风的作用下会产生晃动,容易导致巡检机器人与输电线路脱离,发生侧翻,所以现有的巡检机器人多采用双线挂载式安装,但是这种安装方式受限于相邻的两根高压传输电线之间的间距,且不同路段的两股高压线之间的距离不同,而且还会存在单根电线上存在障碍的问题,所以应运而生了很多专用设备,导致了巡检机器人不同、不能匹配使用。
3、中国专利公开号:cn108879464b公开了一种微小型越障式电力巡检机器人,包括上下设置的驱动部件和吊挂部件,该驱动部件和吊挂部件之间间隔一段距离,该驱动部件的下端设有主动轮和越障轮,沿该机器人的行走方向,主动轮的位置与越障轮的位置错开;该驱动部件和吊挂部件通过连接臂(12)连接,沿主动轮的中心线方向,连接臂位于主动轮和越障轮的同一侧。该机器人不需要依靠自身机械结构越障,而是依靠越障桥越障,使得机器人本体结构简单、体积小巧、易于安装维护;在攀爬越障桥时,运行过程安全稳定可靠,是实现输电线路巡检机器人轻量化、产品化、实用化的关键性突破。
4、虽然该方案的越桥方式能够穿过输电线的障碍,但是此举需依靠输电线上安装有越障导轨,但是部分高压输电线上还安装有航空警示灯、防鸟刺、超声波驱鸟装置、各类监测装置等,所以在实际的巡检过程中,机器人还是难以穿过这些障碍,导致巡检机器人还是仅局限于输电线路的一段距离使用。
技术实现思路
1、针对现有技术的不足,本发明提供了一种电力巡检机器人,解决了以上背景技术中提出的问题。
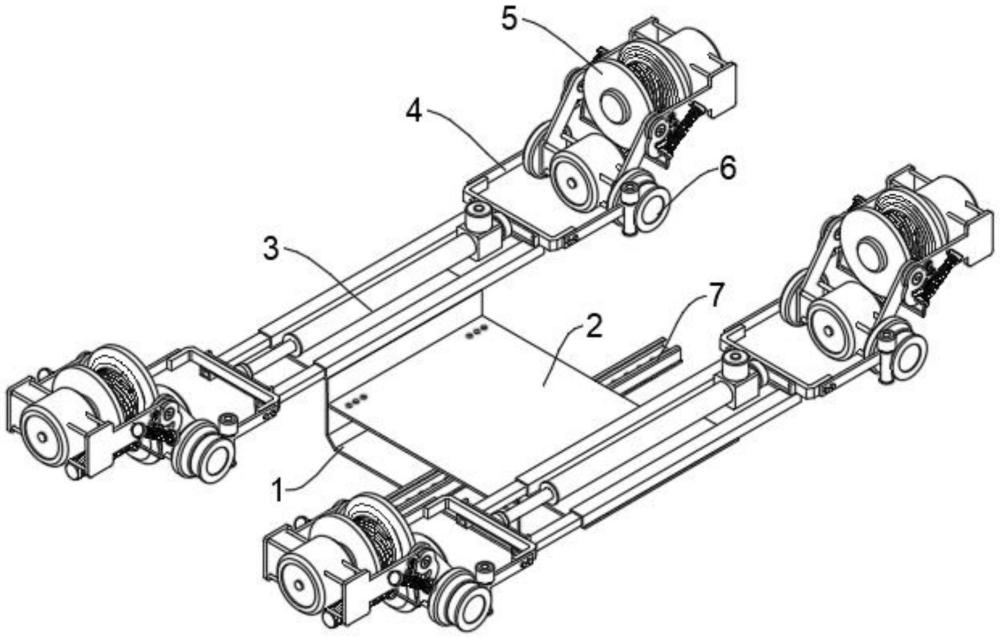
2、为实现以上目的,本发明通过以下技术方案予以实现:一种电力巡检机器人,包括u型机架和安装板,安装板固定安装在u型机架内,u型机架的两端均固定安装有伸缩组件,伸缩组件的两端均安装有固定叉,伸缩组件用于改变两个固定叉之间的距离,固定叉远离伸缩组件的一端内均安装有越障攀爬组件,固定叉上对应越障攀爬组件处固定安装有蜗轮驱动机,蜗轮驱动机的输出端与越障攀爬组件连接,用于使越障攀爬组件改变与固定叉之间的角度;
3、u型机架的内底壁处安装有导轨,导轨上安装有能够自主沿着导轨移动的配重块,配重块处于安装板的下方。
4、优选的,所述越障攀爬组件包括电机a,其输出端远离固定叉;
5、连接架a,设有两个,分别固定在电机a的两侧,连接架a与电机a连接的一端,处于固定叉内并与固定叉铰接,蜗轮驱动机的输出端与连接架a和固定叉的铰接轴连接;
6、电机b,电机b处于电机a远离固定叉的一侧上方,二者的输出轴相对设置;
7、连接架b,设有两个,分别固定在电机b的两侧,连接架b远离电机b的一端与连接架a远离电机a的一端互相铰接;
8、传动杆,与电机a的输出轴连接,其上开设有螺纹槽a;
9、工字轮,与电机b的输出轴连接,并处于传动杆的上方,其分为中间部和两个锥形部,中间部上设有若干螺纹槽b,若干螺纹槽b沿着中间部圆周阵列分布,锥形部的锥面上均固定安装有螺旋型凸起;
10、弹性监测部件,安装在连接架a和连接架b的铰接处,用于改变电机a与电机b之间的角度。
11、优选的,所述弹性监测部件包括芯轴,一端与连接架a固定,另一端贯穿连接架b并与其转动连接;
12、弧形板,一端套在芯轴贯穿连接架b的一端上并与其固定,另一端朝下延伸,弧形板与芯轴连接的一端侧面设有半圆槽;
13、弹簧,一端与弧形板远离芯轴的一端连接,另一端与连接架b的侧面连接,弹簧的两端分别能够相对弧形板和连接架b改变角度;
14、压板一端弹性铰接在连接架b的侧面上,压板远离连接架b的一端设有半圆形凸点,弧形板转动时半圆槽能够对应卡在半圆形凸点上,用于限位弧形板,压板远离连接架b的一端正面固定安装有销轴;
15、控制条,一端与连接架b铰接,另一端设有贯穿式的圆形通孔,圆形通孔套在销轴上;
16、l型杆,与控制条远离销轴的一端固定,l型杆的另一端延伸至工字轮和传动杆之间。
17、优选的,相对应的工字轮上的螺纹槽b与传动杆上的螺纹槽a螺纹方向相同,螺纹槽a和螺纹槽b的截面形状均为半圆形凹槽结构,螺旋型凸起的截面形状为半圆形凸起结构,与螺纹槽a和螺纹槽b的形状配合。
18、优选的,所述压板与连接架b的铰接处安装有扭簧,压板与连接架b的铰接处为圆形结构,弧形板与芯轴的连接处也为圆形结构。
19、优选的,所述l型杆倾斜设置,l型杆远离控制条的一端向电机a的一侧靠近,两个弹性监测部件的l型杆互相靠近的一端与工字轮轴心线的距离相同。
20、优选的,所述伸缩组件包括方管a、方管b、横板和电动推杆,方管a和方管b均设有两个,方管b的一端插接在方管a内并与其滑动连接,方管a与u型机架固定,电动推杆处于两个方管a之间并与u型机架固定,横板设有两个,其中一个与两个方管a远离u型机架的一端固定,另一个与两个方管b远离u型机架的一端固定,电动推杆的固定端和输出端分别固定在两个横板上,两个横板分别对应连接两个固定叉。
21、优选的,所述导轨与两个伸缩组件平行,并处于u型机架的中部位置,导轨的两端均越过u型机架,导轨上安装有驱动滑块,驱动滑块能够自主沿着导轨移动,配重块与驱动滑块连接。
22、与现有技术相比,本发明具备以下有益效果:
23、1、该电力巡检机器人,通过设置伸缩组件和越障攀爬组件,越障攀爬组件搭在电线上,电线穿过工字轮和传动杆之间,伸缩组件在伸展的时候可以改变两个越障攀爬组件之间的距离,从而可以适应不同距离的输电线,当其中一个输电线上存在障碍的时候,蜗轮驱动机改变越障攀爬组件的角度,利用螺纹槽a、螺纹槽b以及螺旋型凸起,实现线缆从工字轮和传动杆之间移出,越过障碍之后,蜗轮驱动机将越障攀爬组件甩到电线上,利用弹簧的反作用力,传动杆与工字轮重新恢复平行状态,此时电线被卡住无法脱离,另一侧的线缆出现障碍时同理,当两根电线上同时出现障碍的时候,需将前进一端伸缩组件上的两个越障攀爬组件脱离电线,后方驱动前进,越障攀爬组件穿过障碍之后,使前方的两个越障攀爬组件重新移到电线上,从而具备多种越障效果。
24、2、该电力巡检机器人,通过设置导轨和配重,当其中一个电线上的两个越障攀爬组件从电线上移下的时候可以改变配重的位置,使装置在一个电线上移动的时候依旧平稳,而当一端重新搭载在电线上的时候,也需要配重使其平衡,重回电线上。
25、3、该电力巡检机器人,设置电动推杆和蜗轮驱动机,蜗轮驱动机的运作始终配合电动推杆,或者电动推杆的运作配合蜗轮驱动机,二者动态配合运作,能够保持装置平衡的时候,实现变化多种动作,也可以动态配合两根不平行的输电线。
26、4、该电力巡检机器人,通过设置越障攀爬组件和蜗轮驱动机,当两个越障攀爬组件从一个电线上脱落的时候,另外两个蜗轮驱动机可以使装置反向并将脱落后的越障攀爬组件移动至另一电线上,从而可以在大于两根的平行电线上翻转移动,由此可以在电力巡检的时候,不仅可以沿着单根线缆移动,无需拆机的情况下还可以巡视两个输电塔之间的多根电线。
- 还没有人留言评论。精彩留言会获得点赞!