用于印刷电路板的环境传感器的可调节锚固件的制作方法
用于印刷电路板的环境传感器的可调节锚固件
1.优先权要求
2.本申请要求于2018年10月1日提交的印度临时申请no.201841036987的优先权,其全部内容通过引用合并于此。
技术领域
3.本公开涉及一种印刷电路板(printed circuit board,pcb)。
背景技术:
4.环境传感器对于印刷电路板(pcb)的正常运作至关重要。例如,附接到pcb的温度传感器能够用于设置一个或多个风扇的速度,以维持pcb的操作温度。准确的周围温度感测对于控制风扇速度以用于最优性能是重要的。使风扇以最优速度运行可以降低风扇功耗、改进用户体验(例如,降低噪音)并且延长风扇预期寿命(例如,l10寿命),而不降低可靠性(例如,系统平均故障间隔时间(system mean time between failure,mtbf))。
附图说明
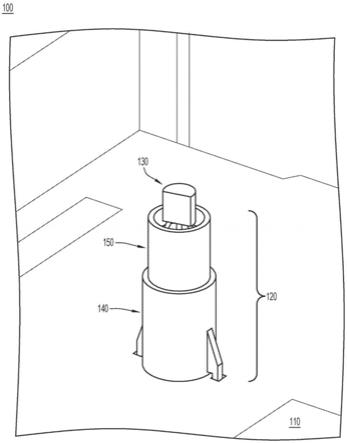
5.图1示出了根据示例性实施例的包括用于环境传感器的可调节锚固件的系统。
6.图2示出了根据示例性实施例的图1的可调节锚固件的横截面。
7.图3a
‑
图3c示出了根据示例性实施例的处于三个竖直位置的用于可调节锚固件的锁定机构。
8.图3d示出了根据示例性实施例的锁定机构的放大/特写视图。
9.图4示出了根据示例性实施例的包括具有进一步的竖直位移可构造性的可调节锚固件的系统。
10.图5a和图5b更详细地示出了根据示例性实施例的图4的可调节锚固件。
11.图6a
‑
图6c示出了根据示例性实施例的系统,其中,可调节锚固件附接到印刷电路板(pcb)中的通孔。
12.图7a和图7b示出了根据示例性实施例的系统,其中,可调节锚固件附接到pcb上的第一表面安装件类型。
13.图8a
‑
图8d示出了根据示例性实施例的系统,其中,可调节锚固件附接到pcb上的第二表面安装类型。
14.图9a和图9b示出了根据示例性实施例的图8a
‑
图8d的可调节锚固件的横截面。
15.图10a
‑
图10c示出了根据示例性实施例的被构造为使环境传感器能够实现各种自由度的各个可调节锚固件。
16.图11示出了根据示例性实施例的包括弹簧的可调节锚固件,该弹簧被构造为使可调节锚固件的管状构件稳定。
17.图12a和图12b示出了根据示例性实施例的构造有不同类型的环境传感器的各个可调节锚固件。
18.图13是根据示例性实施例的用于将可调节锚固件附接到pcb的方法的流程图。
具体实施方式
19.概述
20.在独立权利要求中陈述了本发明的方面,并且在从属权利要求中陈述了优选特征。一方面的特征可以单独地应用于每个方面或与其它方面相组合地应用。
21.在一个示例性实施例中,提供了一种可调节锚固件,该可调节锚固件包括具有第一直径并且被构造为附接到印刷电路板的第一管状构件。第二管状构件具有与第一直径不同的第二直径并且被构造为保持用于收集与印刷电路板的环境有关的数据的环境传感器。第二管状构件能够相对于第一管状构件竖直调节。
22.示例性实施例
23.典型的环境传感器以固定的方式附接到印刷电路板(pcb),这可能会对pcb的运作产生负面影响。例如,如果温度传感器布置为离pcb太近,则由于pcb的热量,该传感器的温度可能会比真实的周围温度高。如果传感器较高或较低,则根据局部空气流量,温度传感器可能会提供更准确的周围温度读数。另外,温度(或其它环境)传感器的最佳位置在pcb当中可能改变。
24.无法获得周围温度的准确读数会导致许多问题。使风扇以不必要的高速度运行会加速吸湿粉尘的积累,并且增加腐蚀故障的可能性。同时,风扇以太低的速度运行会使pcb过热。当前的固定的周围温度感测机构不准确,并且可能需要进行大量的热测试和软件开发以克服其不准确性。通常,需要添加软件校正因子来补偿不准确的热测量。然而,这不适用于所有构造/场景,从而致使在现场出现错误警报。
25.因此,本文提出了一种可调节锚固件,以实现准确的环境感测。可调节锚固件可以消除繁琐的热(和/或其它因子)测试和软件开发模块,而不会显著增加生产成本。
26.参考图1,示出了被构造为提供准确的环境测试的示例性系统100。系统100包括pcb 110、可调节锚固件120和环境传感器130(例如温度传感器)。可调节锚固件120包括管状构件140和150。管状构件140被构造为附接到pcb 110。管状构件150在管状构件140上方竖直移位,并且被构造为保持环境传感器130。环境传感器130可以被构造为收集与pcb 110的环境有关的数据(例如,pcb 110的环境的周围温度数据)。
27.管状构件150具有与管状构件140的直径不同的直径。在该示例中,管状构件140的直径大于管状构件150的直径,但是将理解,在其它示例中,管状构件150的直径可以大于管状构件140的直径。管状构件150能够相对于管状构件140竖直调节。这样,环境传感器130能够相对于pcb110竖直调节。可调节锚固件120可以由任意一种(或多种)合适的材料制成,诸如金属、塑料、非导电树脂或其任意组合,其取决于用于相对调节的机械安装件和机构。
28.虽然图1和本文随后描述的其它附图示出了管状构件的横截面是圆形的,但是这并不意味着是限制性的。管状构件的横截面可以是矩形、三角形或任何其它期望的形状。如本文所使用的术语“直径”可以指管状构件的任何横截面形状(例如,圆形、矩形、三角形等)。另外,将理解,可以利用任何合适的构件、管状件或其它。
29.图2示出了可调节锚固件120的示例性横截面。如所示出的,管状构件140和150被构造为包含耦接到环境传感器130的(绝缘导体)电线210。在一个示例中,电线210是26
‑
30
号美国线规(american wire gauge,awg)电线。电线210可以经由铅焊接220耦接到环境传感器130。管状构件150可以包括底座152,以保持环境传感器130,使得在振动期间环境传感器130的自由移动最小,否则自由移动可能使铅焊接220损坏。管状构件140和150可以通过防止暴露于环境空气中而为铅焊接220提供保护,从而使铅焊接220上的腐蚀最小化。pcb组件压接端子230可以设置在电线210的远端。压接端子230被构造为将电线210连接到pcb 110,如图1所示。电线210使环境传感器130能够发送与pcb110的环境有关的数据(例如,输出信号)。
30.在一个特定示例中,管状构件140具有0.346英寸的内径240和0.413英寸的外径250,并且管状构件150具有0.334英寸的外径260。此外,从管状构件140的顶部到管状构件140的基底的距离270可以是0.590英寸,从管状构件140的顶部到管状构件140的最低部分的距离280可以是0.791英寸。从管状构件150的顶部到管状构件150的基底的距离290可以是0.511英寸。
31.图3a
‑
图3d示出了用于可调节锚固件300的示例性锁定机构。参考图3a
‑
图3c,可调节锚固件300包括管状构件310和320。管状构件310被构造为附接到pcb,并且管状构件320在管状构件310上方竖直移位并被构造为保持环境传感器330。管状构件310和320被构造为包含耦接到环境传感器330的电线340。电线340还包括pcb组件压接端子350,该pcb组件压接端子350被构造为将电线340连接到pcb。
32.管状构件320包括旋钮360,并且管状构件310包括能够实现锚固件300的不同的竖直移位的锁定位置的多个狭槽370(l)
‑
370(3)和通道375。每个狭槽370(l)
‑
370(3)相对于其它狭槽竖直定位,并且被构造为容纳旋钮360。特别地,狭槽370(3)位于狭槽370(2)竖直上方,并且狭槽370(2)位于狭槽370(1)的竖直上方。如图3a所示,狭槽370(1)容纳旋钮360,并且由于狭槽370(1)在管状构件310上最低,因此使管状构件310和320之间的竖直位移最小化。在图3b中,狭槽370(2)容纳旋钮360,并且管状构件310和320之间的竖直位移处于中间水平/量,使得管状构件320位于管状构件310上方。在图3c中,狭槽370(3)容纳旋钮360,并且管状构件310和320之间的竖直位移处于最高位置。
33.图3d示出了狭槽370(2)的放大图并且是狭槽370(1)
‑
370(3)的详细构造的示意图。在该示例中,狭槽370(2)包括被构造为固定旋钮360的凸缘380(1)和380(2)。凸缘380(1)和380(2)可以在操作期间将管状构件320锁定在中间竖直位移位置,并且还可以防止在处理、运输和/或操作冲击/振动期间损坏环境传感器330。狭槽370(1)和370(3)也可以包括与针对狭槽370(2)所示的那些相似的凸缘。将理解,狭槽370(1)
‑
370(3)的轮廓可以通过对其各自的凸缘的添加或替代来自定义。
34.尽管在图3a
‑
图3d的示例中示出了三个狭槽370(l)
‑
370(3),但是将理解,可以利用任何合适数量的狭槽。在一个特定示例中,狭槽370(1)
‑
370(3)可以各自具有0.047英寸的高度。通道375的宽度也可以是0.047英寸。狭槽370(2)可以从狭槽370(1)和370(3)中的每一者竖直移位0.177英寸的距离。此外,在替代示例中,被构造为附接到pcb的管状构件可以包括旋钮,并且被构造为保持环境传感器的管状构件可以包括多个狭槽。
35.另外,尽管在图3a
‑
图3d的示例中的锁定机构涉及旋钮360和多个狭槽370(1)
‑
370(3),但是将理解,可以使用任何合适的锁定机构来调节管状构件之间的竖直位移。在一个示例中,被构造为附接到pcb的管状构件可以包括第一螺旋形螺纹,并且被构造为保持环境
传感器的管状构件可以包括被构造为与第一螺旋形螺纹配合的第二螺旋形螺纹。因此,可以通过将一个管状构件拧入另一个中(或从另一个中拧出)来调节管状构件之间的竖直位移。
36.在另一个示例中,被构造为保持环境传感器的管状构件可以被构造为与被构造为附接到pcb的管状构件伸缩地(例如,摩擦地)配合。因此,可以通过将一个管状构件推入另一个(或从另一个中拉出)来调节管状构件之间的竖直位移。被构造为保持环境传感器的管状构件可以被构造为能够手动地(例如,经由人手)或经由马达相对于被构造为附接至pcb的管状构件竖直调节。
37.图4示出了被构造为提供准确的环境测试的示例性系统400。系统400包括pcb 410、可调节锚固件420和环境传感器430。可调节锚固件420包括管状构件440和450。管状构件440被构造为附接到pcb 410。管状构件450在管状构件440上方竖直移位,并且被构造为保持环境传感器430。可调节锚固件420还包括在管状构件440上方和管状构件450下方竖直移位的第三管状构件460。管状构件460被构造为能够相对于管状构件440和450中的至少一个竖直调节。管状构件460为可调节锚固件420提供进一步的竖直位移可构造性。
38.管状构件450包括旋钮470,并且管状构件460包括经由通道490连接的多个狭槽480(l)
‑
480(4)。每个狭槽480(l)
‑
480(4)相对于其它狭槽竖直定位,并且被构造为容纳旋钮470。特别地,狭槽480(4)位于狭槽480(3)竖直上方,狭槽480(3)位于狭槽480(2)竖直上方,并且狭槽480(2)位于狭槽480(1)竖直上方。当狭槽480(1)容纳旋钮470时,管状构件440和450之间的竖直位移最小化。当狭槽480(2)容纳旋钮470时,管状构件440和450之间的竖直位移大于当狭槽480(1)容纳旋钮470时。当狭槽480(3)容纳旋钮470时,管状构件440和450之间的竖直位移大于当狭槽480(2)容纳旋钮470时。如图4所示,当狭槽480(4)容纳旋钮470时,管状构件440和450之间的竖直位移最大化。狭槽480(1)
‑
480(4)可以包括被构造为固定旋钮470的各个凸缘(如图3d所示)。
39.尽管在图4的示例中示出了四个狭槽480(1)
‑
480(4),但是将理解,可以利用任何合适数量的狭槽。此外,在替代示例中,在其它管状构件之间竖直移位的管状构件可以包括旋钮,并且被构造为保持环境传感器的管状构件可以包括多个狭槽。另外,尽管图4的示例中的锁定机构涉及旋钮470和多个狭槽480(1)
‑
480(4),但是将理解,可以使用任何合适的锁定机构(例如,螺旋形螺纹、伸缩配合等)来调节管状构件之间的竖直位移。竖直位移可以手动地或者经由马达调节。
40.图5a和图5b更详细地示出了可调节锚固件420。管状构件440、450和460被构造为包含耦接到环境传感器430的电线510。pcb组件压接端子520设置在电线510的端部处,以便将电线510连接到pcb。如图5a所示,管状构件460完全插入(例如,滑动)到管状构件440中。在图5b中,部分地从管状构件440移除。在一个特定示例中,管状构件460的上部具有0.413英寸的外径530和0.626英寸的高度540。管状构件460的高度550可以是1.118英寸。狭槽480(1)
‑
480(4)和通道490可以具有与狭槽370(1)
‑
370(3)和通道375相同或相似的尺寸(图3a
‑
图3c)。
41.在另一个示例中,锁定机构(例如,旋钮和狭槽、螺旋形螺纹、伸缩配合等)可以设置为调节被构造为附接到pcb的管状构件与在其它管状构件之间竖直移位的管状构件之间的竖直位移。在该示例中,可以调节被构造为附接到pcb的管状构件与在其它管状构件之间
竖直移位的管状构件之间、和/或在其它管状构件之间竖直移位的管状构件与被构造为保持环境传感器的管状构件之间的竖直位移。
42.图6a
‑
图6c示出了示例性系统600,其包括pcb 610、可调节锚固件620和环境传感器630。可调节锚固件620包括管状构件640和650。管状构件640被构造为附接到pcb 610。管状构件650在管状构件640上方竖直移位。管状构件640和650被构造为保持环境传感器630。管状构件640和650被构造为包含耦接到环境传感器630的电线660。电线660还包括pcb组件压接端子670,该pcb组件压接端子670被构造为将电线660连接到pcb 610。pcb 610包括被构造为接收压接端子670的端子孔680。pcb 610还包括被构造为接收/容纳管状构件640的通孔690。特别地,管状构件640包括被构造为附接到通孔690的臂695。臂695包括向内钩697,该向内钩697卡入通孔690中并且将可调节锚固件620固定到pcb 610。
43.图6a
‑
图6c示出了在将可调节锚固件620附接到pcb 610的通孔690的过程期间的阶段的快照。图6a示出了第一阶段,在第一阶段,可调节锚固件620放置在pcb 610上方并且准备好附接到pcb 610。图6b示出了第二阶段,在第二阶段期间,压接端子670附接到端子孔680。pcb 610此时可以经受波纹焊接工艺以焊接电线660。图6c示出了第三阶段,在第三阶段期间,臂695卡入通孔690中。管状构件640的臂695附接到通孔690,从而将可调节锚固件620固定到pcb 610。
44.在替代示例中,被构造为附接到pcb的管状构件被构造为附接到pcb上的表面安装件。图7a和图7b示出了被构造为附接到pcb上的表面安装件的管状构件的第一示例。图8a
‑
图8d示出了被构造为附接到pcb上的表面安装件的管状构件的第二示例。
45.图7a和图7b示出了包括第一表面安装件类型的示例性系统700。系统700包括pcb 710、可调节锚固件720和环境传感器730。可调节锚固件720包括管状构件740和750。管状构件740被构造为附接到pcb710。管状构件750在管状构件740上方竖直移位,并且被构造为保持环境传感器730。管状构件740和750被构造为包含耦接到环境传感器730的电线760。电线760还包括pcb组件压接端子770,该pcb组件压接端子770被构造为将电线760连接到pcb 710。pcb 710包括被构造为接收压接端子770的端子孔780。pcb 710还包括被构造为接收管状构件740的凸耳790。凸耳790可以是焊接到pcb 710的金属结构,并且管状构件740包括插入凸耳790的孔792中的臂795。特别地,臂795包括向外钩797,该向外钩797钩入凸耳790的孔792中并且将可调节锚固件720固定到pcb 710。
46.图7a和图7b示出了装配阶段,在装配阶段期间,可调节锚固件720附接到凸耳790。图7a示出了第一阶段,在第一阶段期间,压接端子770附接到端子孔780。pcb 710可以在该阶段期间经受波纹焊接工艺以焊接电线760。图7b示出了第二阶段,在第二阶段期间,臂795卡入凸耳790中。因此,管状构件740被构造为附接到表面安装件(呈凸耳790的形式)并且将可调节锚固件720固定到pcb 710。系统700可以避免在pcb710中创建通孔的需要,从而改善pcb 710中的布线,以改善信号完整性性能。
47.图8a
‑
图8d示出了包括第二表面安装件类型的示例性系统800。系统800包括pcb 810、可调节锚固件820和环境传感器830。可调节锚固件820包括管状构件840和850。管状构件840被构造为附接到pcb 810。管状构件850在管状构件840上方竖直移位,并且被构造为保持环境传感器830。管状构件840和850被构造为包含耦接到环境传感器830的电线(未示出)。电线(未示出)连接到母电连接器860。公电连接器870安装到pcb 810并且被构造为接
收母电连接器860。母电连接器860可以卡入公电连接器870中,从而将可调节锚固件820固定到pcb 810。
48.图8a
‑
图8c示出了可调节锚固件820附接到公电连接器870的阶段。图8a示出了第一阶段,在第一阶段期间,可调节锚固件820准备好附接到公电连接器870。图8b示出了第二阶段,在第二阶段期间,可调节锚固件820附接到公电连接器870。图8c示出了第三阶段,在第三阶段期间,管状构件850在管状构件840上方竖直移位。因此,管状构件840被构造为附接到表面安装件(呈公电连接器870的形式)并且将可调节锚固件820固定到pcb 810。系统800可以避免在pcb 810中创建通孔,并且具有以上结合图7a和图7b所述的相关益处。
49.图8d示出了母电连接器860和公电连接器870的放大图。如所示出的,公电连接器870包括被母电连接器860接收的多个插脚872。管状构件840包括被构造为附接到公电连接器870的凸耳890的臂880。臂880包括向内钩892,该向内钩892卡入凸耳890的孔894中,并且从而将可调节锚固件820固定到pcb 810。
50.图9a和图9b示出了可调节锚固件820的示例性横截面图。如所示出的,管状构件840和850被构造为包含连接到环境传感器830的电线910。电线910可以经由铅焊接920耦接到环境传感器830。管状构件850可以包括底座930以保持环境传感器830,使得在振动期间环境传感器830的自由移动最小,否则自由移动可能会使铅焊接920损坏。电线910连接到母电连接器860,该母电连接器860又被构造为将电线910连接到pcb 810(图8)。电线910使环境传感器830能够输出与pcb 810的环境有关的信号。
51.图9a示出了管状构件850的竖直位移最小化的第一构造。在图9a的示例中,电线910相对松弛。图9b示出了管状构件850的竖直位移最大化的第二构造。在图9b的示例中,电线910相对紧绷。
52.图10a
‑
图10c示出了被构造为能够实现各种自由度的各个示例性可调节锚固件1000a
‑
1000c。参考图10a,可调节锚固件1000a包括管状构件1010a和1020a。管状构件1010a被构造为经由母电连接器1030a附接到pcb。管状构件1020a在管状构件1010a上方竖直移位,并且被构造为保持环境传感器1040a。由可调节锚固件1000a提供的自由度在竖直方向上,如箭头1050a所示。可以经由任何合适的锁定机构(例如(例如,旋钮和狭槽、螺旋形螺纹、伸缩配合等))来提供竖直位移。
53.参考图10b,可调节锚固件1000b包括管状构件1010b和1020b。管状构件1010b被构造为经由母电连接器1030b附接到pcb。管状构件1020b在管状构件1010b上方竖直移位,并且被构造为保持环境传感器1040b。由可调节锚固件1000b提供的自由度是旋转的,如箭头1050b所示。为此,可调节锚固件1000b包括管状构件1020b的可旋转部1060b。可旋转部1060b被构造为沿着方位角相对于附接有可调节锚固件1000b的印刷电路板的平面旋转。在一个示例中,可旋转部1060b被构造为旋转至少180度(例如,360度)。在一个示例中,可旋转部1060b可以是被构造为与管状构件1020b的其余部分互锁的螺纹管。基于可旋转部1060b与管状构件1020b的其余部分之间的摩擦,可旋转部1060b还可以/可以替代地准许旋转移动。任一实施例(螺纹管或摩擦件)均可以准许从+180度到
‑
180度的旋转移动,同时防止旋转运动超过+180度和
‑
180度,以避免电线拉紧。
54.参考图10c,可调节锚固件1000c包括管状构件1010c和1020c。管状构件1010c被构造为经由母电连接器1030c附接到pcb。管状构件1020c在管状构件1010c上方竖直移位,并
且被构造为保持环境传感器1040c。由可调节锚固件1000c提供的自由度是角度平移,如箭头1050c所示。为此,可调节锚固件1000c包括管状构件1020b的枢转部1060c。枢转部1060c具有臂1062c,该臂1062c安装成准许沿极角相对于附接有可调节锚固件1000c的印刷电路板的平面旋转。在一个示例中,枢转部1060c被构造为在任一方向上旋转至少45度。枢转移动可以通过枢转部1060c在管状构件1020c上的一个或多个铰接点处的摩擦移动来实现。附加地/可替代地,一个或多个小外加螺钉可以将枢转部1060c锁定在期望的定向。将理解,可以组合一个或多个自由度(例如,单个可调节锚固件可以允许竖直位移、旋转平移和/或角度平移)。
55.图11示出了具有附加稳定性的示例性可调节锚固件1100。可调节锚固件1100包括管状构件1110和1120。管状构件1110被构造为经由母电连接器1130附接到pcb。管状构件1120在管状构件1110上方竖直移位,并且被构造为保持环境传感器1140。竖直位移可以经由任何合适的锁定机构(例如(例如,旋钮和狭槽、螺旋形螺纹、伸缩配合等)提供。可调节锚固件1100包括被构造为使管状构件1120稳定的弹簧1150。更具体地,管状构件1110可以包括/收容弹簧1150,并且弹簧1150可以支撑/提升管状构件1120。弹簧1150可以有助于吸收冲击并且保持环境传感器1140的竖直位置。
56.图12a
‑
图12c示出了构造有不同类型的环境传感器的各个可调节锚固件。参考图12a,示出了示例性系统1200a,其包括pcb 1210、可调节锚固件1220和环境传感器1230a。可调节锚固件1220包括管状构件1240和1250。管状构件1240被构造为附接到pcb 1210。管状构件1250在管状构件1240上方竖直移位,并且被构造为保持环境传感器1230a。管状构件1240和1250被构造为包含耦接到环境传感器1230a的电线。电线连接到母电连接器1260。pcb 1210包括被构造为接收母电连接器1260的公电连接器1270。管状构件1240可以卡入公电连接器1270中并且将可调节锚固件1220固定到pcb 1210。在该示例中,环境传感器1230a是被构造为收集pcb 1210环境的周围湿度数据的湿度传感器。
57.参考图12b,示出了示例性系统1200b,其包括pcb 1210、可调节锚固件1220和环境传感器1230b。系统1200b可以类似于系统1200a,除了与环境传感器1230a不相同,环境传感器1230b是被构造为收集pcb1210的环境的周围压力数据的压力传感器。将理解,根据本文所述的技术,可以使用任何合适的环境传感器(例如,温度、湿度、高度、速率、颗粒物(例如,pm2.5、pm10等)气体等)。在一个示例中,可以采用混合压力
‑
温度
‑
高度传感器。此外,根据特别的环境传感器(或者如果使用多个环境传感器),可以利用n个(例如2、4、6、8、10等)连接器电路。
58.图13是用于使用示例性可调节锚固件的示例性方法1300的流程图。在1310处,将用于收集与印刷电路板的环境有关的数据的环境传感器附接到可调节锚固件。可调节锚固件包括:第一管状构件,其具有第一直径并且被构造为附接到印刷电路板;以及第二管状构件,其具有与第一直径不同的第二直径并且被构造为保持环境传感器。第二管状构件能够相对于第一管状构件竖直调节。在1320处,将可调节锚固件附接到印刷电路板。
59.本文描述的设备可以高精度地感测周围温度。感测点可以处于周围环境中,并且可以借助于控制传感器相对于pcb的位置(竖直、旋转和/或成角度)和气流相对于环境方向的定向,来由用户控制。另外,给定pcb上的占位大小可以很小。由于无需额外的附件,因此制造成本(例如,材料清单(bill of materials,bom)、组装成本等)也可以很小。安装可以
是所提供的全面解决方案的一部分。由于本文所述的设备可以提供有效的温度测量,因此可以使开发成本(例如,热测试和软件开发时间)最小化。这可以是灵活的解决方案,该灵活的解决方案被多样化以用于其它传感器应用。该设备可以提供竖直位移、角度平移和/或旋转平移,并具有良好的机械刚度。pcb组件可以涉及通孔或表面安装技艺。该设备可以进行准确的温度测量,并且相同的布置可以用于温度传感器、湿度传感器、压力传感器、高度传感器等。
60.本文提出了一种用于热(或其它)传感器的可调节pcb锚固系统。该可调节锚固件可以准确地测量周围温度,以控制系统风扇速度,以用于最佳系统性能。最佳风扇速度可以通过降低功耗、降低噪音和改善系统可靠性来管理系统操作温度。这些可调节锚固件可以基于系统要求进行构造,并且具有多个自由度,以通过调节高度、角度和/或相对于气流方向的定向来自定义其位置。可调节锚固件可以收容传感器。可调节锚固件可以使用表面安装技艺、通孔和/或电连接器附接到pcb。由于可调节锚固件与pcb良好隔离,因此pcb产生的热量对温度(或其它)传感器的影响较小。
61.以一种形式,提供了一种设备。该设备包括:第一管状构件,其具有第一直径并且被构造为附接到印刷电路板;以及第二管状构件,其具有与第一直径不同的第二直径并且被构造为保持用于收集与印刷电路板的环境有关的数据的环境传感器,其中,第二管状构件能够相对于第一管状构件竖直调节。
62.在一个示例中,第一直径大于第二直径。
63.在一个示例中,第一管状构件和第二管状构件被构造为包含耦接到环境传感器的电线。
64.在一个示例中,第一管状构件或第二管状构件中的一个包括旋钮,并且第一管状构件或第二管状构件中的另一个包括多个狭槽,每个狭槽相对于其它狭槽竖直定位并被构造为容纳旋钮。在进一步的示例中,第一管状构件可以包括多个狭槽,并且第二管状构件包括旋钮。在进一步的示例中,多个狭槽中的至少一个狭槽包括被构造为固定旋钮的凸缘。
65.在一个示例中,第一管状构件包括第一螺旋形螺纹,并且第二管状构件包括被构造为与第一螺旋形螺纹配合的第二螺旋形螺纹。在另一个示例中,第二管状构件被构造为与第一管状构件伸缩配合。
66.在一个示例中,第二管状构件能够经由马达相对于第一管状构件竖直调节。
67.在一个示例中,该设备还包括能够相对于第一管状构件和第二管状构件中的至少一个竖直调节的第三管状构件。
68.在一个示例中,第一管状构件被构造为附接到印刷电路板中的通孔。在另一个示例中,第一管状构件被构造为附接到印刷电路板上的表面安装件。
69.在一个示例中,被构造为保持环境传感器的第二管状构件的至少一部分被构造为沿着方位角相对于印刷电路板的平面旋转。在另一个示例中,被构造为保持环境传感器的第二管状构件的至少一部分被构造为沿着极角相对于印刷电路板的平面旋转。
70.在一个示例中,该设备还包括被构造为使第二管状构件稳定的弹簧。
71.在一个示例中,环境传感器是温度传感器,并且数据是印刷电路板的环境的周围温度数据。
72.以另一种形式,提供了一种方法。该方法包括:将用于收集与印刷电路板的环境有
关的数据的环境传感器附接到可调节锚固件,该可调节锚固件包括第一管状构件和第二管状构件,该第一管状构件具有第一直径并且被构造为附接到印刷电路板,该第二管状构件具有与第一直径不同的第二直径并且被构造为保持环境传感器,其中,第二管状构件能够相对于第一管状构件竖直调节;以及将可调节锚固件附接到印刷电路板。
73.以另一种形式,提供了一种系统。该系统包括:印刷电路板;环境传感器,其用于收集与印刷电路板的环境有关的数据;可调节锚固件,其包括:第一管状构件,其具有第一直径并且被构造为附接到印刷电路板;以及第二管状构件,其具有与第一直径不同的第二直径并且被构造为保持环境传感器,其中,第二管状构件能够相对于第一管状构件竖直调节。
74.以上描述仅旨在作为示例。尽管在本文中示出并且描述了技术(如一个或多个特定示例中所呈现的),不过由于可以在权利要求的等同物的范畴和范围内进行各种修改和结构变化,因此其并不旨在限于所示出的细节。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1