振荡器电路的制作方法
1.本发明涉及一种具有有源偏置电路部分的可切换振荡器电路,特别地但非排他性地涉及适合于供脉冲雷达运动传感器使用的振荡器,并且涉及包括具有有源偏置电路的可切换振荡器的这样的传感器。
背景技术:
2.已知使用各种不同的传感器类型通过参考检测物体和/或移动来检测存在性。例如,传感器处于用于其中要期望检测潜在入侵者的建筑物的安全系统的情境下。另外,还曾提出用于建筑物的存在性传感器装置,用于监测受监测区的占用状态和/或用于对存在于受监测区中的人的数量进行计数。除了安全应用之外,这种类型的感测用于标识在疏散期间的人的存在性或与建筑物系统(诸如,供暖、通风及空调(hvac)系统)的控制相关。在此情境下,将理解,建筑物可以是其中可能要求检测人的任何种类的结构或设施。
3.雷达运动传感器可以具有优于红外(ir)传感器的一些优点,诸如,所检测图像的提高的分辨率和检测入侵者在传感器的检测区内相对于传感器的存在性以及还有位置两者的能力。将理解,这然后在其中在受监测区内存在两个单独存在物的场合下允许与多个人的检测和在人或其它存在物(例如动物)之间的区分相关的改进。这关于ir传感器系统并非始终可能的。雷达传感器的另一优点是,无线电波能够穿透范围广泛的材料,包括用于建筑物的内墙和外墙的一些材料。这意味着,房间或甚至墙壁中的家具不可能防止雷达传感器检测位于墙壁的另一侧上或以某另一种方式在可见视线方面被阻碍的受监测区中的入侵者。尽管如此,已知的雷达传感器仍然具有一些限制,并且基于改进的雷达的传感器装置是期望的。
4.典型地,这样的雷达运动传感器包括振荡器,其中该振荡器是用于雷达检测的rf信号(特定地,微波信号)的来源。该振荡器是这样的雷达运动传感器的关键组件,并且定义雷达的特性。在利用脉冲调制的大多数雷达应用中,灵活可切换振荡器是高度地重要的,以便提供优良的距离分辨率并且减少功耗。
5.为了检测目标的运动,雷达运动传感器典型地利用所检测的多普勒漂移。本领域技术人员将理解,多普勒漂移是其中所传送的信号的反射频率与入射的所传送的信号的频率相比增大或减小的现象,其中在频率上的漂移取决于目标的速度。然而,为了使其起作用,对于系统重要的是,具有相对低的“相位噪声”,即,在信号的相位上的波动。
6.在检测到具有小的多普勒频移的目标(例如,缓慢移动的目标、爬行的目标或沿着切线路径移动的目标)时,针对对于雷达运动传感器中的微波信号的低相位噪声的要求是尤其重要的。
7.本身在本领域中已知的一些解决方案利用具有锁相环路(pll)的电压受控振荡器(vco)。使用vco和pll的布置可以提供优异的频率稳定性和低相位噪声。然而,申请人已理解,pll相对慢,其中启动时间典型地超过3
ꢀµ
s,并且,在一些情况下,达到大约200
ꢀµ
s。该慢启动时间意味着这样的布置不适合于高频操作,在所述高频操作中振荡器在脉冲激发的模
式下被操作,因为,接通所耗费的时间超过期望的脉冲持续时间。使用pll的一些传感器采用调频的连续波(fmcw)调制,然而,这由于相关联的高功耗而不适于电池或低功率应用。
8.已理解,在电池操作的装置中,来自电池的标称供应电压可能随着电池耗尽并且在电池的寿命内下降。该降低的“电压稳定性”可以导致基于晶体管的振荡器中的问题,因为,振荡器的频率和输出功率取决于来自电池的供应电压。
9.因此,申请人已理解需要特别非常适合于雷达运动传感器的具有低相位噪声的灵活可切换振荡器,以便给这样的传感器提供有改进的距离分辨率、缓慢移动的目标检测、并且减少功耗。例如,具有快速启动时间、低相位噪声以及改进的电压稳定性的振荡器将对现代的雷达运动传感器高度地有益,以改进其性能。
10.存在专用于较低频率(例如,小于3 ghz的uhf带)的rf振荡器的本身在本领域中已知的一些布置,所述rf振荡器利用有源偏置电路,以便减少其相位噪声。然而,这些一般提供低质量因子(也被称为“q因子”或简称为“q”)谐振器,并且并非非常适合于较高频率的(例如微波)应用。因此,申请人已理解,提供具有更适于供微波(仅通过示例的方式,大约10 ghz)振荡器使用的有源偏置电路的可切换振荡器将是特别地有利的。
技术实现要素:
11.在从第一方面观察时,本发明提供一种振荡器电路,该振荡器电路包括:振荡器晶体管,所述振荡器晶体管具有相应的第一端子、第二端子以及控制端子,所述振荡器晶体管布置成在所述振荡器晶体管的第一端子处生成微波振荡信号;表面集成波导谐振器,所述表面集成波导谐振器连接到振荡器晶体管的第二端子;以及有源偏置电路部分,所述有源偏置电路部分包括振荡器晶体管的第一端子与振荡器晶体管的控制端子之间的负反馈布置,有源偏置电路部分布置成将偏置电流供应到振荡器晶体管的控制端子,其中所述偏置电流取决于振荡器晶体管的第一端子处的电压乘以负增益。
12.本发明的该第一方面扩展到包括上文中所概述的振荡器电路的脉冲雷达运动传感器,其中脉冲雷达运动传感器布置成将所述微波振荡信号传送到外部环境并且布置成接收所述微波振荡信号的反射。
13.因此,本发明的第一方面扩展到一种脉冲雷达运动传感器,该脉冲雷达运动传感器包括振荡器电路,该振荡器电路包括:振荡器晶体管,所述振荡器晶体管具有相应的第一端子、第二端子以及控制端子,所述振荡器晶体管布置成在所述振荡器晶体管的第一端子处生成微波振荡信号;表面集成波导谐振器,所述表面集成波导谐振器连接到振荡器晶体管的第二端子;以及有源偏置电路部分,所述有源偏置电路部分包括振荡器晶体管的第一端子与振荡器晶体管的控制端子之间的负反馈布置,有源偏置电路部分布置成将偏置电流供应到振荡器晶体管的控制端子,其中所述偏置电流取决于振荡器晶体管的第一端子处的电压乘以负增益;其中脉冲雷达运动传感器布置成将所述微波振荡信号传送到外部环境并且布置
成接收所述微波振荡信号的反射。
14.因此,本领域技术人员将理解,本发明的实施例提供与本身在本领域中已知的常规振荡器电路比较而可以表现出改进的相位噪声特性的改进的振荡器电路和包括该振荡器电路的雷达运动传感器。由有源偏置电路提供的负反馈可以有利地起作用使振荡器晶体管的dc偏置电压稳定、减少振荡器的参数的退化,振荡器的参数的退化与高-q siw谐振器一起来减少相位噪声。由于在相位噪声的方面减少,因此振荡器可以提供缓慢移动的目标的改进的检测。通过非限制性示例的方式,本发明的振荡器可能能够检测以小于0.1 m/s移动的目标。
15.与常规振荡器比较,根据本发明的实施例的振荡器还可以表现出改进的启动时间,因为将功率切换到有源偏置电路也将功率切换到振荡器晶体管。通过切换有源偏置电路以调制供应到振荡器晶体管的控制端子的电流,可以实现比有可能通过切换振荡器晶体管的供应电压(v
cc
)更快的切换速度。例如,振荡器可以实现小于10 ns的启动时间,并且在一些情况下,小于4 ns,例如小于2.3 ns。在启动时间上的该显著缩短(与和常规振荡器相关联的0.5-3
ꢀµ
s启动时间和对于将vco与pll组合利用的解决方案的3-200
ꢀµ
s启动时间比较)可以有利地提供在利用本发明的振荡器的脉冲雷达运动传感器的距离分辨率上的改进。通过非限制性示例的方式,可以实现小于2 m的距离分辨率。
16.另外,如上文中所概述的,常规雷达运动传感器可能具有比在其它情况下(特别地,在电池供电的装置内使用的情况下)可能是期望的相关联的功耗更高的相关联的功耗。然而,本发明的布置可以跨过广范围的供应电压来提供振荡器的参数(例如,输出功率和频率)的改进的稳定性。这可能对电池供电的雷达运动检测器装置特别有益,因为,在电池被放电并且供应电压下降时,振荡器参数比常规布置的情况更低程度地被影响。本发明的振荡器还可以表现出改进的温度稳定性。
17.此外,根据本公开的振荡器可以以低成本实现,并且以相对地紧凑的布局实现。
18.本领域技术人员将理解,表面集成波导谐振器使用多层印刷电路板(pcb)、低温共烧陶瓷(ltcc)技术以及单片微波集成电路(mmic)来提供表现出相对高的质量因子和高可行性以及平面集成的腔。
19.振荡器晶体管是能够用作雷达运动传感器的输出的微波信号的源。虽然存在可以用于该组件的许多不同的晶体管技术,但在优选实施例中,振荡器晶体管包括双极结型晶体管(bjt)。本领域技术人员将理解,bjt典型地表现出非常低的闪变(1/f)噪声,这使得bjt非常适合于具有低相位噪声的振荡器。
20.在实施例的特定集合中,振荡器晶体管包括npn bjt。在这样的实施例的集合中,振荡器晶体管的第一端子是集电极端子,振荡器晶体管的第二端子是发射极端子,并且振荡器晶体管的控制端子是基极端子。因此,有源偏置电路提供负集电极-基极并联反馈布置,使得在集电极电流(以及类似地,跨过连接到集电极的电阻器的电压降)增大时,基极电流减小。
21.因此,小心设定dc电流的值、使晶体管的操作点稳定并且在低频率下提供负反馈可以减少振荡器的相位噪声。
22.如上文中所概述的,有源偏置电路提供负反馈环路,其中获取振荡器晶体管的第一端子(例如,在bjt的情况下是集电极)处的电压(或获取该电压的一部分),并且使该电压
经受负增益,以生成供应到振荡器晶体管的控制部(例如,在bjt的情况下是基极)的电流。因此,有源偏置电路充当定位于振荡器晶体管的第一端子与控制端子之间的负跨导放大器。
23.不同的拓扑结构能够用于有源偏置电路。然而,在实施例的集合中,有源偏置电路包括具有相应的第一端子、第二端子以及控制端子的第一反馈晶体管,所述第一反馈晶体管布置成使得:第一反馈晶体管的第一端子经由第一反馈路径连接到振荡器晶体管的第一端子;以及第一反馈晶体管的第二端子经由第二反馈路径连接到振荡器晶体管的控制端子。
24.第一反馈晶体管可以包括任何合适的晶体管。然而,在实施例的集合中,第一反馈晶体管包括pnp bjt,其中其第一端子是发射极端子,其第二端子是集电极端子,并且其控制端子是基极端子。
25.在实施例的集合中,第一反馈路径可以包括第一电阻器和第二电阻器,所述第一电阻器和第二电阻器布置成使得:第一电阻器的第一端子连接到供应电压;第一电阻器的第二端子连接到第一反馈晶体管的第一端子并且连接到第二电阻器的第一端子;以及第二电阻器的第二端子连接到振荡器晶体管的第一端子。
26.在这样的实施例的集合中,第一电容器可以在第一电阻器的第一端子与地之间连接。在可能重叠的实施例的集合中,第二电容器可以在第二电阻器的第二端子与地之间连接。第一电阻器和第二电阻器是设定集电极电流并且定义电压降v
cc-vc的集电极电阻器。这两个电阻器形成调节负反馈的“深度”的分压器。第一电容器是去耦电容器。第二电容器(当被提供时)与第二电阻器组合可以提供低通滤波特性,使得振荡器晶体管的第一端子处的高频信号通过第一反馈路径来衰减,以避免处于与操作频率不同的频率的不想要的寄生振荡。
27.第二反馈路径可以包括第三电阻器和第四电阻器,所述第三电阻器和第四电阻器布置成使得:第三电阻器的第一端子连接到第一反馈晶体管的第二端子;第三电阻器的第二端子连接到第四电阻器的第一端子并且连接到振荡器晶体管的控制端子;以及第四电阻器的第二端子连接到地。
28.该第三电阻器提供振荡器晶体管的集电极-基极反馈环路内的高频信号的额外衰减,以便避免处于与操作频率不同的频率的不想要的寄生振荡。第四电阻器可以改进振荡器的接通/切断时间。
29.因此,将理解,第一反馈晶体管和周围的反馈路径电路系统在低频下提供负并联反馈(例如,负集电极-基极并联反馈),以便使振荡器晶体管的dc电压和电流变化稳定,以使振荡器的参数的退化最小化、减小1/f闪变噪声、并且以减少相位噪声。
30.进一步的改进可以通过增大负反馈来实现。在一些实施例中,振荡器电路还包括具有相应的第一端子、第二端子以及控制端子的第二反馈晶体管,所述第二反馈晶体管布
置成使得:第二反馈晶体管的第一端子经由第五电阻器连接到供应电压;第二反馈晶体管的第二端子连接到第一反馈晶体管的控制端子;以及第二反馈晶体管的控制端子经由第三反馈路径连接到第一反馈晶体管的第一端子。
31.第二反馈晶体管可以有利地增大负反馈,以实现振荡器晶体管的更高的dc稳定性并且以进一步减少相位噪声。此外,第二反馈晶体管可以显著地改进振荡器晶体管的温度稳定性。
32.第二反馈晶体管可以包括任何合适的晶体管。然而,在实施例的集合中,第二反馈晶体管包括pnp bjt,其中其第一端子是发射极端子,其第二端子是集电极端子,并且其控制端子是基极端子。
33.第五电阻器可以具有连接到第二反馈晶体管的第一端子的第五电阻器的第一端子和连接到供应电压并且连接到第一反馈路径中的第一电阻器的第一端子的第五电阻器的第二端子,其中该第一电阻器还可以形成第三反馈路径的一部分。
34.第六电阻器可以具有连接到第五电阻器的第二端子的第六电阻器的第一端子以及连接到第二反馈晶体管的第二端子和第一反馈晶体管的控制端子的第六电阻器的第二端子。
35.第三反馈路径可以包括第七电阻器,该第七电阻器具有连接到第二反馈晶体管的控制端子的第七电阻器的第一端子、和连接到第一反馈晶体管的第一端子并且连接到第一反馈路径中的第一电阻器的第二端子的第七电阻器的第二端子,其中该第一电阻器还可以形成第三反馈路径的一部分。因此,第一反馈晶体管的第一端子(例如,发射极端子)处的电压经由该第七电阻器施加到第二反馈晶体管的控制端子(例如,基极端子)。
36.如先前所概述的,相对快速的启动速度可以利用本发明的振荡器电路来实现,因为,有源偏置电路本身能够被切换,由此将电流切换到振荡器晶体管的控制端子(例如,基极端子)。在一些实施例中,振荡器电路还包括具有相应的第一端子、第二端子以及控制端子的开关晶体管,所述开关晶体管布置成使得施加到所述开关晶体管的控制端子的控制信号使通过所述开关晶体管的第一端子和第二端子的电流变化,其中供应到振荡器晶体管的控制端子的电流取决于通过所述开关晶体管的第一端子和第二端子的电流。该开关晶体管可以形成有源偏置电路部分的一部分,或该开关晶体管可以在有源偏置电路部分外部。备选地,开关晶体管可以形成外部控制电路的一部分,例如微处理器。
37.开关晶体管可以包括任何合适的晶体管。然而,在实施例的集合中,开关晶体管包括npn bjt,其中其第一端子是集电极端子,其第二端子是发射极端子,并且其控制端子是基极端子。在备选实施例中,开关晶体管可以包括金属氧化物半导体场效应晶体管(mosfet)。
38.在这样的实施例的集合中,第八电阻器可以布置成使得第八电阻器的第一端子连接到开关晶体管的第一端子,并且第八电阻器的第二端子连接到第一反馈晶体管的控制端子。在提供第二反馈晶体管的情况下,第八电阻器的第二端子还可以连接到第二反馈晶体管的第二端子。开关晶体管的第二端子可以连接到地。
39.在一些实施例中,微带线(msl)可以用于对微波电路(即,环绕对所生成的微波振
荡信号的传播造成影响的振荡器晶体管的电路系统)的特性进行“调谐”。因此,虽然上文中所概述的到振荡器晶体管的第一端子和控制端子的“连接”(特别地,关于有源偏置电路的连接)可以是直接的,但至少在一些实施例中,这些连接可以经由一个或多个微带线连接到振荡器晶体管端子中的一个或多个。
40.首先,关于振荡器晶体管的控制端子,振荡器电路可以包括第一微带线、第二微带线以及第三微带线,所述第一微带线、第二微带线以及第三微带线布置成使得:第一微带线具有连接到振荡器晶体管的控制端子的第一微带线的第一端,并且第一微带线的第二端是开端的;第二微带线具有连接到第一微带线的第一端和振荡器晶体管的控制端子的第二微带线的第一端;以及第三微带线具有连接到第二微带线的第二端的第三微带线的第一端,并且第三微带线的第二端是开端的;其中第三微带线的第一端和第二微带线的第二端连接到有源偏置电路。
41.本领域技术人员将理解,由于第一微带线是开端的,因此第一微带线将晶体管驱动到不稳定的操作区域中并且对频率造成影响。一般而言,该第一微带线可以是四分之一波长(λg/4)长,其中波长(λg)是在衬底中由振荡器晶体管生成的感兴趣的微波信号的波长。第二微带线和第三微带线表现为针对感兴趣的微波信号的频率的带阻滤波器,并且还可以是四分之一波长(λg/4)长。
42.第一微带线、第二微带线以及第三微带线可以形成第二反馈路径的一部分。特别地,在实施例的特定集合中,在提供的情况下,第三微带线的第一端和第二微带线的第二端可以进一步连接到第三电阻器的第二端子并且连接到第四电阻器的第一端子。
43.附加地或备选地,多个微带线还可以连接到振荡器晶体管的第一端子。在实施例的特定集合中,振荡器电路包括第四微带线和第五微带线,所述第四微带线和第五微带线布置成使得:第四微带线具有连接到振荡器晶体管的第一端子的第四微带线的第一端;以及第五微带线具有连接到第四微带线的第二端的第五微带线的第一端,并且第五微带线的第二端是开端的。
44.第四微带线和第五微带线可以表现为针对感兴趣的微波信号的频率的带阻滤波器,并且还可以是四分之一波长(λg/4)长。
45.如上文中所概述的,振荡器生成振荡器晶体管的第一端子处的微波振荡信号,该信号被视为具有负电阻和任意电抗的复阻抗。这可以被认为是振荡器的输出,然而,另外的组件可以在振荡器晶体管的第一端子与振荡器的输出端子之间连接,以便将该晶体管的输出阻抗与振荡器的输出端子匹配,仅通过示例的方式,该输出阻抗可以是大约50欧姆。例如,在一些实施例中,匹配电路在振荡器晶体管的第一端子与振荡器电路的输出端子之间连接。在一些实施例中,匹配电路可以包括第六微带线和第七微带线以及带通滤波器。
46.在提供的情况下,第六微带线可以具有连接到第四微带线的第一端并且连接到振荡器晶体管的第一端子的第六微带线的第一端,并且第六微带线的第二端是开端的。带通滤波器可以在振荡器晶体管的第一端子与振荡器的输出端子之间连接。
47.在提供的情况下,第四微带线和第六微带线的相应的第一端可以连接到带通滤波
器的输入部。在一些实施例中,第七微带线可以被连接,使得其第一端连接到振荡器的输出端子并且连接到带通滤波器的输出部,其中所述第七微带线的第二端是开端的。
48.该匹配电路在振荡器晶体管的第一端子(例如,集电极端子)处使负载(即,输出)阻抗变换成合适的值,以提供共轭匹配。带通滤波器可以基本上使具有如由该带通滤波器确定的特定范围之外的频率(或等效地是波长)的信号衰减(即“滤除”),并且从微波振荡信号滤除高次谐波和dc分量两者。
49.虽然振荡器晶体管的第二端子与表面集成波导谐振器之间的连接可以是直接的,但在一些实施例中,第八微带线可以在这些之间连接。换而言之,第八微带线的第一端可以连接到振荡器晶体管的第二端子,并且第八微带线的第二端可以连接到表面集成波导谐振器。
50.如上文中所概述的,带通滤波器可以在振荡器晶体管的第一端子与振荡器电路的输出端子之间连接。虽然该滤波器可以是专用滤波电路,但在实施例的特定集合中,带通滤波器可以以微带线替换。该微带线具备期望的波阻抗和电长度,并且使阻抗变换,并且可能不表现出带通滤波特性。因此,在一些实施例中,第九微带线可以在振荡器晶体管的第一端子与振荡器电路的输出端子之间连接。因此,在一些实施例中,第四微带线和第六微带线的相应的第一端可以连接到第九微带线的第一端,其中所述第九微带线的第二端连接到振荡器的输出端子(并且可选地连接到第七微带线的第一端(在提供的情况下))。
附图说明
51.现在将参考附图来描述本公开的某些实施例,其中:图1是根据本发明的实施例的振荡器的电路图,其中单级反馈布置用于提供负集电极-基极并联反馈;图2是根据本发明的另外的实施例的振荡器的电路图,其中两级反馈布置用于提供负集电极-基极并联反馈;图3是根据本发明的另外的实施例的振荡器的电路图,其中带通滤波器以微带线替换;图4是示出对于不同的振荡器电路的相位噪声随频率而变的曲线图;图5是示出与不同的振荡器电路相关的各种参数的表;图6是示出微波脉冲的标绘图;图7是对于图2的振荡器电路的微波电路布局;以及图8是对于图3的振荡器电路的微波电路布局。
具体实施方式
52.图1是根据本发明的实施例的振荡器电路100的电路图,其中单级反馈布置用于提供负集电极-基极并联反馈。
53.振荡器电路100包括振荡器晶体管q1,在该特定实施例中,振荡器晶体管q1是npn bjt。该振荡器晶体管q1具有相应的集电极(第一)端子、发射极(第二)端子以及基极(控制)端子。振荡器晶体管q1布置成在其集电极端子处生成微波振荡信号,其中该微波振荡信号经受下文中所概述的进一步处理步骤而提供为输出。特别地,该输出信号是适合于供雷达
运动传感器使用的高频微波信号(例如大约10 ghz)。
54.振荡器电路100还包括:有源偏置电路102(其组件在下文中更详细地解释);表面集成波导(siw)谐振器y1;带通滤波器y2;以及许多微带线msl
1-8
。
55.siw谐振器y1连接到振荡器晶体管q1的发射极端子并且因此使发射极连接到地,其中msl8在振荡器晶体管q1的发射极端子与siw谐振器y1之间连接。
56.有源偏置电路部分102在振荡器晶体管q1的集电极端子与基极端子之间提供负反馈布置。如在下文中更详细地解释的,该负反馈布置布置成将偏置基极电流ib供应到振荡器晶体管q1的基极端子,其中基极电流ib取决于振荡器晶体管q1的集电极端子处的电压vc乘以负增益。换而言之,有源偏置电路部分102充当在振荡器晶体管q1的集电极端子与基极端子之间连接的负跨导放大器。
57.为了提供该负集电极-基极并联反馈,有源偏置电路部分102包括反馈晶体管q2,在该实施例中,该反馈晶体管q2是具有相应的发射极(第一)端子、集电极(第二)端子以及基极(控制)端子的pnp bjt。
58.该反馈晶体管q2布置成使得其发射极端子经由第一反馈路径连接到振荡器晶体管q1的集电极端子,该第一反馈路径由下者构成:一对电阻器r
c1
、r
c2
;一对电容器c
c1
、c
c2
;以及微带线msl4和msl5中的两个。
59.这些电阻器r
c1
中的第一个的第一端子连接到供应电压v
cc
,而该电阻器r
c1
的另一个端子连接到反馈晶体管q2的发射极端子,并且连接到电阻器r
c2
中的第二个的第一端子。第二电阻器r
c2
的另一个端子连接到振荡器晶体管q1的集电极端子。
60.电容器c
c1
之一在第一电阻器r
c1
的第一端子与地之间连接。另一个电容器c
c2
在第二电阻器r
c2
的第二端子与地之间连接。第一电容器c
c1
是去耦电容器。第二电容器c
c2
与电阻器r
c2
和r
b4
组合提供低通滤波器。
61.反馈晶体管q2的集电极端子经由第二反馈路径连接到振荡器晶体管q1的基极端子,该第二反馈路径由另外的一对电阻器r
b4
、r
b6
和微带线msl
1-3
中的三个构成。
62.这些电阻器r
b4
中的第一个布置成使得其端子之一连接到第一反馈晶体管q2的集电极端子。该电阻器r
b4
的另一个端子连接到另一个电阻器r
b6
的第一端子并且连接到振荡器晶体管q1的基极端子。因此,该第二反馈路径将从q1的集电极端子回到q1的基极端子的“环路闭合”。第二反馈路径中的第二电阻器r
b6
的另一个端子连接到地。
63.包括电容器c
c2
以及电阻器r
c2
和r
b4
的低通滤波器导致振荡器晶体管q2的集电极端子处的信号在被施加到振荡器晶体管q1的控制端子之前跨过闭合反馈环路经受滤波。
64.因此,上文中所概述的反馈晶体管q2和反馈路径电路系统给振荡器晶体管q1提供负集电极-基极并联反馈。这有助于使振荡器晶体管q1的dc电压和电流变化稳定、使振荡器的参数的退化最小化、以及减少相位噪声。
65.振荡器电路还包括具有相应的集电极端子、发射极端子以及基极端子的开关晶体管q4——在此情况下是npn bjt。如在下文中更详细地概述的,该开关晶体管q4布置成在其基极端子处接收控制信号v
ctr
——即,控制电压。
66.开关晶体管q4布置成使得开关晶体管q4经由一对电阻器r
b1
、r
b2
连接到振荡器电路100的剩余部分。这些电阻器r
b1
中的第一个被连接,使得电阻器r
b1
的一个端子连接到供应电压v
cc
——特定地在其中第一反馈路径的第一电阻器r
c1
和第一电容器c
c1
连接到供应电压vcc
的节点处。电阻器r
b1
的另一个端子连接到反馈晶体管q2的基极端子并且连接到另一个电阻器r
b2
的端子之一,其另一端连接到开关晶体管q4的集电极端子。开关晶体管q4的发射极端子连接到地。
67.使控制信号v
ctr
变化使通过开关晶体管q4的集电极-发射极电流变化。由于其连接到反馈晶体管q2,因此抑制通过开关晶体管q4的集电极-发射极电流也抑制通过反馈晶体管q2的集电极-发射极电流。由于供应到振荡器晶体管q1的基极端子的基极电流ib取决于通过反馈晶体管q2的反馈环路,因此抑制通过q2的集电极-发射极电流也抑制基极电流ib。
68.因此,供应到振荡器晶体管q1的基极端子的基极电流ib最终取决于通过开关晶体管q4的电流。因此,开关晶体管q4提供简单方式来切换整个振荡器电路100。这提供相对快速的启动,因为,有源偏置电路102本身能够被切换,由此将电流切换到振荡器晶体管q1的基极端子。如先前所概述的,具有快速启动时间使得本发明的布置特别非常适合于高频脉冲操作。
69.虽然开关晶体管q4可以是如图1中所示出的有源偏置电路部分102的一部分,但将理解,开关晶体管q4可能不一定是独立组件,并且可以例如形成外部控制电路的一部分,例如微处理器(未示出)。
70.msl
1-8
可以用于对微波电路的特性进行“调谐”,即,环绕振荡器晶体管q1的电路系统。这些msl
1-8
共同起作用来设定微波电路的谐振频率并且滤除不想要的频率。
71.第一msl1在一端处连接到振荡器晶体管q1的基极端子,而其另一端是开端的(即,未被连接)。第二msl2具有连接到msl1的第一端和振荡器晶体管q1的基极端子的一端。第三msl3被连接,使得一端连接到msl2的第二端(即,连接到不连接到msl1的端部),而msl3的另一端是开端的。使msl3的第一端和msl2的第二端连接的节点进一步连接到有源偏置电路102,并且特定地连接到使r
b4
和r
b6
连接的节点。因此,msl
1-3
能够被视为形成第二反馈路径的一部分,即,msl
1-3
就位于反馈晶体管q2的集电极端子与振荡器晶体管q1的基极端子之间。
72.由于msl1是开端的,因此其尺寸显著地影响微波频率。一般而言,msl1可以是四分之一波长(λg/4)长,其中波长(λg)是感兴趣的微波信号(即,由振荡器晶体管q1在衬底中生成的信号)的波长。还将理解,msl2和msl3提供带阻滤波器传递函数,从而起作用来使微波频率分量隔离,进而防止它们流过偏置电路。
73.msl4和msl5类似地形成第一反馈路径的一部分。特定地,msl4在一端处连接到振荡器晶体管q1的集电极端子,并且在另一端处连接到msl5的第一端。msl5的另一端是开端的。
74.如上文中所概述的,振荡器电路100生成振荡器晶体管q1的集电极端子处的微波振荡信号。包括msl
6-7
和带通滤波器y2的输出匹配电路在振荡器晶体管q1的集电极与振荡器电路100的输出端子之间连接。带通滤波器y2在振荡器晶体管q1的集电极与振荡器电路100的输出端子之间连接,并且起作用来使具有特定“通带”范围之外频率的信号衰减。如能够在图1中看出的,msl4和msl6在其处被连接的节点进一步连接到带通滤波器y2的输入部。msl6具有连接到msl4的第一端(即,不连接到msl5的msl4的端部)并且连接到振荡器晶体管q1的集电极端子的一端。msl6的另一端是开端的。msl7被连接,使得msl7的一端连接到振荡器电路100的输出端子并且连接到带通滤波器y2的输出部,并且msl7的另一端是开端的。
75.包括msl
6-7
和带通滤波器y2的输出匹配电路使负载(输出)阻抗变换成适合于振荡器晶体管q1的集电极端子的值,以提供共轭匹配。带通滤波器y2从由q1生成的微波振荡信号
滤除高次谐波和dc分量两者。
76.振荡器晶体管q1的发射极与siw y1之间的连接能够是直接的,然而在该特定实施例中,msl8在这些之间连接。msl8使siw谐振器y1的输入阻抗变换成q1发射极处的一定值,以便在感兴趣的频率下在q1集电极处获得负电阻。
77.根据leeson方程,振荡器的相位噪声的功率谱密度可以被描述为(d. b. leeson的“反馈振荡器噪声谱的简单模型”,ieee学报,第54卷,第2期,第329-330页,1966年2月):其中α-由有源装置的1/f变化(闪变噪声)的幅度确定的常数;-振荡器中的谐振器的负载质量因子;-载波偏移角频率,rad/sec;-载波角频率,rad/sec;-振荡器有源元件处的信号电平,w;-振荡器晶体管的噪声因子;-boltzman常数;以及-温度,k。
78.从上文的方程得出的是,对振荡器的相位噪声的主要贡献者是谐振器的负载质量因子和有源装置的闪变噪声。
79.bjt中的1/f闪变噪声可以由表达为下式的电流噪声谱密度来表示(j. l. plumb和e. r. chenette“晶体管中的闪变噪声”,ieee电子装置学报,第ed-10卷,第304-308页,1963年9月):其中-基极电流,a;-取决于晶体管的技术的常数;-通常从1至2的常数;以及-偏移频率,(hz)。
80.因此,给振荡器电路提供有高q谐振器和反馈技术是高度地重要的,这减少闪变噪声(1/f噪声)并且使dc电流稳定,以便实现优良相位噪声信号性能。
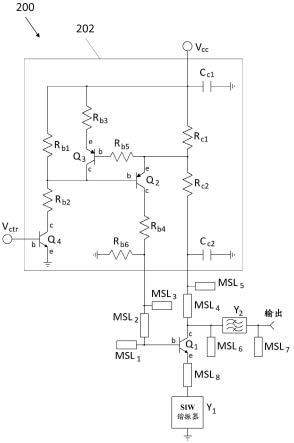
81.图2是根据本发明的另外的实施例的振荡器电路200的电路图,其中两级反馈布置用于提供负集电极-基极并联反馈。在图7中示出用于振荡器电路200的合适的微波电路布局的示例。
82.图2的振荡器电路200在结构和功能上与图1的振荡器电路100类似。照此,为了便于参考,除非上下文另外规定,否则具有以“2”开头所附的参考标号的组件在结构和功能上与先前参考图1来描述的、具有以“1”开头的相同参考标号的那些组件相似。因此,除非另外指定,否则图2中具有参考标号“2xx”的组件应当被假定为在形式和功能上与图1中具有参考标号“1xx”的组件相似。
83.图2的振荡器电路200提供负反馈布置中的进一步的改进。除了图1的振荡器电路100的组件之外,图2的振荡器电路200还包括第二反馈晶体管q3,在该实施例中,该第二反
馈晶体管q3是具有相应的发射极(第一)端子、集电极(第二)端子以及基极(控制)端子的pnp bjt。
84.第二反馈晶体管q3的发射极端子经由电阻器r
b3
连接到供应电压。如在下文中更详细地概述的,第二反馈晶体管q3的集电极端子连接到第一反馈晶体管q2的基极端子,并且第二反馈晶体管q3的基极端子经由第三反馈路径连接到第一反馈晶体管q2的发射极端子。
85.该第二反馈晶体管q3有利地增大负反馈,以实现振荡器晶体管q1的更高的dc稳定性并且进一步减少相位噪声。此外,第二反馈晶体管q3提供对振荡器晶体管q1的温度稳定性的显著改进。
86.第三反馈路径包括额外的电阻器r
b5
,该额外的电阻器r
b5
在使第一反馈路径中的r
c1
和r
c2
连接的节点处在第二反馈晶体管q3的基极端子与第一反馈晶体管q2的发射极端子之间连接。因此,第一反馈晶体管q2的发射极端子处的电压经由r
b5
施加到第二反馈晶体管q3的基极端子。
87.先前描述的r
b1
现在连接到r
b3
与第二反馈晶体管q3的集电极端子和第一反馈晶体管q2的控制端子在其处被连接的节点之间。
88.另外的电阻器r
b3
在使第一反馈路径中的r
c1
和c
c1
连接的节点处在第二反馈晶体管q3的发射极端子与供应电压v
cc
之间连接。因此,第一反馈晶体管q2的发射极端子处的电压经由r
b5
施加到第二反馈晶体管q3的基极端子。
89.因此,由于该布置的原因,第二反馈晶体管q3驱动第一反馈晶体管q2的基极电流,并且第一反馈晶体管q2驱动振荡器晶体管q1的基极电流ib,并且因此控制振荡器晶体管q1的集电极电流ic。
90.图3是根据本发明的另外的实施例的振荡器的电路图,其中带通滤波器y2以额外的微带线msl9替换。在图8中示出用于振荡器电路300的合适的微波电路布局的示例。
91.图3的振荡器电路300在结构和功能上与图1和图2的振荡器电路100、200类似。照此,为了便于参考,除非上下文另外规定,否则具有以“3”开头所附的参考标号的组件在结构和功能上与先前参考图1来描述的、具有以“1”开头的相同参考标号的那些组件和/或具有先前参考图2来描述的以“2”开头的相同参考标号的那些组件相似。因此,除非另外指定,否则图3中的具有参考标号“3xx”的组件应当被假定为在形式和功能上与具有图1中的参考标号“1xx”和/或图2中的参考标号“2xx”的组件相似。
92.如上文中所概述的,在该特定实施例中,在图1和图2的振荡器电路100、200中使用的带通滤波器y2分别以额外的微带线msl9替换。该msl9被设定尺寸使得该msl9具备期望的波阻抗和电长度,并且使所连接的点msl7处的阻抗变换成振荡器晶体管q1的集电极端子处的必要的值,以便匹配振荡器晶体管q1的集电极和振荡器输出的输出阻抗。
93.图4是示出对于不同的振荡器电路的相位噪声谱密度随频率而变的曲线图。特定地,图4提供示出为标绘图a)的具有“无源”偏置控制的常规振荡器电路(未示出)、示出为标绘图b)的图1的具有“单级有源偏置控制”的振荡器电路100、以及示出为标绘图c)的图2的具有“两级有源偏置控制”的振荡器电路200的性能的比较。能够在图5的表中看出这些电路的性能的进一步的比较。
94.如能够从标绘图看出的,图1的“单级”振荡器电路100提供优于现有技术的示例的改进。特定地,能够从标绘图a)与标绘图b)的比较看出,通过实现图1的振荡器电路100来在
相位噪声的方面实现大约7db的改进。因此,这提供比可利用现有技术的电路来实现的情况更低的相位噪声和更快的切换。
95.图2的“两级”振荡器电路200提供在相位噪声中的更进一步的改进。通过将标绘图c)与标绘图a)和标绘图b)比较,能够看出,图2的振荡器电路200提供与图1的单级振荡器电路100相比的在相位噪声中的进一步的3 db减小和与现有技术的无源电路比较的总体上的10 db减小。
96.如能够从图5的表看出,图1的振荡器电路100提供在对于供应电压v
cc
中给定的下降的dc电流下降和微波功率下降的方面优于现有技术的无源电路的改进,所述供应电压v
cc
中给定的下降可以对应于如先前所概述的电池电压随时间的下降。
97.图5的表中所示出的数据还表明图2的振荡器电路200在相同的供应电压降下甚至更稳定,从而提供了比现有技术的示例的dc电流和微波输出功率减小二分之一的dc电流和微波输出功率。
98.因此,将理解,图4表明图1的振荡器电路100和图2的振荡器电路200两者表现得比本身在本领域中已知的常规振荡器电路更好。虽然未在图5和图6中示出,但图3的振荡器电路300将表现出与图2的电路200类似的性能。
99.图6是示出微波脉冲的标绘图。特别地,图6示出5.5 ns微波脉冲。图2的有源偏置电路200的开启/关闭输入处(即,q4的基极端子处)的控制脉冲是10 ns。因此,接通/切断时间是大约2.3 ns。该更快的切换使得本发明的振荡器电路特别非常适合于脉冲操作。
100.因此,将理解,本公开的方面提供与现有的“无源”偏置电路相比表现出在相位噪声、输出功率以及稳定性的方面的改进的用于振荡器的改进的偏置电路以及包括这样的偏置电路和高质量谐振器的改进的振荡器电路。
101.虽然已详细地描述本公开的特定示例,但本领域技术人员将理解,详细地描述的示例并非限制于本公开的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1