一种异步互联双区域频率协同控制方法和装置
本发明涉及电力工程,尤其涉及一种异步互联双区域频率协同控制方法和装置。
背景技术:
1、高压直流输电技术(hvdc)具有较低的建设成本、较小的传输损耗以及较小的环境影响等特点。然而,直流输电的隔离特性在一定程度上削弱了电网间的功率互援能力。在仅通过hvdc链路连接的异步电网系统中,两个电网的频率相互独立,需要通过直流功率传输来快速响应电网频率变化,以改善电网的频率稳定性。传统频率控制方法只针对直流系统送端或受端的电力系统进行频率控制,和针对送端电网的频率控制器设计及参数整定优化,但是电力系统的送端和受端双区域具有整体频率动态特性,导致控制准确度低,频率稳定性低。
2、综上,相关技术中存在的技术问题有待得到改善。
技术实现思路
1、本发明实施例提供了一种异步互联双区域频率协同控制方法和装置,有效地提高了准确度和频率稳定性。
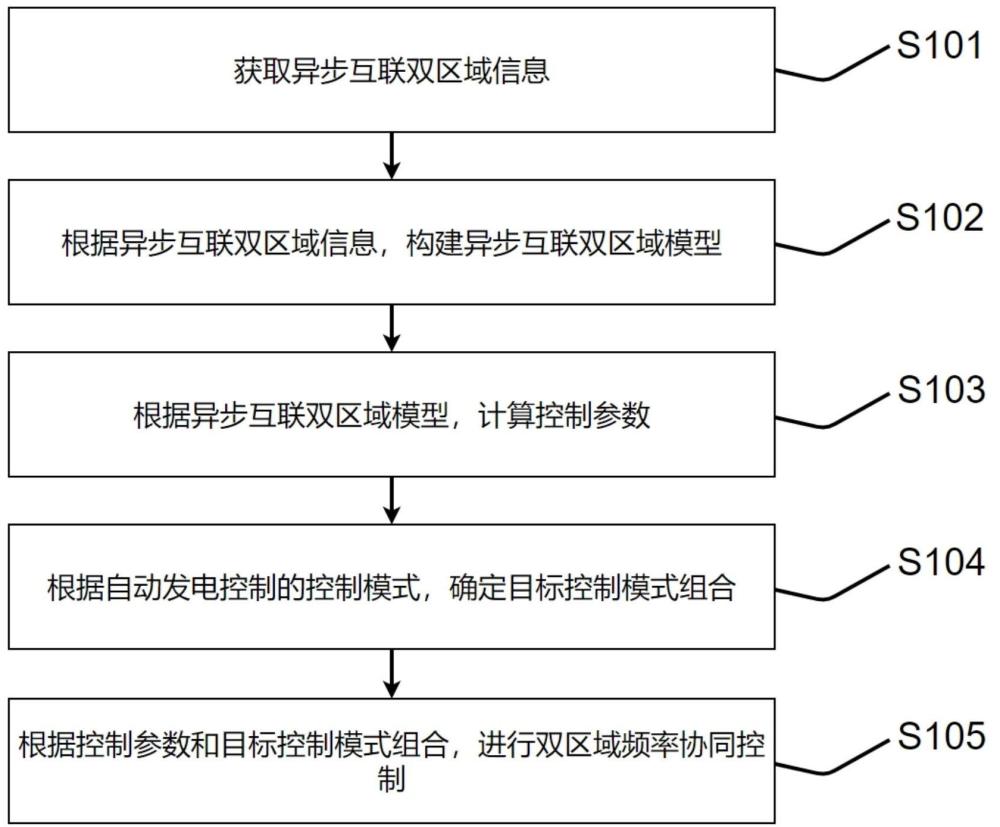
2、一方面,本发明实施例提供了一种异步互联双区域频率协同控制方法,包括以下步骤:
3、获取异步互联双区域信息;
4、根据所述异步互联双区域信息,构建异步互联双区域模型;
5、根据所述异步互联双区域模型,计算控制参数,所述控制参数包括比例系数和积分系数;
6、根据自动发电控制的控制模式,确定目标控制模式组合,所述控制模式包括定频率控制、定功率控制和联络线偏差控制;
7、根据所述控制参数和所述目标控制模式组合,进行双区域频率协同控制。
8、在一些实施例中,所述根据所述异步互联双区域信息,构建异步互联双区域模型,包括:
9、根据蒸汽容积时间常数,构建汽轮机原动机模型;
10、根据水锤效应时间常数,构建水轮机原动机模型;
11、根据所述比例系数和所述积分系数,构建直流频率控制器模型;
12、根据所述汽轮机原动机模型、所述水轮机原动机模型、所述直流频率控制器模型、所述异步互联双区域信息、水电机组调差系数和火电机组调差系数,构建所述异步互联双区域模型。
13、在一些实施例中,所述根据所述异步互联双区域模型,计算控制参数,包括:
14、对所述异步互联双区域模型进行等效变换,得到异步互联系统双区域结构框图;
15、根据所述异步互联系统双区域结构框图和功率扰动,构建闭环系统传递函数;
16、根据所述闭环系统传递函数,构建分母多项式;
17、根据所述分母多项式,构建系统特征方程;
18、根据所述系统特征方程,计算闭环极点;
19、根据劳斯判据和所述分母多项式,构建劳斯表;
20、根据所述劳斯表和所述闭环极点,构建系统稳定充要条件约束;
21、根据所述系统稳定充要条件约束,计算系统稳定性与控制参数的关系;
22、根据所述系统稳定性与控制参数的关系,确定控制参数稳定域;
23、根据阶跃稳定时间,计算综合稳定时间;
24、根据异步互联系统参数、所述控制参数稳定域和所述综合稳定时间,确定所述控制参数。
25、在一些实施例中,所述根据自动发电控制的控制模式,确定目标控制模式组合,包括:
26、根据频率偏差和区域频率偏差系数,计算所述定频率控制的区域控制偏差;
27、根据频率偏差、区域频率偏差系数和互联系统联络线功率,计算所述联络线偏差控制的区域控制偏差;
28、根据所述控制模式,确定待选控制模式组合;
29、根据所述比例系数和所述积分系数,计算异步互联双区域电网频率变化与所述待选控制模式组合的关系;
30、根据所述比例系数和所述积分系数,计算参与频率调节的直流传输功率与所述待选控制模式组合的关系;
31、根据所述定频率控制的区域控制偏差、所述联络线偏差控制的区域控制偏差、所述异步互联双区域电网频率变化与所述待选控制模式组合的关系和所述参与频率调节的直流传输功率与所述待选控制模式组合的关系,对自动发电控制进行适应性分析,得到所述目标控制模式组合。
32、在一些实施例中,所述方法还包括:
33、进行双区域频率协同控制实验;
34、所述进行双区域频率协同控制实验,包括以下步骤:
35、在所述异步互联双区域模型中,设置第一区域的电网容量、第二区域的电网容量;
36、模拟第一区域发生功率扰动、第二区域发生功率扰动和直流闭锁故障并对所述异步互联双区域模型进行仿真分析,得到频率控制实验结果。
37、在一些实施例中,所述闭环系统传递函数的表达式为:
38、,
39、式中,为以第一区域的功率扰动作为输入时的闭环系统传递函数,为两区域频率差的拉普拉斯变换,为第一区域的功率扰动的拉普拉斯变换,和均为多项式系数,,,为拉普拉斯变换中的复变量,。
40、在一些实施例中,所述根据阶跃稳定时间,计算综合稳定时间,包括:
41、根据阶跃稳定时间,通过综合稳定时间计算公式计算综合稳定时间,所述综合稳定时间计算公式为:
42、,
43、式中,为所述综合稳定时间,为第一区域发生阶跃扰动后的阶跃稳定时间,为第二区域发生阶跃扰动后的阶跃稳定时间。
44、在一些实施例中,所述根据频率偏差、区域频率偏差系数和互联系统联络线功率,计算所述联络线偏差控制的区域控制偏差,包括:
45、根据频率偏差、区域频率偏差系数和互联系统联络线功率,通过联络线偏差控制的区域控制偏差计算公式计算所述联络线偏差控制的区域控制偏差,所述联络线偏差控制的区域控制偏差计算公式为:
46、,
47、式中,为所述联络线偏差控制的区域控制偏差,为所述区域频率偏差系数,为所述频率偏差,为所述互联系统联络线功率。
48、另一方面,本发明实施例提供了一种异步互联双区域频率协同控制装置,包括:
49、第一模块,用于获取异步互联双区域信息;
50、第二模块,用于根据所述异步互联双区域信息,构建异步互联双区域模型;
51、第三模块,用于根据所述异步互联双区域模型,计算控制参数,所述控制参数包括比例系数和积分系数;
52、第四模块,用于根据自动发电控制的控制模式,确定目标控制模式组合,所述控制模式包括定频率控制、定功率控制和联络线偏差控制;
53、第五模块,用于根据所述控制参数和所述目标控制模式组合,进行双区域频率协同控制。
54、另一方面,本发明实施例提供了一种计算机装置,包括:
55、至少一个处理器;
56、至少一个存储器,用于存储至少一个程序;
57、当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现所述的方法。
58、本发明所具有的有益效果如下:
59、本发明实施例首先获取异步互联双区域信息,然后根据异步互联双区域信息,构建异步互联双区域模型,并根据异步互联双区域模型,计算控制参数,再根据自动发电控制的控制模式,确定目标控制模式组合,最后根据控制参数和目标控制模式组合,进行双区域频率协同控制,从而能够通过确定最优控制参数和控制模式来实现频率协同控制,进而提高了准确度和频率稳定性。
60、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!