接地线机械人的制作方法
本发明涉及电网检修领域,尤其涉及一种接地线机械人。
背景技术:
1、近年来,随着电网技术不断发展,配电线路的增加,线路的老化,同时需要检修的线路数量也随之增多,检修前需停电、验电、挂接地线。
2、人工挂接地线时前期需要准备较多的辅助工具,如:安全绳、安全帽、围闭网、安全标识、绝缘棒、接地导线、验电工具等等,还需作业人背着几十斤重的接地导线、验电工具爬上几十米高杆(塔),在爬塔的过程中存在高空坠落的风险。
3、绝缘斗臂车挂接地线时对场地要求高,如:狭窄的乡镇道路无法展开支撑腿,田间小路无法驶入,泥土松软的道路无法支撑绝缘斗臂车的重量,前期准备工作如同人工挂接地线一样繁琐。
4、另外还有采用现有无人机挂接地线,现验电工作已经有用到无人机验电。但是当无人机挂接地线时对飞手(遥控无人机的人员)有较高求,前期需带沉重接地夹头飞到导线上,再由作业人员通过绝绳把接地线慢慢拉扯上去,在拉扯接地线过程中存在以下问题:突然来电有可能发生触电风险,有可能会卡在半空拉不上去,无法判断是否对接到位。接地夹头的通过重力夹紧导线,夹紧力不够,存在接触面积不够的问题,并且需多次起飞挂接,操作不当存在坠机风险。
技术实现思路
1、本发明的目的是提供一种接地线机械人,挂设简便快速、安全可靠、易于搬运,具有良好的应用前景。
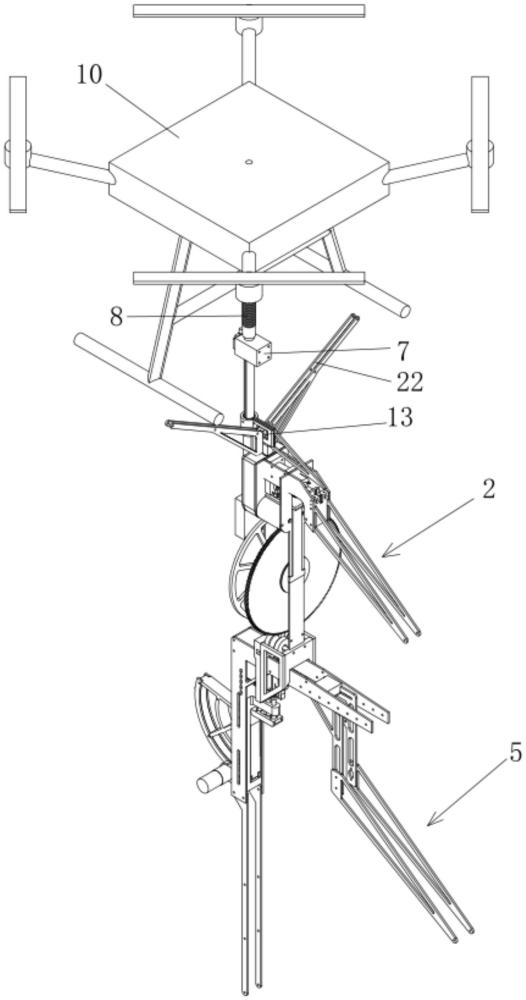
2、为实现上述目的,本发明提供一种接地线机械人,包括连接架、裸导线搭接装置和横担搭接装置,连接架上方设有无人机连接装置,连接架与裸导线搭接装置之间通过锁定结构可拆式连接;裸导线搭接装置上包括用于收放卷接地导线的收放卷机构,还包括用于与裸导线导电接触的裸导线夹紧机构,裸导线夹紧机构与接地导线的一端电性连接;接地导线另一端连接在横担搭接装置上,横担搭接装置上包括用于使接地导线与横担两者保持导电接触的横担夹紧装置。
3、作为本发明的进一步改进,还包括实时监控装置和万向阻尼器,实时监控装置安装在所述连接架上,万向阻尼器连接在无人机连接装置与连接架之间。
4、作为本发明的更进一步改进,所述连接架包括相互滑动套接的上杆体和下杆体;裸导线搭接装置包括第一支架,第一支架上连接有呈v形的连接环导向器,连接环导向器的底部设有连接环限位槽;所述锁定结构包括相适配的连接环和挂钩,连接环连接在下杆体上,挂钩转动连接在连接环限位槽一侧,挂钩联动有挂钩驱动装置。
5、作为本发明的更进一步改进,所述裸导线搭接装置的第一支架上设有开口朝下的裸导线限位槽,裸导线限位槽开口边缘设有斜向下延伸的裸导线导向器;所述裸导线夹紧机构包括两者相对布置的第一夹持部和第二夹持部,第一夹持部和第二夹持部两者分别位于裸导线限位槽的开口两侧;第一夹持部与第一支架滑动配合且螺纹连接有丝杆,丝杆联动有丝杆驱动装置;第二夹持部一端与第一支架转动连接,第二夹持部另一端与第一支架之间连接有第一弹簧。
6、作为本发明的更进一步改进,所述收放卷机构包括与第一支架转动连接的收放线轮,还包括与收放线轮相联动的收放线轮驱动装置;收放线轮通过导电结构与裸导线夹紧机构电性连接。
7、作为本发明的更进一步改进,所述导电结构包括两者相互转动接触的第三导电板和第二导电板,还包括与第二导电板电性连接的第一导电板,第三导电板固定连接在所述收放线轮上并与接地导线的一端电性连接,第二导电板固定设置在第一支架上,第一导电板与裸导线夹紧机构电性连接。
8、作为本发明的更进一步改进,所述第一支架底部连接有卡接框架,卡接框架上设有开口朝下的卡接口,卡接框架的卡接口与横担搭接装置相适配;卡接框架上设有至少一组放线辅助轮,所述接地导线从一组两个放线辅助轮之间穿过。
9、作为本发明的更进一步改进,所述横担搭接装置包括第二支架,第二支架与卡接框架的卡接口卡接配合;第二支架下方两侧分别连接有第一横担单向器和第二横担导向器,第一横担单向器和第二横担导向器两者之间构成横担导向槽;第二支架上设有接地导线固定部,接地导线固定部与接地导线的下部固定连接。
10、作为本发明的更进一步改进,所述横担夹紧装置包括两者相配合的第三夹持部和第四夹持部,第三夹持部位于横担导向槽内;接地导线下端固定连接在第三夹持部的夹持面上,横担夹紧装置还包括连接在第二支架上的固定座,第三夹持部上连接有导向杆,导向杆穿过固定座且两者滑动连接,固定座与第三夹持部之间设有第二弹簧;第四夹持部一端转动连接在第二支架上,第四夹持部联动有夹持部驱动装置。
11、作为本发明的更进一步改进,所述第二横担导向器上设有导向器安装部,第二支架与导向器安装部之间通过间距调节结构连接。
12、有益效果
13、与现有技术相比,本发明的接地线机械人的优点为:
14、1、操作时,通过无人机将接地线机械人整个吊起。无人机先将横担搭接装置搭在横担上,通过横担夹紧装置使接地导线下端与横担两者保持电性接触。然后裸导线搭接装置上的收放卷机构开始将接地导线向下放卷,同时无人机爬升,让裸导线搭接装置向上脱离横担搭接装置。接着无人机吊着连接架和裸导线搭接装置,移动至位于两个横担之间的裸导线上方,通过操作无人机让裸导线搭接装置搭在裸导线上并通过裸导线夹紧机构夹紧,此时裸导线、裸导线夹紧机构、接地导线、横担四者依次电性连接,横担接地。此时再解除连接架与裸导线搭接装置两者之间的锁定结构,无人机吊着连接架飞回底面。需要回收裸导线搭接装置和横担搭接装置时,让吊有连接架的无人机将上述结构重新回收即可。该方式只需飞手远程操控即可完成作业,可远距离作业,无需作业人员爬塔,避免出现裸导线突然通电带来的安全问题,而且无需人员拉扯接地导线,操作方便。
15、2、为了提高远程操作的精确度,通过实时监控装置将画面实时传输给飞手。而设置万向阻尼器,既避免了无人机整体与位于万向阻尼器下方结构的硬连接,减少无人机飞行时的晃动,同时利用阻尼作用也能让接地线机械人中位于万向阻尼器下方结构出现晃动时,能尽快消除晃动,确保无人机的飞行稳定性。
16、3、通过吊有连接架的无人机回收裸导线搭接装置时,操作无人机让连接环在呈v形的连接环导向器的导向作用下滑入连接环限位槽,该过程由于人眼和远程画面的限制,不能精确判断和控制无人机的姿态,如果使用固定结构的连接架,当连接环已顺利进入连接环限位槽而人员仍然向无人机发出下降的指令,则存在无人机因无法正常下降而侧倾的风险。为此,将连接架的上杆体和下杆体设计成能相对滑动的结构,使其存在一定的容错能力,然而更有利于无人机操作时的稳定性。
17、4、裸导线夹紧机构的第一夹持部与丝杆螺纹连接,具有自锁功能,避免出现意外后退的问题,确保了第一夹持部与第二夹持部对裸导线的夹持稳定性,不松动,以确保裸导线与第一夹持部之间有较高和较稳定的导电率。第二夹持部一侧设有第一弹簧,避免因夹持力过大导致裸导线表面出现破损。一旦裸导线表面破碎,局部电阻增大,长时间通电容易局部发热并造成裸导线寿命大幅缩短。
18、5、收放线轮通过收放线轮驱动装置驱动,可远程控制,操作方便。
19、6、裸导线搭接装置的第一支架底部通过卡接框架与横担搭接装置的第二支架卡接配合,避免飞行时横担搭接装置相对裸导线搭接装置出现晃动。
20、7、通过在横担搭接装置上设置第一横担单向器和第二横担导向器,可有效提高搭接横担时的成功率。
21、8、通过横担夹紧装置将横担和接地导线下端夹在一起时,通过设置第二弹簧,可避免因夹持力过大而损坏接地导线。
22、9、第二支架与导向器安装部之间通过间距调节结构连接,可根据需要搭接的横担的尺寸来预先调节第一横担单向器和第二横担导向器的间距,提高其通用性。
23、通过以下的描述并结合附图,本发明将变得更加清晰,这些附图用于解释本发明的实施例。
- 还没有人留言评论。精彩留言会获得点赞!