一种基于无功补偿装置的电力系统混沌振荡控制方法及系统与流程
本发明涉及电力电子,具体为基于无功补偿装置的电力系统混沌振荡控制方法及系统。
背景技术:
1、我国是一个电力大国,随着用电规模的快速扩大,我国电网已然发展成为一个跨区域的大型乃至超大型互联网络。能源互联网概念的提出为促进我国可持续发展提供了新思路,为提高能源利用率、实现能源互补提供了新方法,能源互联网已成为未来我国电网的发展趋势。与此同时,能源互联网规模的扩大和电力负荷的不断增长为电网带来了严峻的挑战,现代电力系统稳定性问题将更加突出。电力系统一旦失稳,严重情况下引起的电压崩溃甚至系统解列会造成非常重大的经济损失,而这类事件在国内外电网中已经发生过多次,研究学者和工程人员们初期分析事故原因时普遍以为是系统负阻尼引起低频振荡继而导致电网失稳,但后来工程人员发现有些情况下,即使在实际中增加了阻尼,失稳现象仍然存在。
2、随着对电力系统研究的逐渐深入以及混沌学说的发展,学者们发现电力系统中存在着区别于负阻尼低频振荡但却拥有混沌特性的一类特殊振荡方式,即混沌振荡。作为一种非线性的动态行为,混沌振荡受到研究者的关注,许多电力系统失稳现象被发现与混沌振荡密切相关。混沌振荡会破坏电力系统稳定性,造成功角失稳、频率振荡和电压崩溃,甚至诱发大面积停电事故。因此,为了保障电力系统安全稳定运行,需要研究电力系统混沌振荡的控制方法。
3、为了抑制混沌振荡,避免电压崩溃,对电力系统进行补偿无功功率和阻尼是一种直接有效的方法,而传统的无功补偿方式在抑制混沌振荡方面效率较低。基于晶闸管半控型功率器件的静止无功补偿器(static var compensator,svc)和基于igbt、gto等全控型功率器件的静止同步补偿器(static synchronous compensator,statcom)是并联型无功补偿装置中的佼佼者,其无功补偿效果显著且效率极高,受到了研究学者和工程人员的青睐。
4、变结构滑模控制法是混沌控制重要基本方法,滑模变结构控制既可以应用于线性系统,也适用非线性系统,而混沌系统是典型的非线性系统,于是滑模变结构控制被引入混沌控制领域并得到快速发展。滑模变结构控制可以在趋近模态下驱动混沌系统运动点快速靠近滑模面并在滑动模态下使混沌系统脱离非周期轨道进入预期稳定状态。目前,滑模变结构控制因其优良特性和显著的控制效果,在电力系统混沌控制中应用十分广泛,但控制过程中滑模面附近出现的高频抖振依然是其固有缺陷,如何解决这一问题是更好实现混沌振荡控制的关键。
技术实现思路
1、本发明要解决的技术问题是提供基于无功补偿装置的电力系统混沌振荡控制方法及系统,以解决背景技术所述现有技术的不足。
2、为解决上述技术问题,本发明的实施例提供如下技术方案:
3、一种基于无功补偿装置的电力系统混沌振荡控制方法,包括以下步骤:
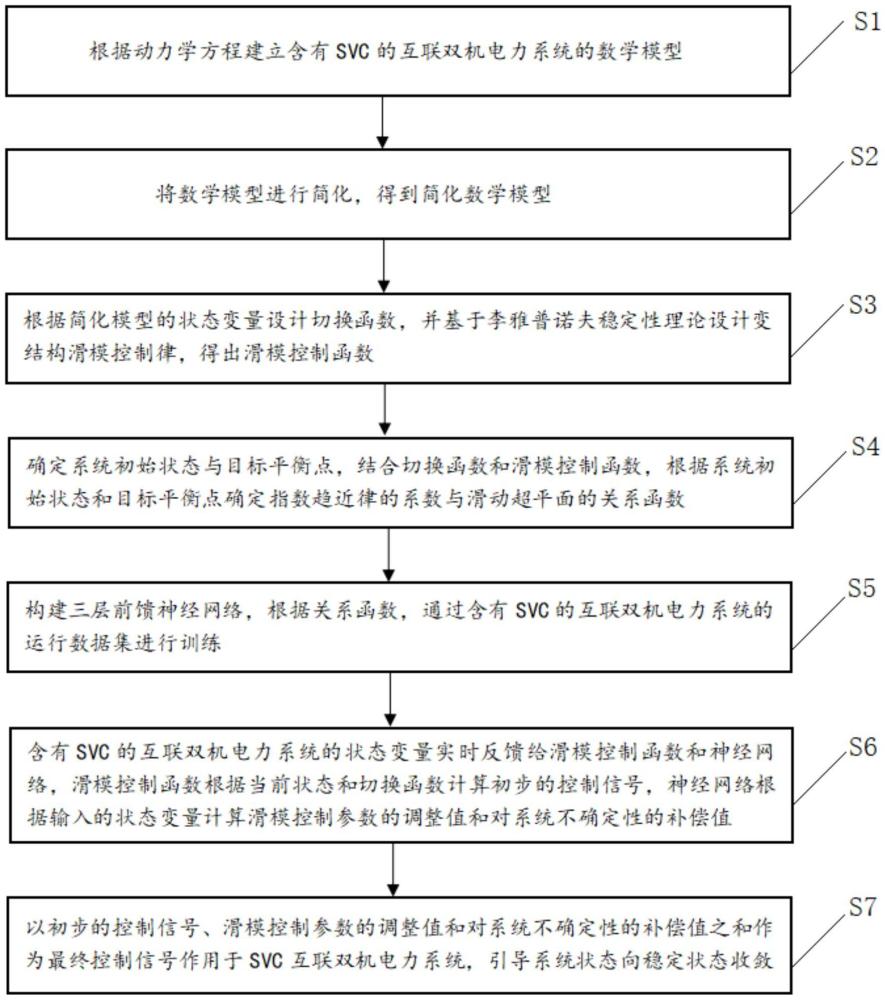
4、步骤1、根据动力学方程建立含有svc的互联双机电力系统的数学模型;
5、步骤2、将所述数学模型进行简化,得到简化数学模型;
6、步骤3、根据简化模型的状态变量设计切换函数,并基于李雅普诺夫稳定性理论设计变结构滑模控制律,得出滑模控制函数;
7、步骤4、确定系统初始状态与目标平衡点,结合所述切换函数和滑模控制函数,根据系统初始状态和目标平衡点确定指数趋近律的系数与滑动超平面的关系函数;
8、步骤5、构建三层前馈神经网络,根据所述关系函数,通过含有svc的互联双机电力系统的运行数据集进行训练;
9、步骤6、含有svc的互联双机电力系统的状态变量实时反馈给滑模控制函数和神经网络,滑模控制函数根据当前状态和切换函数计算初步的控制信号,神经网络根据输入的状态变量计算滑模控制参数的调整值和对系统不确定性的补偿值;
10、步骤7、以初步的控制信号、滑模控制参数的调整值和对系统不确定性的补偿值之和作为最终控制信号作用于svc的互联双机电力系统,引导系统状态向稳定状态收敛;同时,持续监测系统的状态,根据新的数据不断调整神经网络的权重和滑模控制的参数,使得神经网络应用于滑模变结构中逼近所述指数趋近律的系数与滑动超平面的关系函数。
11、可选地,所述根据动力学方程建立含有svc的互联双机电力系统的数学模型,具体为:
12、(1)构建发电机的转子运动方程
13、
14、其中,δi、pmi、pei、mi分别为等值发电机的电角度、等值发电机机械功率、等值发电机电磁功率和惯性时间常数;
15、(2)将式(1)展开,根据电力系统二阶模型建立数学方程,能够得到不含svc的系统数学模型为
16、
17、其中,δ1、δ2表示两等值发电机的功角;ω1、ω2表示两等值发电机的转子角速度;ω10、ω20表示两等值发电机的额定转子角速度;h1、h2表示两等值发电机的转动惯量;d1、d2表示两等值发电机的阻尼系数;pm1、pm2表示两等值发电机的机械功率;pe1、pe2表示两等值发电机的电磁功率,并且两等值发电机g1、g2的电磁功率表达式为
18、
19、其中,x∑是等值两机系统联络线的总电抗,x∑=xa+xb+xaxbbsvc,其中bsvc是svc的电纳;
20、(3)当模型中含有svc时,由svc和电力系统组成的闭环系统一般是将svc等效为闭环时间常数的一阶惯性系统,svc的数学模型为
21、
22、其中,t、u和bsvc0分别是svc的惯性时间常数、控制量和电纳初始值;
23、(4)采用相对功角和相对角速度作为状态变量,令δ=δ1-δ2-δ0,ω=ω1-ω2,δ0是两等值发电机的功角差初始值,同时将式(3)代入式(2),则可以将式(2)变换为
24、
25、(5)令θ=-d1/h1=-d2/h2,定义状态变量x1=δ,x2=ω把系统(5)转化为
26、
27、又定义将部分系统参数作如下处理
28、
29、对x3求导并将式(4)代入可得
30、
31、可选地,所述将步骤1的数学模型进行简化,得到简化模型,具体为:
32、令f(x1,x2)=k1x2cos(x1+δ0)+k2sin(x1+δ0)
33、并引入干扰项w(t),且假设w(t)有上界,即|w(t)|≤ρ,得到如下简化数学模型
34、
35、可选地,所述根据简化模型的状态变量设计切换函数,具体为:
36、
37、其中,s0=cx1+x2,α0、β0均大于0,q0、p0为正奇数,c为正常数。
38、可选地,所述基于李雅普诺夫稳定性理论设计变结构滑模控制律,得出滑模控制函数,具体为:
39、定义滑模控制的lyapunov函数为:
40、
41、对lyapunov函数求一阶导数可得:
42、其中
43、
44、为了使得滑模到达条件成立,设计等效滑模控制函数为:
45、
46、其中,k3为收敛速度,c为正常数。
47、可选地,所述构建三层前馈神经网络,通过含有svc的互联双机电力系统的运行数据集进行训练,得到神经网络模型,具体为:
48、所述三层前馈神经网络,输入层有3个神经元,对应简化数学模型的x1、x2、x3,隐藏层有至少10个神经元,输出层有2个神经元分别用于输出滑模控制参数调整值和对系统不确定性的补偿值;
49、使用含有svc的互联双机电力系统的的模拟数据和部分实际运行数据进行训练,训练过程中,根据自适应学习率的反向传播算法调整神经网络的权重和偏置,直到神经网络的输出满足设定精度要求,即能够准确地估计系统的不确定性和调整滑模控制参数。
50、可选地,所述确定系统初始状态与目标平衡点,根据系统初始状态和目标平衡点确定指数趋近律的系数与滑动超平面的关系函数,具体为:
51、将所述简化数学模型
52、
53、进一步简化为
54、
55、指数趋近律的系数与滑动超平面的关系函数定义为:
56、
57、其中,s(x)为切换函数,ueq是等效控制,k是趋近律参数,是神经网络估计的不确定性;u+≠u-,s(x)=0为切换面,若系统在未到达滑模面时,可使状态轨迹有限时间内到达该切换面;系统处于滑模面时,可沿着滑模面向着平衡点滑动且渐进稳定。
58、可选地,所述三层前馈神经网络选择sigmoid为激活函数。
59、可选地,所述最终控制信号作用于svc的互联双机电力系统,对于svc通过控制晶闸管的触发角改变流过svc的电流,即改变svc的等效电纳,进而控制svc注入或吸收电力系统的无功功率值,促使达到调节系统电压并抑制电力系统的混沌振荡。
60、本发明还提出基于无功补偿装置的电力系统混沌振荡控制系统,包括:
61、模型建立模块,用于根据动力学方程建立含有svc的互联双机电力系统的数学模型;
62、模型简化模块,用于将所述数学模型进行简化,得到简化数学模型;
63、控制函数计算模块,用于根据简化模型的状态变量设计切换函数,并基于李雅普诺夫稳定性理论设计变结构滑模控制律,得出滑模控制函数;
64、关系函数计算模块,用于确定系统初始状态与目标平衡点,结合所述切换函数和滑模控制函数,根据系统初始状态和目标平衡点确定指数趋近律的系数与滑动超平面的关系函数;
65、神经网络构建模块,用于构建三层前馈神经网络,根据所述关系函数,通过含有svc的互联双机电力系统的运行数据集进行训练;
66、控制信号计算模块,用于将含有svc的互联双机电力系统的状态变量实时反馈给滑模控制函数和神经网络,滑模控制函数根据当前状态和切换函数计算初步的控制信号,神经网络根据输入的状态变量计算滑模控制参数的调整值和对系统不确定性的补偿值;
67、混沌振荡控制模块,用于以初步的控制信号、滑模控制参数的调整值和对系统不确定性的补偿值之和作为最终控制信号作用于svc的互联双机电力系统,引导系统状态向稳定状态收敛;同时,持续监测系统的状态,根据新的数据不断调整神经网络的权重和滑模控制的参数,使得神经网络应用于滑模变结构中逼近所述指数趋近律的系数与滑动超平面的关系函数。
68、本发明的上述技术方案的有益效果如下:
69、1、电力系统中的无功功率需求是复杂多变的,受到负载类型、负载变化率等多种因素影响。神经网络具有强大的非线性映射能力,可以学习和逼近无功功率与系统状态之间复杂的关系,从而为滑模控制提供更准确的参考信息,提高无功补偿的精度。
70、2、滑模控制本身具有对系统不确定性和外部干扰的鲁棒性。在无功补偿中,电网中可能存在电压波动、谐波干扰等不确定性因素。神经网络可以实时估计这些不确定性,并通过与滑模控制的结合,进一步增强整个无功补偿系统对这些干扰的抵抗能力,确保无功补偿的稳定进行。
71、3、在无功补偿的滑模控制中,滑模面的设计对于控制性能至关重要。神经网络可以根据电力系统的实时状态(如电压幅值、相角、无功功率等)来动态调整滑模面的参数,使滑模面更适应系统的当前工况。
72、4、滑模控制中的趋近律参数、切换增益等控制参数可以通过神经网络进行优化。神经网络根据无功补偿过程中的性能指标(如补偿后的功率因数、电压波动范围等),利用学习算法(如梯度下降法)调整这些控制参数,进而有效抑制滑模变结构控制的抖振现象,使混沌振荡控制更为理想,提高了无功补偿的效率和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!