权重系数自适应优化的同步磁阻电机模型预测控制方法
权重系数自适应优化的同步磁阻电机模型预测控制方法,属于同步磁阻电机模型预测控制领域。
背景技术:
1、同步磁阻电机模型预测控制是一种先进的控制策略,它通过建立电机的精确数学模型,利用该模型预测未来状态,并通过优化算法寻找最优控制策略,实现对电机电流、速度或位置等状态变量的精确控制。这种控制方法考虑了电机的非线性特性和参数变化,旨在提高控制的准确性和鲁棒性,同时平衡控制器的实时性要求和计算量。
2、权重系数是同步磁阻电机模型预测控制的重要因素,权重系数的整定本质上是参数优化问题,为选择适合的权重系数:
3、文献1:颜黎明,郭鑫,赵冬冬.基于新型权重解析法的永磁电机预测转矩控制[j].航空学报,2022,43(12):486-497.基于电机系统电磁转矩、定子磁链和定子电流之间的内在关系,推导了代价函数中权重系数的解析表达式。
4、文献2:袁庆庆,步凡,谢晓彤,等.基于矢量分类的npc型三电平双三相pmsm的改进模型预测电压控制[j].中国电机工程学报,2024.通过电机数学模型和逆变器特征分析,计算满足中点电位平衡的权重系数限值,以满足电机电流的谐波抑制和中点电位平衡需求。
5、然而,以上解析法虽然可以直接推导出电机参数与权重系数的关系式,但存在对模型精度要求高、需要设置理想条件等限制。为解决上述问题:
6、文献3:sakamoto y,xu yihao,wang bingnan,et al.multi-objective motordesign optimization with physics-assisted neural network model[c].ieeeinternational electric machines&drives conference,2023:1-7.采用多目标平均等级排序方法将价值函数计算转换为等级值排序,从而避免了权重系数的选择。
7、文献4:李耀华,秦辉,苏锦仕.永磁同步电机模糊自适应变开关次数权重系数模型预测转矩控制[j].电机与控制学报,2021,25(02):102-112.将模糊理论引入模型预测控制,通过电机系统状态信息对价值函数中的权重系数数值进行实时调节。然而,上述方法计算步骤过于繁琐,极大增加了模型预测控制算法的在线运算负担。
8、同时在申请号为201611005682.0,申请日为2016年11月15日,专利名称为“双级矩阵变换器驱动的同步磁阻电机模型预测控制方法”的中国发明专利中公开了一种技术方案,在该技术方案中,以转矩、磁链、电流跟踪误差建立模型预测价值函数,尽管在电机性能中表现优异,但这会导致电机逆变器的开关频率过高。过高的开关频率导致逆变器中的开关元件频繁切换,增加了开关损耗,从而导致设备发热,影响系统的散热能力和组件寿命。在高频下,开关损耗显著增加,可能导致整体能效下降,尤其是在低负载或轻载情况下,效率损失更加明显。
9、申请号为202410646961.3,申请日为2024年5月23日,专利名称为“同步磁阻电机新型磁链观测器模型预测速度控制方法”的中国发明专利中公开了一种技术方案,在该技术方案中,在进行模型预测的价值函数的权重系数整定中,合适的权重系数整定缺乏系统化的方法,并且权重系数通常是静态设置的,而系统运行过程中可能存在动态变化,固定的权重无法适应系统状态的变化,影响控制效果。在多变量系统中,系统的非线性和耦合特性使得仅通过简单的权重调整难以实现预期的控制性能。不同的控制目标之间存在矛盾,难以通过单一的权重设置来平衡各个目标,导致性能下降。一旦设定了权重系数,后续的验证和调整可能需要较长的时间和大量的数据支持,增加了实施的难度。
10、综上所述,在现有技术的同步磁阻电机模型预测控制中,普遍存在如下缺陷:
11、(1)非线性问题:在不同的工作条件下,系统的动态特性会变化,固定的权重系数无法适应所有工作条件,导致控制性能下降。
12、(2)多目标优化困难:在需要同时优化多个性能指标(如转矩脉动,逆变器开关频率)时,权重系数的设置会导致某些目标被忽视或冲突,难以实现全局最优。
13、(3)缺乏系统化方法:通常缺乏系统化的权重系数整定方法,导致整定过程缺乏科学依据和标准化。权重系数的选择通常依赖于经验和试验,调整过程需要多次试验以找到最佳组合,耗时且不一定稳定。
技术实现思路
1、本发明要解决的技术问题是:克服现有技术的不足,提供一种设计了最小化价值函数,同时满足约束条件,在设计模型预测控制的价值函数时,考虑不同工作条件下的动态特性。动态更新权重系数,以适应系统在不同工况下的变化,从而提升控制性能的权重系数自适应优化的同步磁阻电机模型预测控制方法。
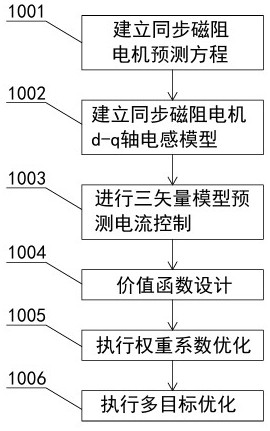
2、本发明解决其技术问题所采用的技术方案是:该权重系数自适应优化的同步磁阻电机模型预测控制方法,其特征在于:包括如下步骤:
3、步骤a,建立同步磁阻电机预测方程;
4、步骤b,建立同步磁阻电机d-q轴电感模型;
5、步骤c,进行三矢量模型预测电流控制;
6、步骤d,价值函数设计;
7、步骤e,采用布谷鸟算法执行权重系数优化;
8、步骤f,执行多目标优化。
9、优选的,在步骤d中,价值函数的表达式为:
10、e(i)=e1(i)+λe2(i)+e3(i)
11、
12、e2=(sa(k+1)-sa(k))+
13、(sb(k+1)-sb(k))+(sc(k+1)-sc(k))
14、
15、其中,λ为权重系数,f为k时刻与k+1时刻开关状态间的变化量之和,sa,sb,sc为两电平电压型三相逆变器的开关量的输出状态。目前,λ的设置一般靠工程经验数据获取,但随着电机控制的不断发展,以及电机实际运行中的复杂工况,需要设计更为精确的权重系数。tp为转矩脉动,tplim为转矩脉动设定上限。
16、优选的,转矩脉动tp的表达式为:
17、
18、其中,max(tp)为转矩脉动tp的最大值,min(tp)为转矩脉动tp的最小值,tavg为平均转矩。
19、优选的,步骤f包括如下步骤:
20、步骤f-1,初始化布谷鸟算法的鸟巢数量,步长,迭代次数,以及鸟巢被发现概率;
21、步骤f-2,计算鸟巢适应度值;
22、步骤f-3,判断是否达到终止次数,如果达到终止次数,执行步骤f-7,如果尚未达到终止次数,执行步骤f-4;
23、步骤f-4,记录并更新帕累托最优解集;
24、步骤f-5,更新布谷鸟算法的步长因子和发现概率;
25、步骤f-6,记录最有解下的权重系数值,并输出此时的电机转矩和逆变器开关次数。返回步骤1006-3。
26、步骤f-7,输出最终解集。
27、优选的,在步骤f-5中,步长因子的更新公式为:
28、
29、其中,α(t)为第t次迭代时α的值,tmax为迭代总次数,αmax和αmin为步长比例因子的上下限。
30、优选的,在步骤f-5中,发现概率的更新公式为:
31、
32、其中,为第t次迭代时发现概率的值,gp为发现概率学习因子,r为种群改善率。
33、优选的,在步骤f-2中,鸟巢适应度值的更新公式为:
34、fitness=βtp+f
35、其中,tp为转矩脉动,f为k时刻与k+1时刻开关状态间的变化量之和,β取值为100000。
36、与现有技术相比,本发明所具有的有益效果是:
37、在本权重系数自适应优化的同步磁阻电机模型预测控制方法中,设计了最小化价值函数,同时满足约束条件,在设计模型预测控制的价值函数时,考虑不同工作条件下的动态特性。动态更新权重系数,以适应系统在不同工况下的变化,从而提升控制性能。
38、在本权重系数自适应优化的同步磁阻电机模型预测控制方法中,将电流脉动和逆变器开关频率作为两个主要目标进行多目标优化。通过权重系数的动态调整,确保在优化过程中平衡各目标,避免某一目标被忽视或冲突,努力实现全局最优。
39、在本权重系数自适应优化的同步磁阻电机模型预测控制方法中,明确制定权重系数整定的标准化流程,包括初始范围设定、迭代准则和收敛条件。结合自适应布谷鸟算法,形成一套系统化的优化框架,确保整个过程具有科学依据和操作规范。采用自适应布谷鸟算法,通过智能算法搜索而非单纯依赖经验,减少人为试验次数。该方法自动调整权重系数,无需大量实验即可找到较优解。
40、在本权重系数自适应优化的同步磁阻电机模型预测控制方法中,提出了一种改进布谷鸟算法,通过自适应步长与发现概率,增加算法的搜索能力,避免陷入局部最优。在每个控制周期内,根据当前状态实时求解优化问题,通过数值优化算法获得最优控制输入。能够有效提升同步磁阻电机的控制性能,适应复杂工况,并实现高效、精确的控制效果。
41、在本权重系数自适应优化的同步磁阻电机模型预测控制方法中,根据同步磁阻电机的电气和机械特性,建立系统的状态空间模型,考虑同步磁阻电机的非线性特性,尤其是磁饱和对性能的影响。通过ansys软件建立电感-电流查询表,并进行电感参数辨识;在每个控制周期内,根据当前状态实时求解优化问题,通过数值优化算法获得最优控制输入,能够有效提升同步磁阻电机的控制性能,适应复杂工况,并实现高效、精确的控制效果。
- 还没有人留言评论。精彩留言会获得点赞!