一种针对惯性环节的新型运算放大补偿电路及其控制系统
1.本发明属于自动控制领域,具体涉及一种针对惯性环节的新型运算放大补偿电路及其控制系统。
背景技术:
2.惯性环节在控制系统中普遍存在。比如,由于感性电机的等效电阻和电枢电感造成的电流响应的惯性环节和由各种机械结构造成的惯性环节等。对于控制系统而言,惯性环节会造成相位滞后并影响控制带宽。因此,为提高系统动态响应能力,对其补偿十分重要。
3.传统的补偿方法通常是基于闭环控制系统。将传感器信号反馈回控制单元再进行闭环校正。但是,传感器的噪声等因素会限制闭环控制系统的带宽,从而妨碍了系统动态响应能力的进一步提高。同时,传感器的使用也无疑增加了系统的成本和复杂度。
4.针对上述情况,本发明提出了一种针对惯性环节的新型运算放大补偿电路。针对惯性环节造成的相位滞后,这种电路可在没有传感器的情况下对相位滞后进行补偿,并提高控制系统带宽。由于避免了传感器噪声的影响,从而可以通过提高增益获得很高的补偿能力。并且其补偿能力可由运放中的一对电阻自由调节,设计简单方便。同时,这种电路用一个ad8676的运放即可实现,成本极低。
技术实现要素:
5.本发明的目的在于:通过运算放大器,在不需要传感器的基础上,对控制系统中的惯性环节进行补偿,从而提升系统动态响应能力。
6.本发明采用的技术方案为:
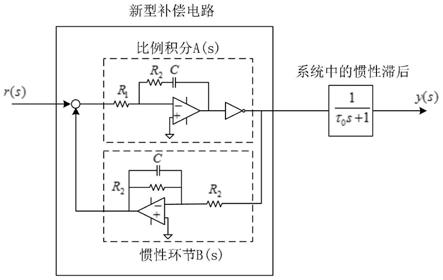
7.一种针对惯性环节的新型运算放大补偿电路所述补偿电路,其包括一个同相放大的比例积分环节a(s)和一个负反馈惯性环节b(s),所述补偿电路串联于被控对象的惯性滞后环节之前,从而对惯性滞后进行补偿;
8.其中,所述补偿电路的负反馈惯性环节b(s)的增益为1,且其时间常数和被控对象的相位滞后相同,即:
[0009][0010]
其中,比例积分环节a(s)的增益设计为k,且其时间常数和被控对象的相位滞后相同,即:
[0011][0012]
其中,τ0代表被控对象惯性滞后的相位常数;
[0013]
所述比例积分环节a(s)包括运算放大器、一个第一电阻r1、一个第二电阻r2和电容
c;
[0014]
所述负反馈惯性环节b(s)包括运算放大器、两个第二电阻r2和电容c;
[0015]
当r2=nr1时,即可将系统的相位滞后减少至原来的1/n。
[0016]
本发明还提供了以下技术方案:
[0017]
一种包括上述一种针对惯性环节的新型运算放大补偿电路的控制系统,所述补偿电路串联于控制系统中被控对象的惯性滞后环节之前,从而对惯性滞后进行补偿;
[0018]
经所述补偿后,所述控制系统的最终响应特性为:其中τ
′0=1/k,r(s)和y(s)分别代表系统的输入控制信号和输出响应信号;当1/k<<τ0时,即能够减小相位滞后,提高系统响应带宽;
[0019]
其中,
[0020]
τ0=r2c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0021]
τ
′0=r1c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)。
[0022]
根据上述技术方案,因此只要使1/k<<τ0即可极大的减小相位滞后,提高系统响应带宽;又由于τ0=r2c,τ
′0=r1c,因此,当r2=nr1时,即可将系统的相位滞后减少至原来的1/n,由此可见该电路设计可以有效补充有惯性环节产生的相位滞后,并且十分简洁。
[0023]
本发明与现有技术相比具有如下优点:
[0024]
(1)不需要传感器,因此避免了噪声对补偿电路的影响;
[0025]
(2)设计简单方便,仅通过调节一组增益即可控制补偿效果;
[0026]
(3)设计成本低,通过少量运算放大器实现了对惯性滞后的补偿。
附图说明
[0027]
图1是本发明一种针对惯性环节的新型运算放大补偿电路的结构框图;
[0028]
图2是实验验证示意图;
[0029]
图3是在不同的n值下,本发明对惯性环节的补偿效果。
具体实施方式
[0030]
下面结合附图以及具体实施方式进一步说明本发明。
[0031]
图1所示为本发明一种针对惯性环节的新型运算放大补偿电路的结构框图,该新型运算放大补偿电路包括一个同相放大的比例积分环节a(s)和一个负反馈惯性环节b(s),所述补偿电路串联于被控对象的惯性滞后环节之前,从而对惯性滞后进行补偿;
[0032]
其中,所述补偿电路的负反馈惯性环节b(s)的增益为1,且其时间常数和被控对象的相位滞后相同,即:
[0033][0034]
其中,比例积分环节a(s)的增益设计为k,且其时间常数和被控对象的相位滞后相同,即:
[0035][0036]
其中,τ0代表被控对象惯性滞后的相位常数;
[0037]
所述比例积分环节a(s)包括运算放大器、一个第一电阻r1、一个第二电阻r2和电容c;
[0038]
所述负反馈惯性环节b(s)包括运算放大器、两个第二电阻r2和电容c;
[0039]
当r2=nr1时,即可将系统的相位滞后减少至原来的1/n。
[0040]
本发明还提供了一种包括上述新型运算放大补偿电路的控制系统,所述补偿电路串联于控制系统中被控对象的惯性滞后环节之前,从而对惯性滞后进行补偿;
[0041]
经所述补偿后,所述控制系统的最终响应特性为:其中τ
′0=1/k,r(s)和y(s)分别代表系统的输入控制信号和输出响应信号;s为拉普拉斯算子;当1/k<<τ0时,即能够减小相位滞后,提高系统响应带宽;
[0042]
其中,
[0043]
τ0=r2c
ꢀꢀꢀꢀ
(3)
[0044]
τ
′0=r1c
ꢀꢀꢀꢀꢀꢀ
(4)
[0045]
将本发明一种针对惯性环节的新型运算放大补偿电路的设计原理、过程和效果说明如下:
[0046]
步骤1:通过扫频或查看手册参数等方式,确定系统中存在的惯性环节的时间常数τ0。
[0047]
步骤2:根据图1搭建补偿电路,并将其串联到控制电路中。
[0048]
步骤3:根据公式(3)确定电阻r2和电容c的参数。
[0049]
步骤4:确定想要的补偿效果。如想要控制带宽提高n倍,相位滞后减少至原来的1/n,则令r2=nr1。
[0050]
为验证本发明的效果,搭建了一套直流力矩电机控制系统。它由控制器,本发明所述的补偿电路、电机驱动器、电流传感器和工作电脑组成。通过在工作电脑中,计算控制器发出信号和电流传感器反馈信号的比值,计算电流的动态响应特性。通过该系统,在不使用补偿电路和使用补偿电路的情况下对比电机的电流动态响应特性,从而证明本发明的有效性。
[0051]
当不使用补偿电路时,电机的电流动态响应特性如图3中的实线所示。可以看出,由于电枢电感和等效电阻的作用,其电流特性表现为惯性环节,响应带宽约为99hz。通过调节电阻r1,分别令n取值为n1=5,n2=10。由图3中的两条虚线可以看出,当n1=5时,电流的响应带宽提升了约5倍。而当n2=10时,响应带宽提升了约10倍,其中,带宽的误差来源主要为控制器的采样滞后。综上可知,实验结果和理论分析一致,证明了本发明的有效性。
[0052]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,这些实施例仅仅是为了说明的目的,而并非为了限制本发明的范围。本发明的范围由所附权利要求及其等价物限定。不脱离本发明的范围,本领域技术人员可以做出多种替代和修改,这些替代和修改都应落在本发明的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1