用于COB自动组装的传输装置的制作方法
用于cob自动组装的传输装置
技术领域
1.本发明涉及一种cob自动组装领域,尤其涉及用于cob自动组装的传输装置。
背景技术:
2.cob(chip on board ,板上芯片)组装,是将芯片安装于线路板上的一种组装工艺,在将芯片组装于线路板上以后,一般还需要在芯片上固定盖子以对其进行保护。
3.传统的cob组装方法包括料件的上料、料件的点胶、料件的检测以及料件的下料等,而每一个步骤一般都会对应一个操作工位,比如点胶,待点胶产品置于工作载台上,利用点胶机构对其点胶,完成点胶后利用拾取模组进行拾取并传送至下一个工位。
4.工作载台、传送机构等占用较大空间,降低设备的空间利用率,进而增加了整个设备成本。
技术实现要素:
5.有鉴于此,本发明提供用于cob自动组装的传输装置,该传输装置中的传送模组可作为工作载台,无需单独的工作载台,提高设备的空间利用率。
6.为解决上述技术问题,本发明采用以下技术方案:一方面,根据本发明实施例的用于cob自动组装的传输装置,包括传输装置本体,所述传输装置本体包括:第一基台;传送模组,其安装于所述第一基台的边缘处,所述传送模组围绕用于cob自动组装的若干组装机构,所述传送模组用于传送载具,料件位于所述载具上;定位模组,其安装于所述传送模组上,所述定位模组用于将所述载具阻停于所述传送模组上,以使得所述组装机构对所述载具上的所述料件进行组装操作。
7.优选地,所述传送模组包括第一驱动组件、导轨和传送皮带,所述导轨与第一驱动组件固定安装于所述第一基台上,所述传送皮带匹配所述导轨,所述载具在所述第一驱动组件的驱动力下跟随所述传送皮带沿所述导轨方向运动。
8.优选地,所述定位模组包括阻挡组件与位置组件,所述阻挡组件用于阻停在所述传送模组上运动的所述载具,当所述阻挡组件将所述载具阻停后,所述位置组件嵌入所述载具中,以定位所述载具在所述传送模组上的位置,并同时使所述载具抬升后脱离所述传送模组。
9.优选地,所述阻挡组件包括第二基台、第二驱动组件和阻挡块,所述第二基台与所述导轨固定连接,所述第二基台位于所述载具下方,所述第二驱动组件固定安装于所述第二基台上,所述阻挡块在所述第二驱动组件的驱动力下在竖直方向上做往复运动,以阻挡或远离所述载具。
10.优选地,所述位置组件包括第三基台、第三驱动组件和限位组件,所述第三基台固定安装于所述导轨上,所述第三驱动组件安装于所述第三基台上,所述限位组件在所述第
三驱动组件的驱动力下限定所述载具在所述导轨上的位置。
11.优选地,所述限位组件包括弧形结构的第一限位件,所述第一限位件连接所述第三驱动组件;当所述阻挡组件阻停所述载具时,所述第一限位件的中心轴线在竖直方向上高于所述载具上设有的限位孔的圆心所在的水平线,所述第一限位件在所述第三驱动组件的驱动力下插入所述限位孔内,以定位所述载具并将其进行抬升第一距离;其中,所述第一距离为所述第一限位件的中心轴线与所述限位孔的圆心在竖直方向上的落差值。
12.优选地,所述限位组件还包括第二限位件,所述第二限位件匹配所述载具上设有限位槽,所述第二限位件与所述第一限位件相对设置,当所述第一限位件插入所述限位孔的同时,所述第二限位件插入所述限位槽。
13.优选地,所述传输装置本体还包括搬运模组,所述搬运模组固定安装于相邻的两个所述传送模组之间,所述搬运模组用于将所述传送模组上的所述载具搬运至与其相邻的所述传送模组上。
14.优选地,所述搬运模组包括升降组件与旋转组件,所述旋转组件安装于所述升降组件上方,所述升降组件用于使得所述载具做升降运动,所述旋转组件用于使得所述载具从一所述传送模组上移至与另一所述传送模组上。
15.优选地,所述旋转组件包括第四驱动组件、旋转板和旋转轴,所述旋转轴的一端活动连接所述第四驱动组件,另一端固定连接所述旋转板,所述旋转板在所述第四驱动组件的驱动力下跟随所述旋转轴做旋转运动;所述升降组件包括第五驱动组件与升降件,所述第五驱动组件与所述第一基台固定连接,所述升降件的一端活动连接所述第五驱动组件,另一端固定连接所述第四驱动组件,所述旋转组件在所述第五驱动组件的驱动力下跟随所述升降件沿竖直方向做运动,以抬起或放下所述载具。
16.本发明的上述技术方案至少具有如下有益效果之一:本发明公开的用于cob自动组装的传输装置,该传输装置利用定位模组将载具阻停于传送模组上,传送模组当作工作载台,无需设置单独的工作载台放置载具,大大提高了cob自动组装设备的空间利用率;另外,利用搬运模组将载具从一个传送模组上搬运至另一传送模组上,大大降低了传输装置的传输成本。
附图说明
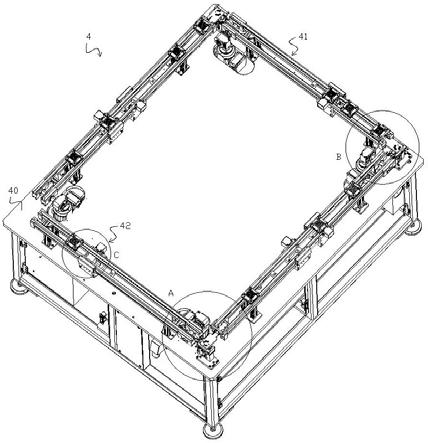
17.图1为本发明实施例中料件与线路板组装后的结构示意图;图2为本发明实施例中载具的结构示意图;图3为本发明实施例提供的用于cob自动组装的传输装置的整体结构示意图;图4为图3中a处的放大图;图5为图3中c处的放大图;图6为图3中b处的放大图;图7为本发明实施例提供的用于cob自动组装的传输装置中的搬运模组的结构示意图。
18.附图标记:21、载具;22、线路板;23、料件;213、固定针;211、限位孔;212、限位槽;4、传输装置
本体;40、第一基台;41、传送模组;4111、第一导轨;4112、第二导轨;412、第一驱动组件;413、传送皮带;42、定位模组;421、第二基台;422、阻挡块;423、第三基台;424、第一限位件;425、第二限位件;43、搬运模组;431、旋转组件;4311、旋转板;4312、传感器;4313、固定支架;4314、旋转轴;4315、第四驱动组件;432、升降组件;4321、升降件;4322、第五驱动组件。
具体实施方式
19.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
20.本发明实施例提供一种用于cob自动组装的传输装置,该传输装置利用定位模组42将传送中的载具21阻停并定位在传送模组41上,用于cob自动组装的若干组装机构对传送模组41上的料件23进行组装操作,也就是说将传送模组41当作工作载台,无需单独的工作载台,提高cob自动组装设备的空间利用率。
21.关于cob自动组装,为了便于说明,如图1所示,即利用若干组装机构将料件23组装在线路板22上,一般将若干个料件23阵列组装在一个较大的线路板22上。
22.如图2所示,为了配合传送模组41与定位模组42,将线路板22固定于载具21上,载具21在传送模组41的作用下在不同组装机构之间传输。具体的,在载具21上设有固定针213,固定针213匹配线路板22上的固定孔,固定针213套装于固定孔内使得线路板22固定于载具21上。
23.下面首先结合附图具体描述根据本发明实施例的用于cob自动组装的传输装置。
24.具体的,如图3所示,本发明实施例提供的用于cob自动组装的传输装置包括传输装置本体4,传输装置本体4包括第一基台40、传送模组41和定位模组42,传送模组41安装于第一基台40的边缘处,传送模组41围绕用于cob自动组装的若干组装机构,传送模组41用于传送载具21,料件23位于载具21上。
25.也就是说,传送模组41位于若干组装机构的周边,组装机构(图中未显示)即是用于将料件23组装于线路板22上的机构,比如:点胶机构。
26.定位模组42安装于传送模组41上,定位模组42用于将载具21阻停于传送模组41上,以使得若干组装机构对载具21上的料件23进行组装操作,比如:点胶操作。
27.在一实施例中,如图4所示,传送模组41包括第一驱动组件412、导轨和传送皮带413,导轨与第一驱动组件412固定安装于第一基台40上,传送皮带413匹配导轨,载具21在第一驱动组件412的驱动力下跟随传送皮带413沿导轨方向运动。第一驱动组件412优选为电机,当然并不仅限定为电机。
28.也就是说,载具21在电机的驱动下跟随传送皮带413沿导轨运动,以使得料件23传送至不同的组装机构处并完成组装操作。
29.作为优选的,导轨包括第一导轨4111与第二导轨4112,第一导轨4111与第二导轨4112之间有空间,第一导轨4111与第二导轨4112分别匹配一传送皮带413,载具21在第一驱动组件412的驱动力下跟随两个传送皮带413运动。
30.在一实施例中,定位模组42包括阻挡组件与位置组件,阻挡组件用于阻停在传送
模组41上运动的载具21,当阻挡组件将载具阻停后,位置组件嵌入载具中,以定位载具在传送模组42上的位置,并同时使得载具抬升后脱离传送模组41。
31.进一步的,如图5所示,阻挡组件包括第二基台421、第二驱动组件和阻挡块422,第二基台421与所述导轨固定连接,第二基台421位于载具21的下方,第二驱动组件固定安装于第二基台421上,阻挡块422在第二驱动组件的驱动力下在竖直方向上做往复运动,以阻挡或远离载具21。第二驱动组件优选为气动电磁阀,当然并不仅限定为气动电磁阀。
32.也就是说,当载具21需要停止在传送模组41上时,阻挡块422在第二驱动组件的驱动力下向上运动以阻挡载具21。优选的,第二基台421固定安装于第一导轨4111与第二导轨4112之间。
33.进一步的,位置组件包括第三基台423、第三驱动组件和限位组件,第三基台423固定安装于导轨上,第三驱动组件安装于第三基台423上,限位组件在第三驱动组件的驱动力下限定载具21在导轨上的位置。第三驱动组件优选为电磁阀,当然并不仅限定为电磁阀。当阻挡组件将载具阻停后,限位组件在第三驱动组件的驱动力下嵌入载具21中,以定位载具21在传送模组41上的位置,并同时使载具21抬升后脱离传送模组41,限位组件提高了载具21在传送模组41上的定位精度。限位组件在将载具21抬升离开传送模组41后,避免了该工位的载具影响其他工位的载具的传送。
34.在一实施例中,如图2和图5所示,限位组件包括弧形结构的第一限位件424,第一限位件424连接第三驱动组件;当阻挡组件阻停载具21时,第一限位件424的中心轴线在竖直方向上高于载具21上设有的限位孔211的圆心所在的水平线,第一限位件424在第三驱动组件的驱动力下插入限位孔211内,以定位载具21并将其进行抬升第一距离;其中,第一距离为第一限位件424的中心轴线与限位孔211的圆心在竖直方向上的落差值。
35.需要说明的是:虽然第一限位件424的中心轴线与限位孔211的圆心不在同一水平线上,基于第一限位件424为弧形结构且二者之间的落差值很小,弧形结构的第一限位件424在第三驱动组件的驱动力下容易滑入限位孔211。限位组件不仅提高载具在传送模组上的定位精度,且同时实现抬升载具离开传送模组以提高定位模组的定位效率。
36.进一步的,限位组件还包括第二限位件425,第二限位件425匹配载具21上设有限位槽212,第二限位件425与第一限位件424相对设置,当第一限位件424插入限位孔211的同时,第二限位件425插入限位槽212。第一限位件424与第二限位件425从载具21两侧同时进行定位,提高载具21在传送模组41上的定位精度与定位稳定性。
37.也就是说,第一限位件424与第二限位件425插入限位孔211与限位槽212内,限定载具21停止在传送模组41上的位置的同时还将载具21抬升第一距离使得载具21脱离传送皮带413。限位组件不仅提高了载具21停止在传送模组41上的位置精度,进一步提高了组装机构的组装精度,而且载具21脱离传送皮带413避免影响传送皮带413传送其他载具21。
38.在一实施例中,传输装置本体4包括若干传送模组41,若干传送模组41形成多边形结构。若干传送模组41可形成如图3所示的四边形,还可以形成五边形、六边形等,若干传送模组41形成多边形的边数根据具体的组装机构的数量以及布局进行设定,本发明实施例不做限定。
39.一般的,圆弧形导轨可实现两个方向的传送,但是圆弧形导轨的制作成本较高,本发明实施例利用搬运模组43实现载具21传送方向的改变,以降低传输装置的传输成本。
40.具体地,如图6所示,传输装置本体4还包括搬运模组43,搬运模组43固定安装于相邻的两个传送模组41之间,搬运模组43用于将传送模组41上的载具21搬运至与其相邻的传送模组41上。也就是说,利用搬运模组43代替圆弧形导轨,实现载具21在两个方向的传送。
41.进一步的,搬运模组43包括升降组件432与旋转组件431,旋转组件431安装于升降组件432上方,升降组件432用于使得载具21做升降运动,旋转组件431用于使得载具21从一传送模组41上移至与另一传送模组41上。
42.也就是说,升降组件432用于将载具21抬起或放下,旋转组件431用于使得抬起的载具21做旋转运动,以实现载具21从一个传送模组41上移至与其相邻的传送模组41上。
43.进一步的,如图7所示,旋转组件431包括第四驱动组件4315、旋转板4311和旋转轴4314,旋转轴4314的一端活动连接第四驱动组件4315,另一端固定连接旋转板4311,旋转板4311在第四驱动组件4315的驱动力下跟随旋转轴4314做旋转运动。第四驱动组件4315优选为旋转气缸,当然并不仅限定为旋转气缸。
44.升降组件432包括第五驱动组件4322与升降件4321,第五驱动组件4322与第一基台40固定连接,升降件4321的一端活动连接第五驱动组件4322,另一端固定连接第四驱动组件4315,旋转组件431在第五驱动组件4322的驱动力下跟随升降件4321沿竖直方向做运动,以抬起或放下载具21。第五驱动组件4322优选为气缸,当然并不仅限定为气缸。
45.也就是说,当载具21运动至一传送模组41的末端,旋转板4311在第五驱动组件4322的驱动下将载具21抬起并离开导轨,随后旋转板4311在第四驱动组件4315的驱动力做旋转至另一传送模组41的上方,接下来旋转板4311再次在第五驱动组件4322的驱动力下向下运动,以使得载具21运动至导轨上,载具21在第一驱动组件412的驱动力下沿导轨方向继续运动。旋转板4311在第四驱动组件4315的驱动力下旋转的角度即是若干传送模组41形成的多边形的内角的角度,比如:四边形,则旋转板4311旋转的角度为90
°
。
46.在一实施例中,如图7所示,搬运模组43还包括传感器组件,传感器组件固定安装于旋转板4311上,当传感器组件感应到载具21时,搬运模组43搬运载具21。
47.具体的,传感器组件包括传感器4312与固定支架4313,传感器4312固定安装于固定支架4313上,固定支架4313固定安装于旋转板4311上,如图6所示,固定支架4313还起到阻挡载具21运动的作用,也就是说,当载具21在传送模组41上运动至导轨的末端,则载具21将接触固定支架4313,固定支架4313阻挡载具21继续运动,且传感器4312感应到载具21的位置。传感器4312优选为接触式传感器,当然并不仅限为接触式传感器。
48.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1