轨电位约束协同控制方法、装置、电子设备及存储介质
本发明涉及柔性直流牵引供电,特别涉及一种轨电位约束协同控制方法、装置、电子设备及存储介质。
背景技术:
1、在城市轨道交通中,柔性直流牵引供电系统被广泛使用,而有效管理轨电位是确保柔性直流牵引供电系统稳定运行的关键因素之一。轨电位是指轨道与大地之间的电位差,如果不加以控制,过高的轨电位会导致大量的杂散电流流入大地,进而引起轨道和周围金属结构的腐蚀问题,因此,合理控制轨电位对于城市轨道交通系统至关重要。
2、目前,针对轨电位的管理主要为采用ovpd(overvoltage protection device,过电压保护装置)装置、轨电位抑制控制和多目标优化三种方法。
3、然而,采用ovpd装置虽然可以约束轨电位,但会导致大量杂散电流注入大地,带来严重的腐蚀问题;采用轨电位抑制控制方法虽然可以有效约束轨电位,但系统的潮流分布不是最优的,导致能耗和其他性能指标不具有最优化的效果;采用多目标优化方法虽然可以通过最优化方法约束轨电位并最小化能耗,但计算耗时长,难以实现实时控制指令的快速更新,亟需解决。
技术实现思路
1、本发明提供一种轨电位约束协同控制方法、装置、电子设备及存储介质,以解决现有技术中轨电位管理方法存在严重腐蚀问题、系统能耗高以及计算耗时长等问题,提升了柔直牵引供电系统运行优化算法的求解效率。
2、本发明第一方面实施例提供一种轨电位约束协同控制方法,包括以下步骤:
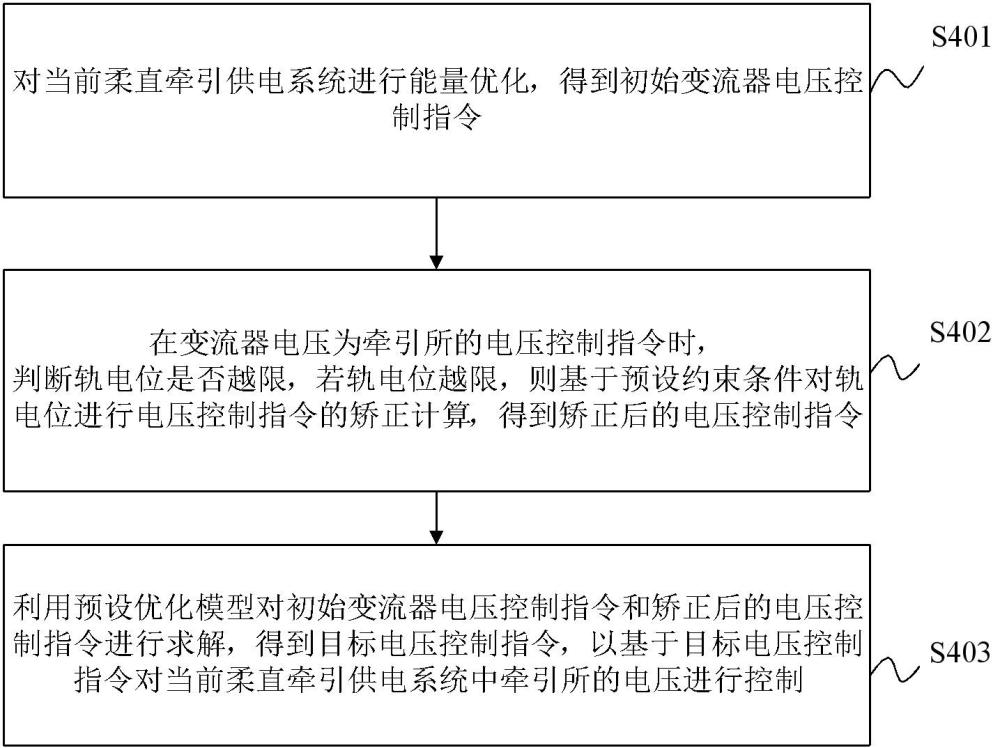
3、对当前柔直牵引供电系统进行能量优化,得到初始变流器电压控制指令;
4、在变流器电压为牵引所的电压控制指令时,判断轨电位是否越限,若所述轨电位越限,则基于预设约束条件对所述轨电位进行电压控制指令的矫正计算,得到矫正后的电压控制指令;
5、利用预设优化模型对所述初始变流器电压控制指令和所述矫正后的电压控制指令进行求解,得到目标电压控制指令,以基于所述目标电压控制指令对所述当前柔直牵引供电系统中牵引所的电压进行控制。
6、根据本发明的一个实施例,所述预设约束条件为:
7、;
8、;
9、其中,为电压控制指令矫正计算之后的协同控制子系统中的牵引所 i轨电位与电压控制指令矫正计算之前的协同控制子系统中的牵引所 i轨电位的差,为控制后期望实现的协同控制子系统中牵引所的轨电位,为协同控制子系统中的牵引所 i轨电位,为控制后期望实现的牵引所的轨电位,为牵引所的轨电位,为牵引所个数,为第个牵引所的电压控制指令,为第(+1)个牵引所的电压控制指令,为牵引所 i的电压,为牵引所 i+1的电压,为线路长度,为牵引所和牵引所之间的距离,为需要考虑轨电位约束的牵引所节点集合,为常数,为接触网的单位长度电阻,为钢轨的单位长度电阻。
10、根据本发明的一个实施例,所述利用预设优化模型对所述初始变流器电压控制指令和所述矫正后的电压控制指令进行求解,包括:
11、若所述预设优化模型为第一优化模型,则基于第一目标函数和所述预设约束条件对所述初始变流器电压控制指令和所述矫正后的电压控制指令进行求解;
12、其中,所述第一目标函数为:
13、min || us_rail*- us_energy*||2;
14、其中, us_rail*为矫正后的电压控制指令, us_energy*为初始变流器电压控制指令。
15、根据本发明的一个实施例,所述利用预设优化模型对所述初始变流器电压控制指令和所述矫正后的电压控制指令进行求解,还包括:
16、若所述预设优化模型为第二优化模型,则基于第二目标函数和所述预设约束条件对所述初始变流器电压控制指令和所述矫正后的电压控制指令进行求解;
17、其中,所述第二目标函数为:
18、min || is_cc_rail- is_cc_energy||2;
19、其中, is_cc_rail为约束轨电位的电压控制指令矫正计算后的协同控制子系统中的牵引所电流, is_cc_energy为约束轨电位的电压控制指令矫正计算前的协同控制子系统中的牵引所电流。
20、根据本发明的一个实施例,所述利用预设优化模型对所述初始变流器电压控制指令和所述矫正后的电压控制指令进行求解,还包括:
21、若所述预设优化模型为第三优化模型,则基于第三目标函数、所述预设约束条件和预设保优约束条件对所述初始变流器电压控制指令和所述矫正后的电压控制指令进行求解;
22、其中,所述第三目标函数为:
23、;
24、 ri= rci +rri;
25、其中,为电压控制指令矫正计算做的电压指令修改引起的额外损耗,为牵引所个数,为第个牵引所的电压控制指令,为第(+1)个牵引所的电压控制指令,为牵引所 i和牵引所 i+1之间的钢轨和接触网电阻之和, rci为牵引所 i和牵引所 i+1之间的接触网电阻, rri为牵引所 i和牵引所 i+1之间的钢轨电阻,为牵引所 i的电压,为牵引所 i+1的电压。
26、根据本发明实施例的轨电位约束协同控制方法,对当前柔直牵引供电系统进行能量优化,得到初始变流器电压控制指令;在变流器电压为牵引所的电压控制指令时,若轨电位越限,则基于预设约束条件对轨电位进行电压控制指令的矫正计算,得到矫正后的电压控制指令;利用预设优化模型进行求解,得到目标电压控制指令,并对当前柔直牵引供电系统中牵引所的电压进行控制。由此,解决了现有技术中轨电位管理方法存在严重腐蚀问题、系统能耗高以及计算耗时长等问题,提升了柔直牵引供电系统运行优化算法的求解效率。
27、本发明第二方面实施例提供一种轨电位约束协同控制装置,包括:
28、能量优化模块,用于对当前柔直牵引供电系统进行能量优化,得到初始变流器电压控制指令;
29、矫正计算模块,用于在变流器电压为牵引所的电压控制指令时,判断轨电位是否越限,若所述轨电位越限,则基于预设约束条件对所述轨电位进行电压控制指令的矫正计算,得到矫正后的电压控制指令;
30、求解模块,用于利用预设优化模型对所述初始变流器电压控制指令和所述矫正后的电压控制指令进行求解,得到目标电压控制指令,以基于所述目标电压控制指令对所述当前柔直牵引供电系统中牵引所的电压进行控制。
31、根据本发明的一个实施例,所述预设约束条件为:
32、;
33、;
34、其中,为电压控制指令矫正计算之后的协同控制子系统中的牵引所 i轨电位与电压控制指令矫正计算之前的协同控制子系统中的牵引所 i轨电位的差,为控制后期望实现的协同控制子系统中牵引所的轨电位,为协同控制子系统中的牵引所 i轨电位,为控制后期望实现的牵引所的轨电位,为牵引所的轨电位,为牵引所个数,为第个牵引所的电压控制指令,为第(+1)个牵引所的电压控制指令,为牵引所 i的电压,为牵引所 i+1的电压,为线路长度,为牵引所和牵引所之间的距离,为需要考虑轨电位约束的牵引所节点集合,为常数,为接触网的单位长度电阻,为钢轨的单位长度电阻。
35、根据本发明的一个实施例,所述求解模块,用于:
36、若所述预设优化模型为第一优化模型,则基于第一目标函数和所述预设约束条件对所述初始变流器电压控制指令和所述矫正后的电压控制指令进行求解;
37、其中,所述第一目标函数为:
38、min || us_rail*- us_energy*||2;
39、其中, us_rail*为矫正后的电压控制指令, us_energy*为初始变流器电压控制指令。
40、根据本发明的一个实施例,所述求解模块,还用于:
41、若所述预设优化模型为第二优化模型,则基于第二目标函数和所述预设约束条件对所述初始变流器电压控制指令和所述矫正后的电压控制指令进行求解;
42、其中,所述第二目标函数为:
43、min || is_cc_rail- is_cc_energy||2;
44、其中, is_cc_rail为约束轨电位的电压控制指令矫正计算后的协同控制子系统中的牵引所电流, is_cc_energy为约束轨电位的电压控制指令矫正计算前的协同控制子系统中的牵引所电流。
45、根据本发明的一个实施例,所述求解模块,还用于:
46、若所述预设优化模型为第三优化模型,则基于第三目标函数、所述预设约束条件和预设保优约束条件对所述初始变流器电压控制指令和所述矫正后的电压控制指令进行求解;
47、其中,所述第三目标函数为:
48、;
49、 ri= rci +rri;
50、其中,为电压控制指令矫正计算做的电压指令修改引起的额外损耗,为牵引所个数,为第个牵引所的电压控制指令,为第(+1)个牵引所的电压控制指令,为牵引所 i和牵引所 i+1之间的钢轨和接触网电阻之和, rci为牵引所 i和牵引所 i+1之间的接触网电阻, rri为牵引所 i和牵引所 i+1之间的钢轨电阻,为牵引所 i的电压,为牵引所 i+1的电压。
51、根据本发明实施例的轨电位约束协同控制装置,对当前柔直牵引供电系统进行能量优化,得到初始变流器电压控制指令;在变流器电压为牵引所的电压控制指令时,若轨电位越限,则基于预设约束条件对轨电位进行电压控制指令的矫正计算,得到矫正后的电压控制指令;利用预设优化模型进行求解,得到目标电压控制指令,并对当前柔直牵引供电系统中牵引所的电压进行控制。由此,解决了现有技术中轨电位管理方法存在严重腐蚀问题、系统能耗高以及计算耗时长等问题,提升了柔直牵引供电系统运行优化算法的求解效率。
52、本发明第三方面实施例提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的轨电位约束协同控制方法。
53、本发明第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的轨电位约束协同控制方法。
54、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!