一种链轨碾压式线缆除冰装置及控制系统的制作方法
本发明涉及线缆除冰,特别涉及一种链轨碾压式线缆除冰装置及控制系统。
背景技术:
1、目前架空的各种输电导线、地线及通讯线缆在有冰冻雨雪的恶劣天气中表面容易结冰,如不及时清除会使线杆及塔不勘重负而倒毁,造成停电及停讯,也会造成巨大的经济损失。传统的除冰方式是由人通过架子攀爬到架空线缆上敲打除冰,工效甚微,尤其在陡峭的山区架空线缆呈大斜度走向时,人工作业具有较大的安全隐患。
2、为了对高压架空线缆进行除冰,部分厂商设计出一些除冰器,这类除冰器可见于如中国专利申请号为cn202410158335.x公开的一种高压架空线路除冰机器人,其采用卷扬机构实现机器人在线缆上的上下挂动作,然而,通过这样的方式不仅操作繁复,而且卷扬机构在上挂覆冰线缆时容易出现滑脱的问题。
3、此外,市面上的大部分除冰机器人,通常是采用除冰刀进行除冰,这类结构可参考如中国专利公开号为cn107370106a公开的一种线缆除冰器,其包括清冰机构、动力机构、进给机构,其清冰机构包括清冰轮、清冰传动机构,其中清冰轮为小于360度的环形,清冰轮的环形缺口可容纳线缆通过,清冰轮上设置有清冰刀,清冰传动机构包括动力轮a。这种结构存在以下问题:1.通过清冰轮的环形缺口装入线缆,无人机挂线难度大;2.采用清冰刀对覆冰层进行清理,清除效果差,清冰效率低;3.行走轮采用常规的动力轮,在冰面行走时容易打滑;4.没有锁紧结构,机器故障时容易发生坠落问题。
4、因此,现有技术还有待于改进和发展。
技术实现思路
1、鉴于上述现有技术的不足之处,本发明的目的在于提供一种链轨碾压式线缆除冰装置及控制系统,以解决上述问题。
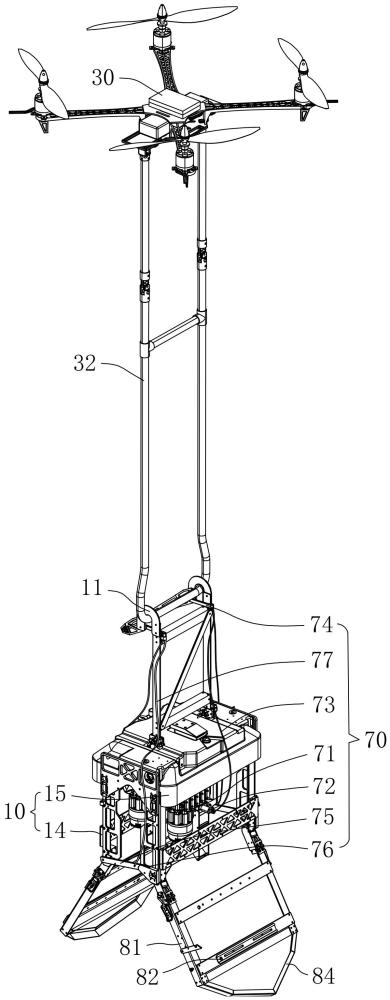
2、一种链轨碾压式线缆除冰装置,包括机架、行走机构,所述机架上端设有用于供无人机通过吊杆吊挂的挂拆吊钩,所述机架下端设有用于供线缆进入或退出的进出线槽,还包括:
3、链轨碾压机构,包括设于所述机架并且位于所述线缆沿径向两侧的链带、可拆卸固定于所述链带外侧的破冰齿、用于驱使所述链带自转的链带驱动电机,两个所述链带之间形成供线缆通过并且位于所述进出线槽上方的除冰通道;
4、夹紧机构,包括可沿所述线缆径向调整间距的两个调节座、用于驱动两个所述调节座同步对向或同步反向移动的夹紧驱动装置,两个所述调节座分别带动两个所述链带呈八字形夹紧;
5、偏心振动机构,包括偏心振动电机与偏心轴,所述偏心振动电机的输出端与所述偏心轴传动连接,所述偏心轴用于驱使所述链带另一端朝着所述线缆方向往复振动;
6、双重自锁机构,包括第一机械锁结构和第二机械锁结构;
7、所述第一机械锁结构用于封锁所述进出线槽中部并且与所述无人机吊挂联动;
8、所述第二机械锁结构用于封锁所述进出线槽延伸方向两侧并且与所述无人机吊挂联动。
9、具体的,所述第一机械锁结构包括固定于所述机架下端的插销座、设于所述插销座并且可伸入或退出所述进出线槽中部的弹簧插销、连接于所述弹簧插销一端并且用于拉动所述弹簧插销退出所述进出线槽的第一拉绳、转动设于所述挂拆吊钩的转动杆、设于所述挂拆吊钩并且用于拉动所述转动杆向下复位的第一弹性体,所述第一拉绳另一端与所述转动杆连接;
10、所述第二机械锁结构包括转动设于所述机架行走方向两侧并且用于锁住所述进出线槽的锁杆、设于所述机架并且与所述锁杆插接配合的锁槽、连接于所述锁杆与所述机架之间的第二弹性体、连接于所述锁杆一端并且用于拉动所述锁杆退出所述锁槽的第二拉绳,所述第二拉绳另一端与所述转动杆连接。
11、具体的,所述行走机构包括第一转轴、第二转轴、前行走轮和后行走轮,所述第一转轴与所述第二转轴均转动设于所述机架,所述前行走轮设于所述第一转轴上,所述后行走轮设于所述第二转轴上;
12、所述链轨碾压式线缆除冰装置还包括:
13、防滑机构,包括呈弧形结构并且沿周向分布在所述前行走轮表面的片状凸齿和呈v形结构并且沿周向分布在所述后行走轮表面的若干防滑齿,所述片状凸齿咬合爬行于所述线缆的覆冰层,所述片状凸齿表面覆盖有防滑橡胶;所述防滑齿咬合爬行于所述线缆,所述防滑齿具有与所述线缆相切的槽面;
14、联动机构,包括斜齿轮传动组件、第一皮带传动组件和第二皮带传动组件,所述第一转轴与所述偏心轴通过所述斜齿轮传动组件与第一皮带传动组件的配合传动连接,所述第一转轴与所述第二转轴通过所述第二皮带传动组件传动连接。
15、具体的,所述链轨碾压式线缆除冰装置还包括平衡机构,包括可折叠连接于所述机架下端两侧的折叠电池架、固定于所述折叠电池架的安装架、可拆卸安装于所述安装架的电池;
16、所述折叠电池架下端具有倒三角形支撑结构,所述倒三角形支撑结构通过弹簧片可转动连接于所述折叠电池架下端。
17、具体的,所述机架包括位于所述链轨碾压机构两侧的镂空板、固定于两个所述镂空板上端的防护罩,所述机架顶部设有电控盒。
18、具体的,所述链轨碾压式线缆除冰装置还包括视觉检测模块和加热除雾模块,所述视觉检测模块包括设于所述机架上的第一摄像头、第二摄像头、第三摄像头、双光融合相机、光源,所述第一摄像头朝向所述前行走轮设置,所述第二摄像头朝向所述后行走轮设置,所述第三摄像头朝向所述挂拆吊钩设置,所述双光融合相机具有可见光与红外光双通道,所述双光融合相机与所述光源均朝向所述除冰通道内的线缆设置;
19、所述加热除雾模块包括加热装置、送风装置和送风管,所述送风装置将所述加热装置产生的热气通过所述送风管吹向所述第一摄像头、第二摄像头与第三摄像头。
20、具体的,所述链带驱动电机连接有驱动轴,所述驱动轴与链带的链轮同轴连接,所述偏心轴上连接有第三转轴,所述链轨碾压机构还包括转轴安装座,所述驱动轴上端穿过所述转轴安装座,所述转轴安装座一端绕所述第三转轴转动;
21、所述夹紧驱动装置为正反螺杆驱动装置,两个所述调节座分别带动两个所述转轴安装座摆动。
22、具体的,所述斜齿轮传动组件包括连接于所述第三转轴上端的第一斜齿、与所述第一斜齿相啮合的第二斜齿、与所述第二斜齿同轴传动的第四转轴,所述第一皮带传动组件包括与所述第四转轴同轴传动的第二带轮、与所述第一转轴同轴传动的第三带轮、与所述第二带轮、第三带轮带连接的第一传动带,所述第四转轴通过轴座转动设于所述机架上;
23、所述第二皮带传动组件包括连接于所述第一转轴的第四带轮、连接于所述第二转轴的第五带轮、与所述第四带轮、第五带轮带连接的第二传动带。
24、具体的,所述链轨碾压式线缆除冰装置还包括导向机构,所述导向机构包括固定于所述机架行走方向两端的侧板、固定在所述机架内侧两端的导向架,所述侧板朝向所述进出线槽一端设有倾斜的第一引导面,所述导向架朝向所述进出线槽一端设有倾斜的第二引导面。
25、一种控制系统,用于控制所述一种链轨碾压式线缆除冰装置进行除冰工作,包括:主体运动控制模块、无线通信模块、远程控制模块;
26、所述主体运动控制模块与所述远程控制模块之间通过所述无线通信模块通信连接;
27、所述主体运动控制模块包括主控板以及与所述主控板分别电连接的电源模块和执行机构,所述电源模块用于给所述主控板供电,所述执行机构用于接收主控板发出的指令并根据所述指令执行相应动作,以进行除冰工作;所述执行机构包括所述链带驱动电机、所述夹紧驱动装置与所述偏心振动电机;
28、所述无线通信模块包括无线网桥及can总线,所述无线网桥用于所述主控板与所述远程控制模块的通信传输,所述无线网桥的通信传输包括图像传输和数据传输,所述can总线用于所述主控板与所述执行机构的通信。
29、具体的,还包括与所述主控板分别电连接的传感器模块、测量模块和监控模块;
30、所述传感器模块包括用于检测所述行走机构是否挂线到位的光电传感器、用于检测所述双重自锁机构是否解锁完全的限位传感器、用于测量夹紧机构开合量程的编码器以及用于检测链轨碾压式线缆除冰装置位置的位置传感器;所述传感器模块将检测信息反馈给所述主控板,再通过无线通信模块传输给远程控制模块查看检测信息;
31、所述测量模块包括陀螺仪传感器和加速度传感器,所述陀螺仪传感器用于检测所述链轨碾压式线缆除冰装置的姿态,所述加速度传感器用于监控所述链轨碾压式线缆除冰装置的运动速度,当所述链轨碾压式线缆除冰装置在某一方向的倾角大于设定的值时,所述链轨碾压式线缆除冰装置则停止运动,防止所述链轨碾压式线缆除冰装置掉落;
32、所述监控模块用于观察所述链轨碾压式线缆除冰装置周围环境以及动作情况,并通过所述无线通信模块传输给远程控制模块查看实时监控画面。
33、具体的,所述远程控制模块包括地面端遥控器,所述地面端遥控器具有用于控制所述链轨碾压式线缆除冰装置的动作以及显示机器状态、信号连接信息的控制界面。
34、具体的,所述除冰工作包括以下步骤:
35、s1除冰前准备:所述光电传感器检测所述行走机构是否挂线到位,所述限位传感器检测所述双重自锁机构是否解锁完全,所述编码器测量所述夹紧机构开合量程是否符合预设值,所述位置传感器检测所述链轨碾压式线缆除冰装置的位置;所述传感器模块将检测信息反馈给所述主控板,再通过所述无线通信模块传输给所述远程控制模块查看检测信息;所述监控模块观察所述链轨碾压式线缆除冰装置周围环境以及动作情况,并通过所述无线通信模块传输给远程控制模块查看实时监控画面;
36、s2除冰:当所述主控板接收到自动除冰信号时,所述主控板控制所述夹紧驱动装置驱使两个所述链带呈八字形夹紧,直至两个所述链带夹紧到位,所述夹紧驱动装置停止驱动;所述主控板控制所述偏心振动电机启动,所述链带另一端朝着线缆方向往复振动除冰,以进行初始位置的除冰作业;所述主控板控制所述链带驱动电机启动,所述链带沿所述线缆边行走边振动碾压破冰;除冰过程中,所述陀螺仪传感器实时检测所述链轨碾压式线缆除冰装置的姿态,所述加速度传感器实时监控所述链轨碾压式线缆除冰装置的运动速度,当所述链轨碾压式线缆除冰装置在某一方向的倾角大于设定的值时,所述链轨碾压式线缆除冰装置则停止运动,防止所述链轨碾压式线缆除冰装置掉落。
37、本发明的有益效果:
38、1.本发明的一种链轨碾压式线缆除冰装置及控制系统,可用于进行除冰工作,通过主控板控制夹紧驱动装置驱使两个链带呈八字形夹紧,直至两个链带夹紧到位,夹紧驱动装置停止驱动;再控制偏心振动电机启动,链带另一端朝着线缆方向往复振动除冰,以进行初始位置的除冰作业;然后通过主控板控制链带驱动电机启动,链带沿线缆边行走边振动碾压破冰,使得线缆的表面覆冰在机械振动产生应力疲劳的情况下,通过夹碎和碾压,可实现链轨碾压式线缆除冰装置移动过程中的机械除冰,可对雨凇、混合凇等结合力较强及冰层较厚的覆冰进行有效的去除,除冰效率高;
39、2.设置了防滑机构,在前行走轮表面设置有呈弧形结构的片状凸齿,对于不同厚度的覆冰层,也能够适应性地咬合爬行,而且片状凸齿表面覆盖有防滑橡胶,防滑橡胶具有较高的摩擦系数,能够提高其在覆冰层表面的行走摩擦力;在后行走轮表面设置防滑齿,防滑齿具有与线缆相切的槽面,能够提高后行走轮沿线缆行走的摩擦力;
40、3.设置了链轨碾压机构和夹紧机构,需要挂线时,可利用夹紧机构的夹紧驱动装置将两个调节座的间距调大,使得覆冰线缆能够进入除冰通道中;完成挂线后,可利用夹紧驱动装置将两个调节座的间距调小,使除冰通道的竖向投影呈“八”字形结构,当链带转动时,带动破冰齿呈鳄鱼嘴状逐渐收缩破冰,使得线缆的覆冰层被碾压破碎,结构巧妙;
41、4.设置了偏心振动机构,利用偏心轴带动链带一端朝着线缆方向往复振动除冰,以进行初始位置的除冰作业;然后再启动链带驱动电机,使链带、破冰齿沿线缆边行走边振动碾压破冰,提高除冰效率;
42、5.设置了双重自锁机构,具有良好的防坠效果,而且第一机械锁结构和第二机械锁结构均为机械式锁紧结构,代替电气锁紧结构,万一发生故障的情况下,弹簧插销和锁杆也不会对线缆锁死,利用无人机的吊挂可以轻松打开械式锁紧结构,实施对线缆除冰装置的救援,无需人工爬到线缆上取下机器。
- 还没有人留言评论。精彩留言会获得点赞!