具有整合力传感器的层压体和相关方法与流程
具有整合力传感器的层压体和相关方法
1.相关申请的交叉引用
2.本技术根据35u.s.c.
§
119要求2019年11月22日提交的美国临时申请号62/939,246的优先权权益,所述临时申请的内容以引用的方式整体并入本文。
技术领域
3.广义地,本公开内容涉及具有直接制造在玻璃层压体上或中的整合电子器件的实施方式。更具体地,本公开内容涉及层压体的各种实施方式,所述层压体具有力传感器,所述力传感器被配置有致动间隔物和/或相邻间隔物,使得层压体在制造时和/或在安装时被配置在无应变初始位置中,使得力传感器的动态范围保持在层压体内。
背景技术:
4.玻璃表面广泛地用于触摸感测。力感测相较于触摸感测具有几个优点:(1)所述力感测不太受以下项的影响:(a)表面污染,以及(b)表面上存在附加材料(例如,油脂);以及(2)与触摸感测相比,力感测更加不会受触摸表面的影响:例如触摸感测很大程度上取决于用户是使用裸手指还是戴有手套的手指,而力感测应对这两种情况均有效。对于超过数十年的建筑用途,力感测预计比触摸感测更适合。将力传感器并入到建筑产品中具有挑战性。
技术实现要素:
5.广义地,本公开内容涉及具有并入到具有玻璃的层压体中的电子或光电功能的实施方式。更具体地,本公开内容涉及层压体的各种实施方式,所述层压体具有通过在层压体的至少一个表面上施加力(压力)来控制电子设备的操作的能力。这是通过在层压体的构造中并入力传感器并且将来自传感器的信号引导到可具有电子性质、电性质或光电性质的至少一个设备以用于控制至少一个设备来完成。此外,力传感器和附件可以不会影响层压体的至少一个表面的外观的方式并入,使得层压体可保持建筑用途、汽车用途和其他用途的美学吸引力。此外,层压体的构造被配置成使得用户易于通过用手指按压层压体表面来控制各种设备的操作。
6.一般来讲,本公开内容涉及具有嵌入/整合电子或光电设备的层压体的实施方式。这些设备包括照明设备、温度传感器、显示器、触摸传感器、触觉反馈器件、天线、力传感器。设备在其嵌入状态下保持功能和灵敏度。就力传感器而言,灵敏度由作为通过按压在层压体的外表面(薄玻璃)上而施加的力(传感器致动)的函数的电阻或电容或生成的电荷的变化来定义。本文所述的层压体配置被配置成使得传感器灵敏度在层压状态下与在非层压状态下相同。为简洁起见,发明人在整个文献中将传感器的这种状态称为“正常状态”,其中层压传感器表现得类似于非层压传感器。通过设计来最小化传感器灵敏度在施加力范围内的损失。所述设计被优化以提供积极的用户体验,所述积极的用户体验在用户在玻璃层压体上使用既不过量也不太轻的手指压力并且用户在不同玻璃层压体上各种位置处使用相同量的压力时产生。
7.在一些实施方式中,玻璃层压体被配置有嵌入/整合力传感器,所述嵌入/整合力传感器在其嵌入状态下保持灵敏度,包括电阻、电容或生成的电荷是通过按压在层压体的外表面(薄玻璃)上而施加的力(传感器致动)的函数。本文所述的层压体配置被配置成在传感器上不具有应变(例如,在安装时),并且使得(例如,经由致动)施加到层压体的任何应变因此被传递到力传感器(例如,在层压体或其相应的层没有过度或过量变形的情况下)。
8.由于以下三个原因而难以在玻璃层压体内配置力(压力)传感器:(1)力传感器可在层压过程中变得预应力,从而减小用户能够从层压体生成的信号的范围,(2)层压体表面上所需的压力可能过量以致于无法从从嵌入层压体内侧的力传感器生成信号,这又可减小用户能够从层压体生成的信号的范围,以及(3)就通过在不同层压体上或在相同层压体上不同传感器位置处施加相同力(压力)来生成不同量的信号而言部件到部件可变性。利用基于电阻效应的常规力传感器,电阻与施加力的关系是非常灵敏的函数。利用玻璃层压体,另一个问题是如果用户需要对层压体中的玻璃施加过量力以操作设备,则可导致对玻璃层压体的表面造成损坏(例如,玻璃破损)。
9.在一个方面,提供了一种玻璃层压体,其包括:顶部叠层,所述顶部叠层由玻璃层和衬料基板配置,其中所述玻璃层经由粘合剂粘合到所述衬料基板;底部叠层,所述底部叠层由主体基板和主体衬料基板(例如,钢)配置,其中所述主体衬料基板经由粘合剂粘合到所述主体基板上;其中所述顶部叠层利用定位在所述顶部叠层与所述底部叠层之间的所述粘合剂配置到所述底部叠层;以及力传感器,所述力传感器整合到以下中的至少一个中:所述顶部叠层和所述底部叠层,其中所述力传感器被配置来与设备或系统以电的方式通信;其中所述玻璃层压体被配置来利用所述玻璃层上的压力事件致动力传感器。
10.在一些实施方式中,多个间隔物被配置在所述玻璃层与所述衬料基板之间,其中所述间隔物被配置成使得所述至少一个力传感器处于零电阻模式(例如,在静态非致动配置中无残余应变)。
11.在一些实施方式中,所述间隔物因此是致动间隔物。
12.在一些实施方式中,所述间隔物因此是相邻间隔物(例如,辅助间隔物)。
13.在一些实施方式中,多个间隔物被配置在所述玻璃层与所述衬料基板之间,其中所述间隔物被配置成使得所述至少一个力传感器处于“正常状态”)。
14.在一些实施方式中,所述间隔物是传感器保持间隔物,其具有用于所述传感器的切口(腔)。
15.在一些实施方式中,所述间隔物是间隙填充间隔物,其填充所述传感器与所述层压体中的相邻层之间的间隙。
16.在一些实施方式中,所述玻璃背衬基板是薄玻璃。在一些实施方式中,所述玻璃背衬基板是薄柔性玻璃。
17.在一些实施方式中,所述玻璃背衬基板所具有的厚度不大于300微米。
18.在一些实施方式中,所述层压体的层利用粘合剂粘合在一起,所述粘合剂选自由以下项构成的组:光学清透粘合剂、压敏粘合剂和透明胶带。
19.在一些实施方式中,所述主体基板包括:mdf或hpl。
20.在一些实施方式中,所述主体衬料基板包括金属薄片(例如,钢)。
21.在一些实施方式中,所述力传感器被配置有多个间隔物构件,其中所述间隔物构
件定位在:(1)所述力传感器的上表面与所述相邻层的下表面之间;(2)所述层压体的两个相邻的、间隔开的层与所述传感器的边缘之间;以及它们的组合。
22.在一些实施方式中,所述间隔物包括至少一个相邻间隔物和至少一个致动间隔物。
23.在一些实施方式中,所述相邻间隔物被配置有传感器孔,所述传感器孔的大小被设定成足以使得所述力传感器和电线保持在其中。
24.在一些实施方式中,所述力传感器被配置有电线,其中经由所述电线,致动信号被传送到所述玻璃层压体外部的位置。
25.在一些实施方式中,所述电线被配置来将致动信号从所述层压体中的所述力传感器传送到所述层压体外部的设备或系统。
26.在一些实施方式中,所述电线被配置来将致动信号从所述层压体中的所述力传感器发送到定位成位于所述层压体外部表面上或与所述层压体相邻的位置的设备或系统。
27.在一些实施方式中,从所述力传感器引导所述电线以经由间隔物孔离开所述层压体。
28.在一些实施方式中,所述力传感器在所述衬料基板中容纳在基板传感器孔中。
29.在该实施方式中,当所述力传感器厚于所述衬料基板时,在所述玻璃层与所述背衬基板层之间利用相邻间隔物和致动间隔物的组合。
30.在该实施方式中,当所述力传感器薄于所述衬料基板时,在所述玻璃层与所述力传感器之间利用致动间隔物。
31.在一些实施方式中,所述玻璃层包括无机玻璃。
32.在一些实施方式中,所述玻璃层是碱土金属硼铝硅酸盐玻璃。
33.在一些实施方式中,所述力传感器是基于:电阻变化、电容变化或压电效应。
34.在一些实施方式中,所述力传感器是聚合物力传感器(例如,压电聚合物、聚偏二氟乙烯)。
35.在一些实施方式中,所述层压体是建筑产品。
36.在一些实施方式中,所述层压体是汽车产品。
37.在一个实施方式中,提供了一种玻璃层压体,其包括:玻璃层(例如,薄玻璃层,小于300微米);以及玻璃背衬基板(例如,金属、钢、mdf和hpl);至少一个力传感器(例如,其定位在所述薄玻璃与所述玻璃背衬基板之间);以及多个间隔物,所述多个间隔物被配置在所述薄玻璃层与所述玻璃背衬层之间,其中所述间隔物被配置成使得所述至少一个力传感器在不处于压力事件下时处于零电阻模式(例如,在组装后或静态配置中无残余应变)。
38.在一些实施方式中,所述间隔物包括至少一个相邻间隔物和至少一个致动间隔物。
39.在一些实施方式中,所述相邻间隔物被配置有导通孔,所述导通孔的大小被设定成足以使得所述力传感器和电线保持在其中。
40.在一些实施方式中,所述力传感器被配置有电线以将所述致动信号传送到所述玻璃层压体外部的位置。
41.在一些实施方式中,从所述力传感器引导所述电线以经由间隔物孔离开所述层压板。
42.在一些实施方式中,所述力传感器在所述衬料基板中容纳在基板传感器孔中。
43.在该实施方式中,当所述力传感器厚于所述衬料基板时,在所述玻璃层与所述背衬基板层之间利用相邻间隔物和致动间隔物的组合。
44.在该实施方式中,当所述力传感器薄于所述衬料基板时,在所述玻璃层与所述力传感器之间利用致动间隔物。
45.在一些实施方式中,所述间隔物因此是致动间隔物。
46.在一些实施方式中,所述间隔物因此是相邻间隔物。
47.在一些实施方式中,所述玻璃层包括无机玻璃。
48.在一些实施方式中,所述玻璃层是碱土金属硼铝硅酸盐玻璃。
49.在一些实施方式中,所述力传感器是基于:电阻变化、电容变化或压电效应。
50.在一些实施方式中,所述力传感器是聚合物力传感器(例如,压电聚合物、聚偏二氟乙烯)。
51.在一些实施方式中,所述层压体是建筑产品。
52.在一些实施方式中,所述层压体是汽车产品。
53.在另一方面,提供了一种方法,其包括:致动嵌入玻璃层压体中或上的力传感器;响应于所述致动步骤生成电信号;以及利用所述电信号控制电子设备或系统。
54.在一些实施方式中,所述控制包括接通、关断或调整所述电子设备或所述系统。
55.附加特征和优点将在随后的详细描述中进行阐述,并且对于本领域的技术人员而言根据所述描述将被容易地理解或者通过实践如本文所描述的实施方式(包括随后的详细描述、权利要求书以及附图)而被认识到。
56.应当理解,上述概述和随后的详细描述仅是示例性的,并且意图在本公开内容被要求保护时提供用于理解本公开内容的性质和特征的概观或框架。
57.附图被包括以提供对本公开内容原理的进一步理解,并且被并入本说明书并且构成本说明书的一部分。附图示出一个或多个实施方式,并且与描述一起用于以举例的方式解释本公开内容的原理和操作。应当理解,本公开内容的在本说明书和附图中公开的各种特征可以任何和所有组合使用。通过非限制性示例的方式,本公开内容的各种特征可根据以下方面彼此组合。
附图说明
58.当参考附图阅读本公开内容的以下详细描述时,更好地理解本公开内容的这些和其他特征、方面和优点,在附图中:
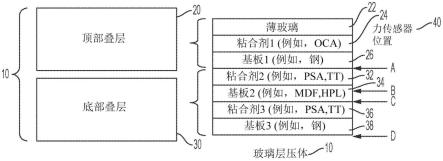
59.图1示出根据本公开内容的各种实施方式的层压体配置的实施方式。顶部叠层和底部叠层单独地示出在左侧,并且它们相应的部件(以非限制性示例的形式)设置在示出在右侧的玻璃层压体中。根据本公开内容,在玻璃层压体层的右侧,示出被标记为a、b、c和d的4个箭头,这些箭头是力传感器布置的四个非限制性示例(实施方式)。
60.图2a至图2d示出根据本公开内容的一个或多个实施方式的力传感器位置(如图1所指示)以及具体层压体配置的各种非限制性示例(实施方式)。
61.图3a示出根据本公开内容的一个或多个实施方式的具有力传感器的层压体的实施方式,所述力传感器被配置来与控制系统通信,所述控制系统致动设备或系统中的响应。
62.图3b示出根据本公开内容的一个或多个实施方式的具有力传感器的层压体的实施方式,所述力传感器被配置来与设备或系统通信(致动或调整所述设备或系统)。
63.图4a示出根据本公开内容的一个或多个实施方式的配置在层压体中的通道的实施方式,(例如,所述通道的大小被设定成足以保持电线并沿着层压体的一部分(外部边缘)引导所述电线。
64.图4b示出根据本公开内容的一个或多个实施方式的配置在层压体中的孔的实施方式,(例如,所述孔的大小被设定成足以保持电线并从层压体内侧向层压体外侧引导所述电线。
65.图4c示出根据本公开内容的一个或多个实施方式的配置在层压体的基板(例如,基板主体)中的传感器孔的实施方式,其中力传感器定位在所述传感器孔中。
66.图5a示出根据本公开内容的在示例性区段中的构建体1的示意图,其中向下箭头指示致动事件(例如,施加到顶部叠层的力或压力)。
67.图5b示出根据本公开内容的通过施加的力(g)测量的电阻(欧姆),其示出构建体1在零施加力下与在最大施加力下的电阻,意指示例的构建体1的总体减小的动态范围。
68.图6a示出根据本公开内容的在示例性区段中的构建体2的示意图,其中向下箭头指示层压体(并且因此,力传感器)上的致动事件(例如,施加到顶部叠层的力或压力)。
69.图6b示出根据本公开内容的通过施加的力(g)测量的电阻(欧姆),其示出构建体2在零施加力下与在最大施加力下的电阻,意指示例的构建体2的总体减小的动态范围。
70.图7a示出根据本公开内容的在示例性区段中的构建体3的示意图,其中向下箭头指示层压体(并且因此,力传感器)上的致动事件(例如,施加到顶部叠层的力或压力)。
71.图7b示出根据本公开内容的通过施加的力(g)测量的电阻(欧姆),其示出构建体3在零施加力下与在最大施加力下的电阻,意指示例的构建体3的总体减小的动态范围。
72.图8a示出根据本公开内容的在示例性区段中的构建体4的示意图,其中向下箭头指示层压体(并且因此,力传感器)上的致动事件(例如,施加到顶部叠层的力或压力)。
73.图8b示出根据本公开内容的通过施加的力(g)测量的电阻(欧姆),其示出构建体4在零施加力下与在最大施加力下的电阻,意指示例的构建体4的总体减小的动态范围。
74.图9a示出根据本公开内容的在示例部分中的构建体5的示意图,其中向下的箭头指示在层压体上(因此,力传感器)的致动事件(例如,施加到顶部叠层的力或压力)。
75.图9b示出根据本公开内容的通过施加的力(g)测量的电阻(欧姆),其示出构建体5在零施加力下与最大施加力下的电阻,意指示例的构建体5的总体宽动态范围。
76.图10示出根据本公开内容的使用具有板载层压体(例如,配置在层压体上或中)的层压体的实施方式的方法。
具体实施方式
77.在以下详细描述中,出于解释而非限制目的,阐述公开具体细节的示例性实施方式以提供对本公开内容的各种原理的透彻理解。然而,对受益于本公开内容的本领域普通技术人员显而易见的是,本公开内容可在脱离本文所公开的具体细节的其他实施方式中实践。此外,可省略对众所周知的设备、方法和材料的描述,以便不使本公开内容的各种原理的描述模糊。最后,在适用的情况下,相似的参考数字是指相似的元件。
78.图1在左侧和在右侧以两个视图示出玻璃层压体10配置(一般的顶部叠层20配置与底部叠层30配置)的实施方式:玻璃层压体10的顶部叠层20和底部叠层30中的每一个中的各个层(包括示例性材料)的更详细示意图。另外,关于更详细的玻璃层压体10的示意图,存在四个箭头,所述四个箭头指示在玻璃层压体10内可配置和/或定位力传感器40的位置的四个非限制性示例。4个箭头指代为a;b;c;和d。
79.参考图1,玻璃层压体的顶部叠层20包括:作为上表面的玻璃基板(例如,薄玻璃)22,之后是将薄玻璃22粘合到基板26(例如示出为基板1,玻璃衬料基板)的粘合剂层24。底部叠层30包括基板34,所述基板34经由粘合剂层36(示出为粘合剂3)粘合到另一基板38(例如,衬料基板,示出为基板3)上。
80.粘合剂32被配置在顶部叠层20与底部叠层30之间以将两者粘合在一起,经由粘合剂32(例如示出为粘合剂2)粘合到顶部叠层20。虽然粘合剂32示出为在底部叠层30中,但还需注意,粘合剂可任选地被配置在顶部叠层20中。
81.在力传感器40位置a中,一个或多个力传感器40定位在顶部叠层20(顶部叠层的最下层下方)与底部叠层30(顶部叠层的最上层上方)之间。在力传感器40位置b中,一个或多个力传感器40经由基板主体34中的一个或多个传感器孔/一个或多个层压体层孔54(或切口)定位在底部叠层30(例如,基板2)的基板主体34内。在力传感器40位置c中,一个或多个力传感器40定位在底部叠层30的层之间,具体地,在基板2 34(例如,基板主体)与基板3 38(例如基板主体衬料)之间。在力传感器40位置d中,一个或多个力传感器40定位在底部叠层30下方。
82.图2a至图2d示出力传感器位置(如图1所指示)以及具体玻璃层压体10配置的各种非限制性示例(实施方式)。
83.另外,图2a至图2d示出放置在玻璃层压体22的顶部(外)表面之上的保护膜12。图2a示出配置在顶部叠层20与底部叠层30之间、顶部叠层20的底部的力传感器40。图2b示出定位在底部叠层30的底部、背衬基板38(在此示出为钢)下方的力传感器40。图2c示出定位在基板34的主体内的力传感器40。图2d示出定位在底部叠层20中、基板主体34/基板2下方的力传感器40。
84.图3a示出具有力传感器40的玻璃层压体10的实施方式,所述力传感器40被配置来与控制系统60通信(经由电信号62),所述控制系统60经由控制信号64致动装置或系统58中的响应。来自控制系统60的信号64可生成对设备或系统58的响应以关断设备或系统、接通设备或系统、增加设备或系统的可调整和可测量属性或减少设备或系统的可调整和可测量属性。
85.图3b示出具有力传感器40的玻璃层压体10的实施方式,所述力传感器40被配置来经由信号62与装置或系统58通信(致动或调整所述装置或系统58)。来自具有力传感器40的玻璃层压体10的信号62可生成对设备或系统58的响应以关断设备或系统、接通设备或系统、增加设备或系统的可调整和可测量属性或减少设备或系统的可调整和可测量属性。
86.图4a示出配置在层压体10中的通道50的实施方式,(例如,所述通道50的大小被设定成足以保持电线并沿着层压体10的一部分(外部边缘)向电连接部48引导所述电线。
87.图4b示出配置在层压体10中的孔52的实施方式,(例如,所述孔52的大小被设定成足以保持电线并从层压体10内侧向层压体10外侧引导电线,使得可引导来自力传感器40的
致动的信号62以控制设备或系统58,如本文所阐述。
88.图4c示出配置在层压体10的基板34(例如,基板主体)中的传感器孔56的实施方式,其中力传感器40定位在所述传感器孔中。
89.参考图4a至图4c,在一些实施方式中,通道被配置在层压体中的一定位置中,以使得电线能够从传感器穿过层压体延伸到来自层压体的外边缘/出口点。在一些实施方式中,孔是电线在层压体主体中的出口点。在一些实施方式中,层压体层孔是定位在现有基板层内的通孔或开口,使得传感器能够定位在基板层的横截面厚度内。在该实施方式中,传感器横截面厚度不会不必要地增加层压体总体厚度;相反,传感器凹入在基板横截面厚度内。在一些实施方式中,传感器孔被配置用于定位在相邻间隔物层中的传感器。在一些实施方式中,设备或系统是经由传感器/开关的致动控制的部件或构件。
90.实施例:具有力传感器的层压体设备的描述
91.如图所示的典型玻璃层压体可被认为是两个层压体中的一个层压体:如图所示的顶部叠层和底部叠层。顶部叠层是(例如,经由像光学清透粘合剂(oca)的粘合剂)层压在衬料基板(例如,固体背衬,诸如0.45mm钢或0.40mm高压层压体)上以给予顶部叠层结构刚度和强度的玻璃层(例如,一块薄玻璃,诸如0.2mm厚的玻璃)。顶部叠层是独立成套的并且可自行处置。
92.底部叠层由通常不包含玻璃的层压体制成,并且它可以许多不同方式构造以适应各种应用的需要。例如,底部叠层可由用于建筑用途的建筑物结构材料制成,或者它可由用于汽车用途的汽车级材料制成。对于建筑用途,在图中示出包括基板主体(例如,中密度纤维板或mdf)和主体背衬基板(例如,钢)的典型的底部叠层。基板主体部件的其他非限制性示例包括高压层压体(hpl),或者三电池(tricell)也可用于底部叠层的构造。像顶部叠层那样,底部叠层也是独立成套的并且可自行处置。顶部叠层可使用压敏粘合剂(psa)、转印胶带或在适当位置熔化和固化的粘合剂来固定到底部叠层。
93.实施例:willow玻璃层压体力传感器的原型。
94.一系列玻璃层压体构建体(原型)利用定位在顶部叠层与底部叠层之间的力传感器完成,如图5a至图9b所示,以便评估电阻与力曲线的关系并且理解具有各种力传感器和间隔物与无间隔物配置的层压体的动态范围。
95.构建体具有恒定的顶部叠层配置和底部叠层配置。willow玻璃用作顶部叠层的最上层、顶层(例如,致动发生在willow表面上)。顶部叠层由willow玻璃和钢制成。底部叠层用中密度纤维板制成。顶部叠层的厚度为约1.35mm,底部零件的厚度为约13.5mm。顶部叠层和底部叠层两者的大小均为300x300mm。在顶部叠层与底部叠层之间利用两个力传感器(由interlink electronics制得的抗力传感器(fsr型号406))。
96.每个力传感器被配置成与电阻控制的led输出电路电通信,所述输出电路根据所施加的电压接通多个led。虽然该电路被设计用于在fsr力传感器中使用,但它在willow层压体原型中的利用示出,在willow层压体的顶部叠层上施加力产生对应的效果(与fsr力传感器相比),并且通过在willow层压体的顶部上(在力传感器位置处)利用手指压力施加压力来致动—接通和关断—一系列led。
97.fsr406力传感器为43.7平方毫米,其中有效面积为39.6平方毫米。传感器厚度为0.46mm。传感器具有用于将两个传感器在两个位置处固定到底部叠层的粘合剂表面。
98.构造了具有间隔物配置和对应的测量动态范围的五个玻璃层压体,如在下文并且在附图5a至图9b中所阐述。
99.构建体1:顶部叠层和底部叠层在没有使用任何间隔物的情况下利用其间的力传感器固定在一起。在层压体的制造过程中,部件被粘合在一起并施加力,这导致内置到嵌入式力传感器的剩余应变。内置应变将减小层压体的电阻以及力传感器在玻璃层压体中的所得动态范围。
100.构建体2:顶部叠层和底部叠层利用其间的力传感器和利用定位在顶部叠层与底部叠层之间的间隔物固定在一起。利用构建体2,间隔物太薄(例如,相邻间隔物厚度小于力传感器厚度),因此顶部叠层影响力传感器上的应变,即使在没有施加外部力(例如,无致动力)的情况下也是如此,这减小传感器(在零施加力下)的电阻并且继而减小传感器的动态范围。
101.构建体3:顶部叠层和底部叠层利用其间的力传感器和利用定位在顶部叠层与底部叠层之间的间隔物固定在一起。利用构建体3,间隔物太厚(例如,相邻间隔物厚度大于力传感器厚度),因此小致动力将不会致动力传感器。利用构建体3,看到任何电阻变化的阈值力是显著的,因为必须偏转顶部叠层以与力传感器接触。此外,施加到层压体外表面的最大力可能不足以使力传感器产生电阻(例如,当等量的力在传感器的表面处施加到所述传感器时,力传感器通常接合/致动)。构建体3的动态范围得以减小。
102.在构建体2和构建体3两者中,如果电路被制得以基于施加在玻璃层压体上的力控制设备,则操作点将在玻璃层压体(例如,具有多个传感器的单个大面板)中的零件与零件以及位置与位置之间不同。如果大表面积玻璃层压体与多个力传感器一起使用,并且如果顶部叠层与底部叠层之间的间距在点与点之间不同,则力传感器将具有不同施加力与信号输出特性,这是不期望的。在商业产品中,将呈现的零件到零件变化也是不期望的。
103.构建体4:顶部叠层与底部叠层之间的间距利用定制间隔物布置进行仔细地控制,使得在力传感器上不存在负荷(力、压力)条件,因为相邻间隔物厚度略大于(典型地《0.010英寸)力传感器的厚度。这种配置导致(a)力传感器与触摸力传感器的层压体表面(例如,顶部叠层的底部)之间的残余间距,和(b)减轻因制造层压体(例如,整合并安装叠层以形成层压体)而产生的力传感器中的残余应变。利用构建体4的配置,层压体在零施加力条件下表现得与力传感器本身基本上相似,并且电阻电平非常高(对于基于电阻的力传感器而言)。力传感器与当施加力时所述力传感器接触的内部表面之间的间隙足够小(《0.010英寸),使得需要顶部叠层的最小偏转就能看到电阻随施加力的变化。构建体4导致充当力(压力)传感器的玻璃层压体的可靠且可重复操作。
104.另外,取决于顶部叠层的刚度和构造,与利用构建体1-3相比,利用对应于构建体4的配置可实现更宽动态范围。
105.构建体5:顶部叠层与底部叠层之间的间距利用定制间隔物布置(包括相邻间隔物和致动间隔物两者)进行仔细地控制,使得在力传感器上不存在负荷(力、压力)条件,因为相邻间隔物厚度和致动间隔物(补充力传感器厚度)被配置成略大于(典型地《0.010英寸)力传感器的厚度。为了补充传感器厚度,选择厚度为0.508mm(例如,略厚于传感器厚度)的相邻间隔物(例如,由petg塑料制成的300x300mm间隔物)。相邻间隔物在每侧上利用0.150mm厚的粘合胶带附接到底板和顶板。相邻间隔物被切割成具有孔(例如,激光切口)以
便容放两个力传感器。
106.fsr406传感器层与间隔物层之间的高度差为0.348mm。作为微调间隙的方法,将致动间隔物(例如,0.25mm厚的辅助间隔物)放置在具有0.075mm粘合剂层的力传感器表面上。这在力传感器与顶部叠层的表面之间产生非常小间隙。当没有力(无致动事件)施加到玻璃层压体时,该间隙被配置来将力传感器保持在松弛状态(处于非常高的电阻电平)。
107.另外,由于间隙非常小,在致动事件中仅有少量的力能够偏转顶部叠层以在力传感器上生成力(例如,使得电阻可下降到非常低电平,从而在其中具有力传感器的层压体上赋予宽动态范围)。使用手指压力来施加力,最大电阻超过可测量值(》10欧姆),最小电阻约为300欧姆。
108.在实质上不脱离本公开内容的精神和各种原理的情况下,可对本公开内容上述实施方式做出许多变化和修改。所有此类修改和变化都意图在本文中包括在本公开内容的范围内并且受以下权利要求保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1