本发明属于电机控制,尤其涉及一种反电势观测器、大功率永磁同步电机控制装置及方法。
背景技术:
1、永磁同步电机凭借体积小、功率密度高、结构简单及调速性能好等优点成为变频调速电气传动系统的第一选择,被广泛应用于各行各业。近年来,大功率永磁同步电机及高速永磁同步电机的发展和应用在不断拓宽,永磁同步电机调速系统逐渐成为交流调速传动领域的研究热点,永磁同步电机根据其转子永磁体的结构不同,可以分为表贴式和内置式两种。
2、目前,永磁同步电机的高性能调速系统中,通常采用矢量控制方案,需要在电机轴一端安装编码器、旋转变压器或者霍尔传感器等检测装置来获取转子位置角度信息,安装检测装置在一定程度上使得系统成本增加、体积增大和可靠性降低。为了避免这些问题,永磁同步电机的无位置传感器控制技术成为永磁同步电机控制系统中的研究热点。现阶段永磁同步电机的无位置传感器控制技术在不同速度范围内有不同的控制方法,中高速区域内永磁同步电机的无位置传感器控制技术主要是通过反电势或磁链来观测转子位置信息,低速区域内永磁同步电机的无位置传感器控制技术主要通过电机的凸极特性获取转子位置信息。
3、永磁同步电机无位置传感器控制技术已经被广泛商用,实现了商业价值,但是这些应用场合工作在较高的开关频率和较小的控制周期中,变频器的开关频率与电机运行基频之比即载波比处于较大范围内,表现出优异的控制性能。但是,当永磁同步电机面临大功率或是高速应用场合时,受限于开关器件的损耗和主控芯片的控制性能,载波比必然会降低,低载波比工况下,双闭环矢量控制系统会面临数字控制延时影响、dq轴耦合加剧以及永磁同步电机数学模型不准确的问题,这些问题直接导致双闭环矢量控制系统控制性能降低,严重时造成控制系统不稳定现象。
4、为了解决载波比较低时永磁同步电机调速系统的严重交叉耦合所导致的电流环控制性能降低的问题,现有技术《大功率永磁同步电机低载波比电流预测控制系统及方法》提出一种电流pwm预测控制方法,虽然实现了大功率低载波比工况下的稳定运行,但是所提方法仅考虑到表贴式电机,并且需要额外硬件来获取电机转子位置,应用场景受限。
5、为了解决低载波比运行工况下,永磁同步电机控制系统中pi调节器解耦性能变差及控制延时增大导致的电流环性能变差甚至失稳的问题,现有技术《一种用于永磁同步电机的低载波比控制方法》设计了一种具备延时补偿功能且dq轴动态特性可调的电流调节器,虽然有效提高了低载波比工况下电机控制系统的稳定性,但是需要复杂的查表过程且仍需要额外硬件来获取电机转子位置。
6、因此,设计简单有效的方案来解决低载波比工况下永磁同步电机无位置传感器控制系统面临的问题,且同时适用于表贴和内嵌式永磁同步电机,是大功率永磁同步电机无位置传感器控制系统迫切要解决的问题。
技术实现思路
1、本发明的目的在于提供一种反电势观测器、大功率永磁同步电机控制装置及方法,用于解决大功率永磁同步电机无位置传感器控制系统在低载波比工况下面临数字控制延时影响、dq轴耦合加剧以及永磁同步电机数学模型不准确的问题。本发明通过采用帕德近似的方法对永磁同步电机反电势观测器系数矩阵进行改进,建立高阶的离散模型,同时针对采样电流计算后存在的均值误差导致位置观测不准确的问题,本发明设计补偿环节来减小位置观测误差,通过以上措施来保证大功率永磁同步电机在全速域范围的稳定运行。
2、本发明按以下技术方案实现:
3、第一方面,本发明提供了一种反电势观测器,所述反电势观测器通过帕德近似的方法对永磁同步电机反电势观测器系数矩阵进行改进;
4、改进后的反电势观测器,将dq坐标系下的电流信号、补偿后的电压参考信号和补偿后的电压参考信号转换为观测的反电势;
5、改进后的反电势观测器包括dq轴电流估算环节和dq轴反电势估算环节,所述dq轴电流估算环节,用于得到下一时刻dq坐标系下的观测电流信号矩阵,所述dq轴反电势估算环节,用于得到下一时刻dq坐标系下的观测反电势信号矩阵;
6、改进后的反电势观测器,表示为:
7、
8、其中,为观测的k+1时刻的dq轴电流值,为观测的k时刻的dq轴电流值,为观测的k+1时刻的dq轴反电势的值,为观测的k时刻的dq轴反电势的值,为k时刻的dq轴电压的参考值,idq(k)为k时刻电流传感器采集三相电流经过park变换后得到的dq轴电流值,矩阵g1、g2为与转速自适应的反馈增益矩阵,a、b为系数矩阵,i为单位矩阵,o为零矩阵,其中,系数矩阵a表示为:
9、a=ad1+ad2
10、其中,ad1是原系数矩阵中对角线上的常量系数矩阵经过一阶欧拉离散得到,ad2是原系数矩阵中反对角线上的转速耦合系数矩阵经过帕德近似得到;
11、
12、其中,
13、
14、
15、
16、系数矩阵b表示为:
17、
18、其中,ld、lq为永磁同步电机的dq轴电感,rs为永磁同步电机的定子电阻,ωe为电机电角速度,ts为控制程序的控制周期。
19、在一种实施方式中,通过直接在z域配置极点的方式来设置反馈增益系数矩阵,以保证观测器收敛,利用分块矩阵的代数性质,改进反电势观测器的特征多项式det(zi-a1+gl)表示为:
20、
21、令det(zi-a1+gl)=det((z-p1)(z-p2)i),根据系数匹配原则得到反馈增益矩阵的表达式为:
22、g1=(1-p1-p2)i+a、g2=(1-p1)(1-p2)i
23、其中,矩阵a为与转速相关的系数矩阵,配置极点在单位圆内即可保证观测器的稳定性。
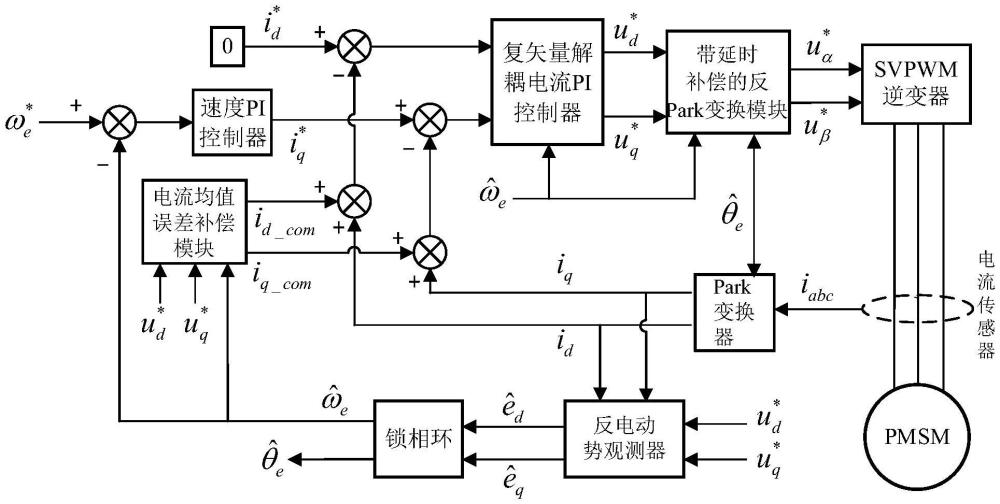
24、在一种实施方式中,该装置包括,park变换器、上述的反电势观测器、锁相环模块、电流pi控制器、速度pi控制器及带延时补偿的反park变换器;
25、所述park变换器的输入端分别与永磁同步电机uvw三相电流传感器的输出信号进行连接,所述park变换器的角度信号输入端与锁相环的角度输出端相连;所述park变换器的电流信号输出分为d轴电流信号id与q轴电流信号iq,dq轴电流信号与改进反电势观测器输入端相连;
26、所述反电势观测器输入端分别与电流pi控制器输出端和park变换器输出端相连,所述改进反电势观测器输出端与锁相环输入端相连;
27、所述锁相环的输出端估计转速与参考转速作差后与速度pi控制器输入端相连,所述锁相环的输出端估计转速与电流pi控制器和带延时补偿的反park变换输入端相连,所述锁相环的输出端估计转子位置角度与电流pi控制器、带延时补偿的反park变换和park变换的输入端相连;
28、所述电流pi控制器输出端与带延时补偿的反park变换输入端相连;
29、所述带延时补偿的反park变换输出端与svpwm逆变器的输入端相连。
30、在一种实施方式中,所述电流pi控制器为复矢量解耦电流pi控制器;所述复矢量解耦电流pi控制器包括d轴pi、d轴积分器、q轴积分器及q轴pi;d轴pi的比例系数为kp_id,积分系数为ki_id,q轴pi的比例系数为kp_iq,积分系数为ki_iq,d轴积分器的积分系数为kp_id与的乘积,q轴积分器的系数为kp_iq与的乘积,输出等于d轴pi的输出与d轴积分器的差值,输出等于q轴pi输出加上q轴积分器输出再加上与ψ的乘积,其中ψ为永磁体的磁链,为常值;
31、所述kp_id=ld*2π*fc,ki_id=rs*2π*fc,其中,ld为永磁同步电机的d轴电感,rs为永磁同步电机的定子电阻,fc为电流环带宽所设截止频率。
32、在一种实施方式中,所述带延时补偿的反park变换器的补偿函数表达为:
33、包含角度延时的补偿与幅值补偿,角度延时补偿为幅值补偿为为幅值补偿为,ts为本发明中程序控制周期,数值上与pwm开关周期相同,为电机转子的电角速度。
34、在一种实施方式中,所述基于无位置传感器的大功率永磁同步电机控制装置,还包括:电流均值误差补偿模块,其输入端分别与复矢量解耦电流pi控制器输出端和锁相环的输出端估计转速相连,其输出端与dq轴电流信号进行求和,将求和结果分别与参考电流做差后将差值连接到复矢量解耦电流pi控制器的输入端。
35、在一种实施方式中,电流均值误差补偿模块通过输入端的dq轴电压参考值和转子转速估计值经过计算得出dq轴补偿的电流值;电流均值误差补偿计算公式为:
36、
37、其中,idq_com为dq轴补偿的电流值,为dq轴电压的参考值,ts为控制周期,为电机转子转速估计值,
38、在一种实施方式中,所述锁相环包括四象限反正切函数、pi控制器及积分器;四象限反正切函数atan2用于计算出角度误差值角度误差值用于驱动锁相环,角度误差值通过pi控制器计算得出对进行积分得到电机转子位置角度pi控制器中的比例系数为kp_pll=2ξω0,积分系数为积分器中积分时间常数为ts,其中ξ为阻尼系数,为ω0锁相环带宽。
39、第二方面,本发明提供了一种基于上述的大功率永磁同步电机控制装置的控制方法,所述方法包括:
40、采集永磁同步电机uvw三相电流信号,经park变换器得到dq轴电流值idq;
41、改进反电势观测器中的dq轴电流估算环节根据dq轴电流值idq、电压的参考值k时刻的反电势估算值以及k时刻的dq轴电流预测值计算得出dq轴电流k+1时刻的预测值
42、改进反电势观测器中的dq轴反电势估算环节根据计算的dq轴电流下一时刻的预测值k时刻的dq轴电流预测值以及电压的参考值计算得出k+1时刻的反电势估算值
43、观测值通过锁相环获取估计的电机转子位置和速度
44、将dq轴电压的参考值和观测的转子转速信息作为电流均值误差补偿模块的输入,计算得出需要对电流调节环节补偿的电流值idq_com;
45、将转速估计值与参考转速作差,利用速度pi控制器得出q轴参考电流
46、对dq轴电流信号与dq轴电流信号补偿的电流值idq_com进行求和,再分别与参考电流做差后作为复矢量解耦电流pi控制器的输入,复矢量解耦电流pi控制器的经过计算得出dq轴的参考电压
47、根据dq轴参考电压转速估计值以及转子位置估计值带延时补偿的反park计算得出αβ轴的参考电压
48、svpwm根据αβ轴的参考电压进行计算后控制逆变器向电机输出三相电压,实现大功率永磁同步电机在全速域范围的稳定运行。
49、第三方面,本发明提供了一种大功率永磁同步电机控制系统,所述系统包括:上述的大功率永磁同步电机控制装置。
50、本发明有益效果:
51、(1)本发明使用高阶的离散系数矩阵,使得反电势观测器在低载波比工况下依然具有较好的性能,有效保证了永磁同步电机无位置传感器控制系统在低载波比工况的稳定运行,提高了控制性能。
52、(2)本发明使用了与转速相关的增益矩阵,使得观测器在更宽速度范围内都有良好的性能,提升了整个系统的控制性能。
53、(3)本发明使用了电流均值误差补偿环节,有效减小了采样电流均值误差导致的转子位置观测误差。
54、(4)本发明使用了复矢量解耦电流pi控制器,有效实现dq轴电流的解耦,实现方式简单,保证了电机在低载波比工况的具有较好的性能。
55、(5)本发明实现了通过简单有效的方案来解决低载波比工况下永磁同步电机无位置传感器控制系统面临的问题,且同时适用于表贴和内嵌式永磁同步电机。