一种防止偏轨的充电装置及其充电方法与流程
本技术涉及充电,尤其涉及一种防止偏轨的充电装置及其充电方法。
背景技术:
1、随着科技的发展,智能家居产品日益普及,尤其是轨道机器人作为提升居家生活便捷性的重要设备,受到越来越多消费者的青睐。轨道机器人通常用于自动开合窗帘,能够根据用户需求和环境光线进行调节,提供了良好的使用体验。然而,现有的轨道机器人在充电和运行过程中仍存在一些显著的缺陷,影响了其可靠性和用户体验。
2、许多现有的轨道机器人在设计上并没有充分考虑到充电过程中的定位问题。在充电时,轨道机器人需要与充电底座或充电轨道精准对接,以确保充电效率。然而,因其结构设计的不足,往往导致机器人在充电过程中位置偏移,进而造成接触不良,影响充电效果。偏轨现象不仅会增加充电时间,甚至在某些情况下可能导致轨道机器人无法完成充电,直接影响到其后续的正常使用,且由于导轨的形状限制,轨道机器人在运行过程中也容易受到导轨形状的影响,导致运行不顺畅,甚至出现卡顿现象。这些问题不仅影响了轨道机器人的性能,也降低了用户的使用体验。
技术实现思路
1、本技术的目的在于提供一种防止偏轨的充电装置及其充电方法,解决现有机器人在充电过程中容易偏轨的技术问题。
2、为达到此目的,本技术采用以下技术方案:
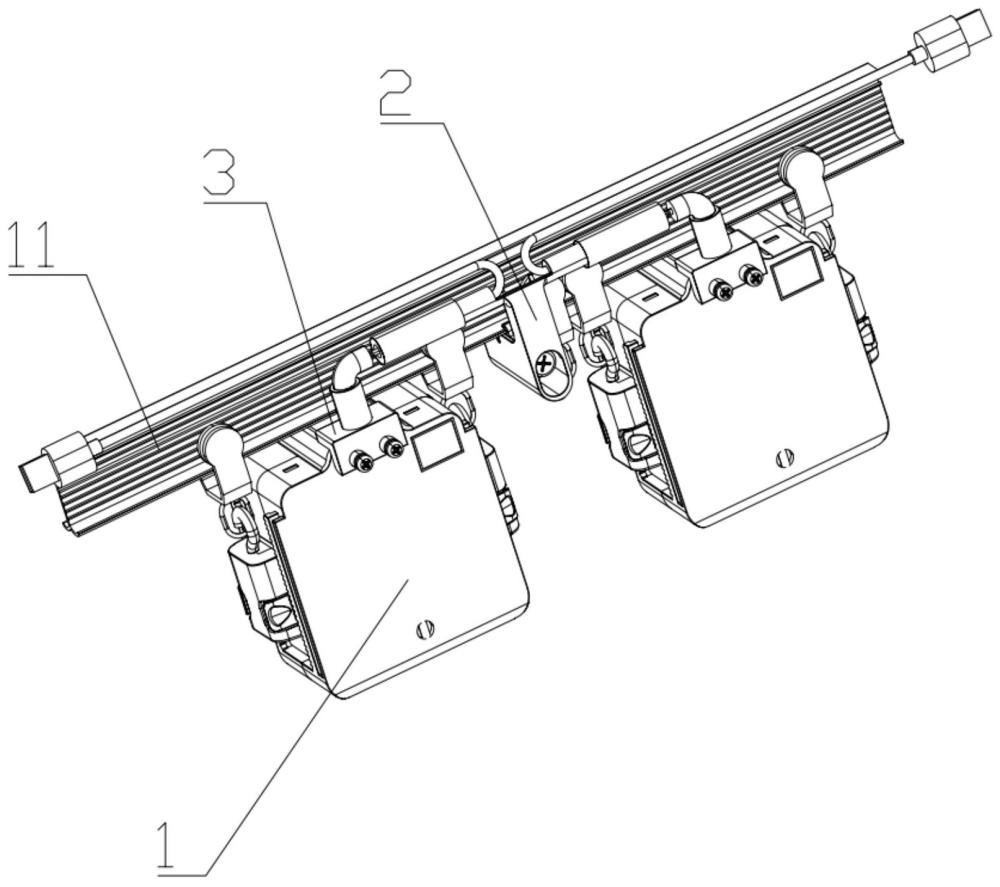
3、一种防止偏轨的充电装置,包括:
4、轨道机器人,包括滚轮,两个所述轨道机器人的滚轮与移动导轨的底面抵接;
5、固定结构,所述固定结构设置在两个所述轨道机器人之间,包括主体和设置于所述主体上的夹持机构,所述主体的第一端与所述移动导轨的底面抵接,所述主体的第二端设置有第一磁吸线;
6、限位结构,所述限位结构围绕所述滚轮设置在所述轨道机器人上,包括限位块和固定导柱,所述限位块设置在所述滚轮的周侧,所述固定导柱与所述限位块固定连接,用于抵住所述移动导轨的侧壁,以防止轨道机器人在充电过程中发生偏移,所述固定导柱内设置有用于与所述第一磁吸线磁吸连接的第二磁吸线,以使所述第一磁吸线与第二磁吸线(321)电性导通。
7、进一步地,所述主体的第二端的两端向所述轨道机器人的方向延伸设置有容纳腔,所述第一磁吸线设置在所述容纳腔内,所述第一磁吸线的第一端沿着所述移动导轨的方向延伸与电源连接,所述第一磁吸线的第二端设置在所述容纳腔内且向远离所述主体的方向延伸设置;
8、所述第一磁吸线的第二端上套设有弹性件,所述弹性件设置在所述容纳腔内且与所述第一磁吸线的第二端之间形成弹性连接,以使所述第二磁吸线与所述第一磁吸线磁性连接时提供缓冲。
9、进一步地,所述限位块的两侧为弧形结构,所述限位块的弧形两侧的内壁间隔预设距离与所述滚轮的外径相匹配,使所述限位块能够紧密地贴合在滚轮的周侧,从而限制轨道机器人的移动范围。
10、进一步地,所述固定导柱包括中空圆形结构和固定块,所述固定块与所述限位块固定连接,所述中空圆形结构设置在所述固定块的中间位置,所述固定块的内壁的中空部分与所述中空圆形结构相通,用于容纳所述第二磁吸线,所述第二磁吸线的一端与所述轨道机器人连接,另一端穿过所述固定导柱对应所述第一磁吸线的第二端设置,实现所述轨道机器人在所述移动导轨上的充电。
11、进一步地,所述夹持机构包括夹持部、第一连接部分和第二连接部分,所述夹持部和所述第一连接部分固定连接,所述第二连接部分设置在所述夹持部和第一连接部分的连接处,且向远离所述夹持部开口的方向延伸;
12、所述夹持机构包括第一状态和第二状态,当所述夹持机构为第一状态时,所述夹持部与移动导轨的外底面接触,两个所述夹持机构的第一连接部分通过连接件连接,形成闭合的夹持状态,以固定所述移动导轨;当所述夹持机构为第二状态时,所述夹持部与移动导轨的内底面接触,两个所述夹持机构的第一连接部分通过连接件连接,且两个所述夹持机构的第二连接部分相互接触,形成闭合的夹持状态,以固定所述移动导轨。
13、进一步地,所述连接件包括连接杆和连接套,所述连接套卡住一个所述第一连接部分,所述连接杆穿过两个所述夹持机构的第一连接部分与所述连接套连接,实现两个所述夹持机构的连接;
14、所述连接杆上套设有弹簧,以提供一定的弹性力,使所述夹持机构在夹持移动导轨时能够适应不同厚度的移动导轨。
15、进一步地,所述固定块的内壁的中空部分的两端间隔设置有若干个弹性臂,所述弹性臂与所述轨道机器人连接;
16、所述第二磁吸线对应所述第一磁吸线的第二端的一侧设置有导电接头,所述导电接头的外壁设置有半圆突柱,所述固定导柱的内壁设置有对应所述半圆突柱的半圆槽,所述半圆突柱与所述半圆槽配合,以实现所述第二磁吸线与所述固定导柱固定连接。
17、本技术还公开了一种充电方法,所述充电装置还包括位置传感器、电流检测模块和控制单元,用于实现上述任一项所述的防止偏轨的充电装置,包括:
18、基于所述位置传感器获取轨道机器人在所述移动导轨上的初始位置信息,所述初始位置信息包括所述轨道机器人在所述移动导轨上的坐标点;
19、基于所述控制单元将所述坐标点进行序列分解得到多个分量信息,每个所述分量信息为不同的移动方向上的坐标点;
20、根据所述分量信息获取所述轨道机器人的预定路径,控制所述轨道机器人沿所述移动导轨按照所述预定路径移动;
21、通过所述电流检测模块监测所述轨道机器人在移动过程中的电流变化,判断所述轨道机器人是否偏离预定路径;
22、当检测到所述轨道机器人偏离预定路径时,所述控制单元发出调整指令,调整所述轨道机器人的移动方向,使所述轨道机器人沿所述预定路径移动到指定位置进行对接充电。
23、进一步地,所述通过所述电流检测模块监测所述轨道机器人在移动过程中的电流变化,判断所述轨道机器人是否偏离预定路径的步骤,还包括:
24、基于所述电流检测模块获取所述轨道机器人在移动过程中的输出电流数据,并将所述输出电流数据添加时间标签形成时间序列;
25、将所述时间序列中相隔预设时间间隔的电流数据进行比较,获取电流变化值,判断所述电流变化值是否大于预设电流值;
26、若大于,则计算所述预设时间间隔内的电流值的均值和方差值,若所述电流值的均值持续偏离所述预设电流值,且所述方差值增加,则判定所述轨道机器人偏离预定路径。
27、进一步地,所述基于所述控制单元将所述坐标点进行序列分解得到多个分量信息,每个所述分量信息为不同的移动方向上的坐标点的步骤,包括:
28、通过傅里叶变换将所述坐标点的时间序列数据转换为频域数据,从而得到各个频率分量对应的坐标点信息;
29、对所述频域数据进行滤波处理,将滤波后的频域数据通过逆傅里叶变换转换回时域,得到经过优化处理的分量信息;
30、根据优化后的所述分量信息,计算所述轨道机器人在各个移动方向上的移动位置。
31、与现有技术相比,本技术具有以下有益效果:
32、本技术的防止偏轨的充电装置通过设置限位结构和固定结构,确保了轨道机器人在充电时与充电底座或充电轨道的精准对接,从而提高了充电效率和可靠性,限位结构的设置有效防止了轨道机器人在充电过程中的位置偏移,确保了充电过程的顺畅和稳定。因此,本技术的充电装置不仅提高了轨道机器人的充电效率和可靠性,还提升了用户的使用体验,在实际应用中,本技术的充电装置能够有效延长轨道机器人的工作时间,减少因充电问题导致的停机时间,从而提高了轨道机器人的使用效率。
- 还没有人留言评论。精彩留言会获得点赞!