一种温度调节结构、控制器和移动工具的制作方法
1.本发明涉及电子元件温度控制技术领域,尤其涉及一种温度调节结构、控制器和移动工具。
背景技术:
2.无人驾驶汽车和无人清扫车等机械设备上,需要配备大功率、超高运算速度的自动驾驶运算模块。目前的自动驾驶运算模块从工业电子领域发展过来,还没有形成完全符合车规的自动驾驶运算模块。自动驾驶运算模块的工作温度为-20℃~70℃,而汽车整车要求的工作温度为-40℃~85℃,所以装备有自动驾驶运算模块的无人驾驶汽车和无人清扫车工作时对环境温度存在一定的局限性,不利于其大面积推广使用。
3.为保证自动驾驶运算模块在正常温度工作范围内运行,现有温度控制结构采用以下方案:
4.在低温环境状态(低于-20℃)下,在控制外壳上或者控制器内部粘贴pi电热膜,在低温时先启动pi电热膜将控制器整体进行加工,待整个控制器温度上升至-20℃之后再启动自动驾驶运算模块进行工作。由于pi电热膜的热阻较大,在模块高温的情况下会阻碍模块散热,因此pi电热膜不能直接贴到模块上,只能粘接到控制器壳体内部或者控制器壳体外侧,这样在低温启动模块时需要先使用pi加热整个控制器,通过整个控制器温度升高将热量到传到自动驾驶模块上使其温度升高,升高至-20℃时自动驾驶运算模块启动工作。粘贴pi电热膜会导致控制器体积增加,增加控制器成本,体积增大会降低控制器的适用性;该方案采用的是加热整个控制器而不是单独加热自动驾驶运算模块,加热效率低,在低温状态下控制器的启动时间会大大增加。
5.在高温环境状态时,控制器工作会放出大量的热(发热量主要集中在运算模块),为了满足运算模块的工作散热需求,在控制器周围增加散热风扇或者直接使用水冷却。使用散热风扇方案,包括风扇本身的成本、风扇线束以及其控制单元和组装费用、还有风扇的后期维护费用(风扇在长期的使用过程中扇叶容易积灰需要定期清理,风扇的使用寿命也低于控制器的使用寿命,因此在控制器的使用寿命中可能还需要替换风扇)。加装风扇也会导致控制器需要的安装空间增加使控制器在产品布置上存在一定的局限性。使用水冷方案需要做一套水循环系统,涉及到水箱、水泵、导管、散热器等零部件。
技术实现要素:
6.本发明的目的是针对现有技术所存在的缺陷,提供一种温度调节结构,该温度调节结构不需要额外的安装空间,也不需要进行产品的后期维护,可对温度待调节模块进行温度的调节,使得温度待调节模块适应不同的工作环境温度。
7.为实现上述目的,本发明提供了一种温度调节结构,所述温度调节结构包括第一壳体、半导体制冷片、温度传感器和温度控制模块;
8.所述第一壳体的上表面外侧具有多个热量交换凸起结构;
9.所述半导体制冷片的上表面与所述第一壳体的上表面内侧贴合,所述半导体制冷片的下表面与温度待调节模块贴紧;
10.所述温度传感器与所述温度待调节模块电连接;
11.所述温度控制模块与所述半导体制冷片电连接;
12.所述温度传感器采集所述温度待调节模块的温度数据,并将所述温度数据发送给所述温度控制模块;所述温度控制模块根据所述温度数据对所述半导体制冷片的电流和电压进行调节,从而实现对温度待调节模块的温度调节。
13.优选的,所述温度调节结构还包括导热模块;
14.所述导热模块设置在所述半导体制冷片与所述第一壳体的上表面内侧之间以及所述半导体制冷片与所述温度待调节模块之间。
15.优选的,所述温度调节结构还包括隔热模块;
16.所述隔热模块设置在所述半导体制冷片的四周。
17.优选的,所述温度调节结构还包括第二壳体;
18.所述第二壳体与所述第一壳体相扣合;所述第二壳体的侧壁具有固定结构。
19.优选的,所述多个热量交换凸起结构在所述第一壳体的上表面等距平行排列。
20.优选的,所述温度待调节模块设置在控制器的印刷电路装配板pcba上。
21.进一步优选的,所述第一壳体的一侧设有多个缺口;所述印刷电路装配板pcba的信号传输接口穿过所述缺口延伸至所述第一壳体的外侧;所述缺口高度小于所述第一壳体的侧壁的高度。
22.优选的,所述温度调节结构还包括电流方向调节模块和电源管理模块;
23.所述电流方向调节模块分别与所述半导体制冷片和所述温度控制模块电连接;
24.所述电源管理模块分别与所述半导体制冷片和所述温度控制模块电连接。
25.进一步优选的,所述温度控制模块根据所述温度数据对所述半导体制冷片的电流和电压进行调节具体包括:
26.所述温度控制模块判断所述温度数据落入预置的第一预设温度范围时,调整半导体制冷片的电流方向和电压,以控制所述半导体制冷片制冷;
27.所述温度控制模块判断所述温度数据落入预置的第二预设温度范围时,调整所述半导体制冷片的电流方向和电压,以控制所述半导体制冷片加热;
28.当温度控制模块判断所述温度数据落入预置的第三预设温度范围时,切断所述半导体制冷片的电压。
29.优选的,所述导热模块包括导热硅脂。
30.另一方面,本技术还提供一种控制器,包含前述任一实施例提供的温度调节结构。
31.最后一方面,本技术还提供一种移动工具,包含前述控制器。
32.本发明实施例提供的一种温度调节结构,将半导体制冷片设置在第一壳体和温度待调节模块之间设置,然后采用温度传感器实时监测温度待调节模块的工作温度数据,并将工作温度数据发送给温度控制模块,使得温度控制模块可以对半导体制冷片的电流方向和电压大小进行调节,从而调节半导体制冷片的工作状态,进而实现对温度待调节模块的温度调节,以适应不同的工作环境温度。
附图说明
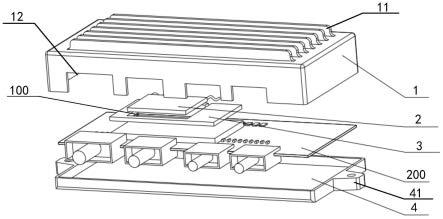
33.图1为本发明实施例提供的一种温度调节结构示意图。
具体实施方式
34.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
35.本发明提供的一种温度调节结构,可应用在移动工具上的控制器上,以实现对控制器的温度待调节模块的温度调节,使得温度待调节模块适应车辆工作的环境温度。以下均以对控制器的温度待调节模块进行温度调节进行说明本发明的技术方案。移动工具可以是任何可以移动的工具,例如车辆(例如乘用车、公交车、大巴车、厢式货车、卡车、载重车、挂车、甩挂车、吊车、挖掘机、铲土机、公路列车、扫地车、洒水车、垃圾车、工程车、救援车、物流小车、agv(automated guided vehicle,自动导引运输车)等)、摩托车、自行车、三轮车、手推车、机器人、扫地机、平衡车、天车、轮胎吊等,本技术对于移动工具的类型不做严格限定,在此不再穷举。
36.图1为本发明实施例提供的一种温度调节结构示意图,下面结合图1,对该温度调节结构进行说明。
37.如图1中所示,本发明实施例提供的一种温度调节结构包括:第一壳体1、半导体制冷片2、温度传感器(图中未示出)和温度控制模块(图中未示出)。
38.第一壳体1是该温度调节结构进行热量交换的主要结构。第一壳体1的上表面外侧具有多个热量交换凸起结构11。多个热量交换凸起结构11在第一壳体1的上表面等距平行排列,当然,本领域技术人员也可以根据实际需求灵活布局热量交换凸起结构11在第一壳体1上的排列结构,本技术不做严格限定。在一个具体的例子中,热量交换凸起结构11可以采用送风通道。本发明对此不作限定,只要满足温度调节结构的内部与外部可以进行热量交换的需求即可。
39.示例而非限定,第一壳体1的一侧设有多个缺口12,方便该温度调节结构的内部元器件与外界的连接,在一个具体的例子中,控制器的印刷电路装配板pcba200的信号传输接口穿过缺口12延伸至第一壳体1的外侧。缺口12高度小于第一壳体1的侧壁的高度,用以对内部的元器件进行限位。
40.半导体制冷片2是该温度调节结构的关键部件,其制冷面和制热面可以在电流方向改变的情况下,进行转换,并且半导体制冷片2具有一定的工作电压,只有满足其工作电压时,半导体制冷片2才会进入工作的状态。在一个具体的例子中,半导体制冷片2的工作电压为5v~12v。半导体制冷片2的上表面与第一壳体1的上表面内侧贴合,半导体制冷片2的下表面与温度待调节模块贴紧。具体的,控制器的运算模块设置在印刷电路装配板pcba200上,要满足自动驾驶的超高速运算,其功率非常大,是控制器中产热最多的部件,半导体制冷片2设置在温度待调节模块100与第一壳体1之间,无需对整个控制器进行升温或降温,直接对温度待调节模块100进行制冷或者制热,加快了热传导速率,热量损耗少。控制器中产生热量较大的主要集中在各运算模块中,温度待调节模块可以是控制器中的运算模块。
41.温度传感器可以实时监测温度,因此它与温度待调节模块电连接,在本例中温度传感器与温度待调节模块100电连接,可以采集温度待调节模块100的工作温度数据。
42.温度控制模块可以接收温度传感器发送的温度待调节模块100的工作温度数据,
并将该工作温度数据与预设温度范围集进行比较,根据比较结果实现对半导体制冷片2工作状态的控制。其中,预设温度范围集包括:第一预设温度范围、第二预设温度范围和第三预设温度范围。在一个具体的例子中,第一预设温度范围为不小于50℃;第二预设温度范围为不大于0℃;第三预设温度范围为0℃~50℃。需要说明的是,预设温度范围集是根据运算模块100的正常工作温度而定的。
43.具体的,在一个可选的实施例中,温度调节结构还包括电流方向调节模块(图中未示出)和电源管理模块(图中未示出);电流方向调节模块分别与半导体制冷片2和温度控制模块电连接;电源管理模块分别与半导体制冷片2和温度控制模块电连接。其中,电流方向调节模块具体为h桥电路,主要用来改变半导体制冷片2的电流方向,电源管理模块主要用来调节半导体制冷片2的电压大小以及通断。
44.在一个优选的例子中,温度调节结构还包括导热模块(图中未示出)。导热模块设置在半导体制冷片2与第一壳体1的上表面内侧之间以及半导体制冷片2与温度待调节模块100之间。导热模块具体可以采用导热硅脂,将导热硅脂涂覆在半导体制冷片2与第一壳体1的之间的缝隙中,或者半导体制冷片2与温度待调节模块100之间的缝隙中,这样可以提高第一壳体1、半导体制冷片2和温度待调节模块100之间的热传播效率。
45.在另一个优选的例子中,温度调节结构还包括隔热模块3。隔热模块3设置在半导体制冷片2的四周,主要用来将温度待调节模块100与第一壳体1间的缝隙填满,阻止第一壳体1与温度待调节模块100之间的热交换,减少了反向热传导,以提高半导体制冷片2调控温度待调节模块100温度的能力。隔热模块3可以采用隔热棉。
46.该温度调节结构还包括第二壳体4。第二壳体4设置在第一壳体1的下方,可以与第一壳体1相扣合,一方面使得温度调节结构整体紧凑;另一方面,方便温度调节结构内部的热量只能通过第一壳体1进行的交换,以达到快速降温或升温的效果。为方便该温度调节结构的固定,第二壳体4的侧壁具有固定结构41。
47.以上是对该温度调节结构的部件以及连接关系进行了描述。一般情况下,自动驾驶汽车的控制器的温度待调节模块的正常工作温度范围为-20℃~70℃,自动驾驶汽车的工作温度范围为-40℃~85℃。下面以该温度调节结构对温度待调节模块100的温度进行调节,使其适应自动驾驶汽车的工作温度为例进行说明该温度调节结构的工作原理。但是,并不表示该温度调节结构只能对温度待调节模块100的温度进行调节。
48.温度传感器采集温度待调节模块100的温度数据,并将温度数据发送给温度控制模块。温度控制模块将温度数据与预设温度范围集进行比较。根据比较结果,实现对温度待调节模块100的温度调节。
49.具体的,当温度数据落入第一预设温度范围时,温度控制模块生成第一控制信号,并将第一控制信号发送给电源管理模块和电流方向调节模块;电流方向调节模块根据第一控制信号接通半导体制冷片2;电源管理模块根据第一控制信号和预设的电压阈值范围对半导体制冷片2的电压进行控制。其中,第一控制信号可以理解为制冷信号。预设的电压阈值是根据半导体制冷片2的工作电压而定的,根据前述,本发明实施例中半导体制冷片2的工作电压为5v~12v。
50.在一个具体的例子中,当温度传感器采集到温度待调节模块100的温度达到50℃时,h桥电路在接收到温度控制模块发送的制冷信号时,将半导体制冷片2接通,使得半导体
制冷片2与温度待调节模块100接触的一面为制冷面。电源管理模块根据制冷信号和半导体制冷片2的工作电压,对半导体制冷片2的电压进行调节,使得半导体制冷片2开始工作,以控制半导体制冷片制冷,通过制冷面吸收温度待调节模块100的温度,对温度待调节模块100进行降温,再通过第一壳体1将热量释放到外部空间中。
51.当温度数据落入第二预设温度范围时,温度控制模块生成第二控制信号,并将第二控制信号发送给电源管理模块和电流方向调节模块;电流方向调节模块根据将第二控制信号改变半导体制冷片2的电流方向;电源管理模块根据将第二控制信号和预设的电压阈值范围对半导体制冷片2的电压进行控制,以控制半导体制冷片加热。其中,第二控制信号可以理解为加热信号。
52.在一个具体的例子中,当温度传感器采集到温度待调节模块100的温度达到0℃时,温度控制模块将加热信号发送给h桥电路,使其改变半导体制冷片2的电流方向,使其与温度待调节模块100接触的一面为制热面,通过制热面放出热量对温度待调节模块100进行升温,使得温度待调节模块100可以正常工作。电源管理模块的工作过程同制冷过程,在此不再赘述。
53.当温度数据落入第三预设温度范围时,温度控制模块生成第三控制信号,并将第三控制信号发送给电源管理模块,电源管理模块根据第三控制信号切断半导体制冷片2的电压。其中,第三控制信号可以理解为温度待调节模块100可以正常工作,即半导体制冷片2的非工作状态控制信号。
54.当温度传感器采集到温度待调节模块100的温度为0℃~50℃时,电源管理模块在接收到温度控制模块发送的半导体制冷片的非工作状态控制信号时,切断半导体制冷片2的电压,半导体制冷片2不工作,由此实现对温度待调节模块100温度的调节,使得其能适应自动驾驶汽车的工作环境。
55.本发明实施例提供的一种温度调节结构,将半导体制冷片设置在第一壳体和温度待调节模块之间设置,然后采用温度传感器实时监测温度待调节模块的工作温度数据,并将工作温度数据发送给温度控制模块,使得温度控制模块可以对半导体制冷片的电流方向和电压大小进行调节,从而调节半导体制冷片的工作状态,进而实现对温度待调节模块的温度调节,加快热传导速率,减少热量损耗,以适应不同的工作环境温度。
56.本技术实施例还提供一种控制器,包括前述任意一项实施例提供的温度调节结构。控制器可以是车规级控制器,也可以是计算机服务器系统。
57.本技术实施例还提供一种移动工具,包括前述控制器。
58.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1