一种脚踏远控自动识别系统及识别方法与流程
[0001]
本发明涉及数据识别控制系统技术领域,特别涉及一种脚踏远控自动识别系统及识别方法。
背景技术:
[0002]
通常情况下,电焊机系统的焊接需要调节电流大小,包括本机控制和脚踏远控控制。为使本机控制与脚踏远控在电焊机系统中能正常工作,通常现有的方法是在电焊机系统中提供拨动开关,以供用户手动地选择电焊机所接的是本机控制还是脚踏远控控制。这种方法需要确保用户能根据所使用的焊枪类型,及时准确地切换开关状态,从而避免糟糕的焊接性能和机器受损。例如,如果电焊机系统所接的是本机控制,但是拨动开关被设置到脚踏远控控制则主控制系统处于脱机状态,焊接电流不能有效的控制。如果电焊机系统所接的是脚踏远控控制,但是拨动开关被设置到本机控制,则辅助控制系统处于脱机状态,焊接电流不能有效的控制,因此,现有的手动切换方法容易导致焊接出现问题,影响焊接质量。
技术实现要素:
[0003]
本发明的目的在于提供一种脚踏远控自动识别系统及识别方法,用以解决上述技术问题,能够避免手动切换冗余操作,提高了电焊质量和水平。
[0004]
本发明所解决的技术问题可以采用以下技术方案来实现:一种脚踏远控自动识别系统,包括主机,所述主机可通过本机控制模块或脚踏远程控制模块完成控制,当脚踏远程控制模块连接所述主机时,脚踏远程控制模块代替所述本机控制模块实现对主机的控制;所述脚踏远程控制模块由连接端、自动识别模块和远控给定控制模块构成,所述连接端用以与主机连接,所述连接端分别连接所述自动识别模块和远控给定控制模块,所述自动识别模块用以识别所述脚踏远程控制模块是否与主机连接,当自动识别模块识别为连接后,所述远控给定控制模块实现对主机的控制。
[0005]
当连接端完成与主机连接,自动识别模块获得电压信号,所述自动识别模块包括运算放大比较器,所述运算放大比较器正向端用以获得电压信号,并用以与运算放大比较器反向端的电压基准值比较,所述运算放大比较器正向端电压高于反向端电压,所述运算放大比较器输出高电平,完成对开关模块的导通,所述开关模块连接所述本机控制模块,所述本机控制模块的给定信号转为低电平,所述远控给定控制模块完成对主机的控制。
[0006]
当连接端与主机断开时,自动识别模块无电压信号,所述自动识别模块包括运算放大比较器,所述运算放大比较器正向端无电压信号,所述运算放大比较器正向端与反向端的电压基准值比较,所述运算放大比较器正向端电压低于反向端电压,所述运算放大比较器输出低电平,完成对开关模块的截止,所述本机控制模块直接完成主机控制。
[0007]
所述开关模块为npn型三级管,所述运算放大比较器用以连接npn型三级管的基极,npn型三级管的集电极用以连接所述本机控制模块,npn型三级管的发射极内部接地。
[0008]
所述连接端由第一引脚端、第二引脚端和第三引脚端构成,所述第二引脚端与所述远控给定控制模块连接;所述第三引脚端与所述自动识别模块连接。
[0009]
所述第二引脚端内连接脚踏远程控制模块内的第一可变电阻模块,所述远控给定控制模块通过所述第一可变电阻模块实现调节。
[0010]
所述本机控制模块与所述主机的控制输入端之间设有第二可变电阻模块,所述本机控制模块通过所述第二可变电阻模块实现调节。
[0011]
一种基于脚踏远控自动识别系统的识别方法,步骤1,连接端与主机完成连接,连接端第三引脚端获得一个电压信号经过电阻至运算放大比较器的正向端;步骤2、运算放大比较器正向端接收的电压信号完成与反向端预设的电压基准值完成比较,判定运算放大比较器正向端接收的电压信号是否高于反向端预设的电压基准值;步骤3、主机完成本机控制模块或脚踏远程控制模块给定控制信号的输入。
[0012]
在步骤3中,当运算放大比较器正向端接收的电压信号高于反向端预设的电压基准值时,运算放大比较器输出端完成高电平输出,经过限流电阻至npn型三级管基极,npn型三级管完成接地导通,本机控制模块通过完成导通的npn型三级管实现接地,从而将本机控制模块输出的给定控制信号拉至低电平,远控给定控制模块完成对本机的给定控制信号的输入,实现脚踏远程控制模块对主机的控制。
[0013]
在步骤3中,当运算放大比较器正向端接收的电压信号低于反向端预设的电压基准值时,运算放大比较器输出端完成低电平输出,经过限流电阻至npn型三级管基极,npn型三级管的接地截止,本机控制模块输出的给定控制信号直接实现对主机的控制。
[0014]
本发明与现有技术相比具有如下突出优点和效果:本发明通过优化设计,改进传统电焊机控制系统的切换模式,采用自动识别完成判断,能够避免手动切换冗余操作,提高了电焊质量和水平;同时该设计控制系统简单有效,成本相对较低。
[0015]
本发明的特点可参阅本案图式及以下较好实施方式的详细说明而获得清楚地了解。
附图说明
[0016]
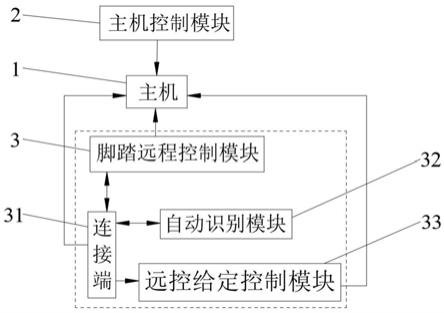
图1为本发明控制结构示意图;图2为本发明电路结构示意图;其中,1、主机;2、本机控制模块;3、脚踏远程控制模块;31、连接端;32、自动识别模块;33、远控给定控制模块。
具体实施方式
[0017]
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本发明。
[0018]
实施例1结合附图,本发明公开了一种脚踏远控自动识别系统,包括主机1,主机1可通过本机控制模块2或脚踏远程控制模块3完成控制,当脚踏远程控制模块3连接主机1时,脚踏远程控制模块3代替本机控制模块2实现对主机1的控制;脚踏远程控制模块3由连接端31、自动识别模块32和远控给定控制模块33构成,连接端31用以与主机1连接,所述连接端31分别连接
自动识别模块32和远控给定控制模块33,自动识别模块32用以识别脚踏远程控制模块3是否与主机1连接,当自动识别模块32识别为连接后,远控给定控制模块33实现对主机1的控制。
[0019]
当连接端31完成与主机1连接,自动识别模块32获得电压信号,自动识别模块32包括运算放大比较器,运算放大比较器正向端用以获得电压信号,并用以与运算放大比较器反向端的电压基准值比较,运算放大比较器正向端电压高于反向端电压,运算放大比较器输出高电平,完成对开关模块的导通,开关模块连接本机控制模块2,本机控制模块2的给定信号转为低电平,远控给定控制模块33完成对主机的控制。
[0020]
当连接端31与主机1断开时,自动识别模块32无电压信号,自动识别模块32包括运算放大比较器,运算放大比较器正向端无电压信号,运算放大比较器正向端与反向端的电压基准值比较,运算放大比较器正向端电压低于反向端电压,运算放大比较器输出低电平,完成对开关模块的截止,本机控制模块2直接完成主机1控制。
[0021]
其中,主机1为电焊机控制系统,根据脚踏远程控制模块3与电焊机控制系统连接与否,利用采样电路输出不同的电压幅值的电压信号,集合运算放大器完成比较,通过将采样电压与预设电压基准值进行比较,根据比较结果获知脚踏远程控制模块是否已经与电焊机控制系统连接,并在判断为连接后,切换电焊机控制系统的工作模式为脚踏远控焊接模式,调整电焊机控制系统的输出给定控制方式,电焊机控制系统输出给定切换至由脚踏远程控制模块内的可变电阻调节。
[0022]
优选的,开关模块为npn型三级管,所述运算放大比较器用以连接npn型三级管的基极,npn型三级管的集电极用以连接所述本机控制模块,npn型三级管的发射极内部接地。
[0023]
优选的,连接端31由第一引脚端、第二引脚端和第三引脚端构成,连接端通常选择vh-03插座,包括三个引脚,其中,第二引脚端与远控给定控制模块33连接;第三引脚端与自动识别模块31连接;第二引脚端内连接有脚踏远程控制模块3内的第一可变电阻模块,远控给定控制模块33通过第一可变电阻模块实现调节。
[0024]
优选的,本机控制模块2与主机1的控制输入端之间设有第二可变电阻模块,本机控制模块2通过第二可变电阻模块实现调节。
[0025]
优选的,自动识别模块32包括接地电容c5、接地电阻r12、电阻r11、运算放大比较器u1a、限流电阻r10、接地电阻r14、电动r4、基准电阻r6和基准电阻r13,其中基准电阻r6和基准电阻r13分别连接运算放大比较器u1a负向端引脚,形成一个预设的电压基准值,方便实现比较。
[0026]
优选的,远控给定控制模块33包括电感l2、电阻r5、电阻r8、稳压二极管z1、开关二极管d2,还包括电容c3、c7等外围部元器件来实现控制给定的信号。
[0027]
优选的,本机控制模块2包括开关二极管d1、电阻r1、电阻r2、电阻r3、电阻r4、三级管q1、电容c1、电容c2、可变电阻p2、电阻r7、电阻r9、开关二极管d3、电容c6,用以来实现控制给定信号。
[0028]
当连接端31完成与主机1连接,连接端第三引脚端获得一个电压信号后,经过电阻r11至运算运算放大比较器u1a的正向端,完成与上述运算放大比较器u1a负向端的预设的电压基准值比较,此时正向端的电压高于反向端,所以运算放大比较器u1a的1脚输出高电平,经限流电阻r10至三极管q2基极,q2导通,本机控制模块的给定控制信号拉至低电平,因
此本机控制模块的给定信号不会影响到脚踏远程控制模块给定信号,而脚踏远程控制模块给定控制由连接端第二引脚端经电感l2、电阻r5、电阻r8、稳压二极管z1、开关二极管d2等实现控制给定的信号,从而输入至主机接收端。
[0029]
当连接端31与主机1断开时,连接端31第三引脚端没有电压信号,此时运算放大比较器u1a正向端的电压低于反向端,所以运算放大比较器u1a的1脚输出低电平,经限流电阻r10至三极管q2基极,q2截止,因此脚踏远程控制模块的给定信号不会影响到本机控制模块的给定信号,而本机控制模块的给定信号由三级管q1经可变电阻器p2、电阻 r7、开关二极管d3等完成控制给定的信号,从而输入至主机接收端。
[0030]
其中,主机1的接收端为运算放大比较器u1b,型号为lm324,配合设有外围元器件电容c8、电阻r15等。
[0031]
实施例2基于实施例1,本发明公开了一种基于脚踏远控自动识别系统的识别方法,步骤1,连接端与主机完成连接,连接端第三引脚端获得一个电压信号经过电阻至运算放大比较器的正向端;步骤2、运算放大比较器正向端接收的电压信号完成与反向端预设的电压基准值完成比较,判定运算放大比较器正向端接收的电压信号是否高于反向端预设的电压基准值;步骤3、主机完成本机控制模块或脚踏远程控制模块给定控制信号的输入。
[0032]
在步骤3中,当运算放大比较器正向端接收的电压信号高于反向端预设的电压基准值时,运算放大比较器输出端完成高电平输出,经过限流电阻至npn型三级管基极,npn型三级管完成接地导通,本机控制模块通过完成导通的npn型三级管实现接地,从而将本机控制模块输出的给定控制信号拉至低电平,远控给定控制模块完成对本机的给定控制信号的输入,实现脚踏远程控制模块对主机的控制。
[0033]
在步骤3中,当运算放大比较器正向端接收的电压信号低于反向端预设的电压基准值时,运算放大比较器输出端完成低电平输出,经过限流电阻至npn型三级管基极,npn型三级管的接地截止,本机控制模块输出的给定控制信号直接实现对主机的控制。
[0034]
本发明通过优化设计,改进传统电焊机控制系统的切换模式,采用自动识别完成判断,能够避免手动切换冗余操作,提高了电焊质量和水平。
[0035]
由技术常识可知,本发明可以通过其它的不脱离其精神实质或必要特征的实施方案来实现。因此,上述公开的实施方案,就各方面而言,都只是举例说明,并不是仅有的。所有在本发明范围内或在等同于本发明的范围内的改变均被本发明包含。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1