控制无人驾驶车辆内部灯饰的方法、装置、设备和介质与流程
1.本公开涉及计算机领域,具体涉及智能交通技术领域和无人驾驶技术领域,尤其涉及一种控制无人驾驶车辆内部灯饰的方法、装置、设备和介质。
背景技术:
2.目前,相关技术中大多数以屏幕内的提示或车内语音播报形式,提示乘客快要到站准备下车。
技术实现要素:
3.本公开实施例提出了一种控制无人驾驶车辆内部灯饰的方法、装置、设备和介质。
4.第一方面,本公开实施例提出了一种控制无人驾驶车辆内部灯饰的方法,包括:获取无人驾驶车辆的行驶路径信息,无人驾驶车辆的运行参数信息和交通环境信息;根据车辆的运行参数信息和交通环境信息,确定无人驾驶车辆到达行驶路径信息中的目标位置对应的到达时间;根据到达时间,确定无人驾驶车辆的内部灯饰的显示效果,其中,显示效果用于提示到达目标位置。
5.第二方面,本公开实施例提出了一种控制无人驾驶车辆内部灯饰的装置,包括:信息获取模块,被配置成获取无人驾驶车辆的行驶路径信息,无人驾驶车辆的运行参数信息和交通环境信息;时间确定模块,被配置成根据车辆的运行参数信息和交通环境信息,确定无人驾驶车辆到达行驶路径信息中的目标位置对应的到达时间;效果确定模块,被配置成根据到达时间,确定无人驾驶车辆的内部灯饰的显示效果,其中,显示效果用于提示到达目标位置。
6.第三方面,本公开实施例提出了一种电子设备,包括:至少一个处理器;以及与至少一个处理器通信连接的存储器;其中,存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器能够执行如第一方面描述的方法。
7.第四方面,本公开实施例提出了一种存储有计算机指令的非瞬时计算机可读存储介质,计算机指令用于使计算机执行如第一方面描述的方法。
8.第五方面,本公开实施例提出了一种计算机程序产品,包括计算机程序,计算机程序在被处理器执行时实现如第一方面描述的方法。
9.第六方面,本公开实施例提出了一种无人驾驶车辆,包括第三方面描述的电子设备。
10.本公开实施例提供的控制无人驾驶车辆内部灯饰的方法、装置、设备和介质,根据车辆的运行参数信息和交通环境信息,确定无人驾驶车辆到达行驶路径信息中的目标位置对应的到达时间;之后,在满足到达时间时,确定无人驾驶车辆的内部灯饰的显示效果,其中,显示效果用于提示到达目标位置,能够在全无人自动驾驶车辆的座舱内,通过灯饰的显示效果提示乘客到达目标位置,增加了车内空间交互媒介与车外道路以及目标位置之间距离的多重互动,从而提高了乘客的乘车体验。
11.应当理解,本部分所描述的内容并非旨在标识本公开实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
附图说明
12.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本公开的其它特征、目的和优点将会变得更明显。附图用于更好地理解本方案,不构成对本公开的限定。其中:
13.图1是本公开可以应用于其中的示例性系统架构图;
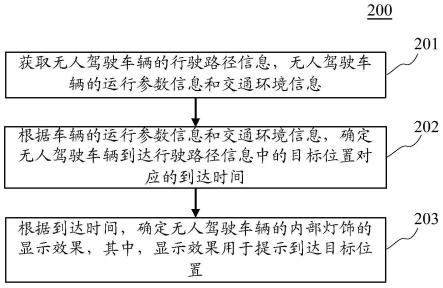
14.图2是根据本公开的控制无人驾驶车辆内部灯饰的方法的一个实施例的流程图;
15.图3是迎宾场景对应的显示效果;
16.图4(a)~图4(d)是距离目标目的地800对应的显示效果;
17.图5(a)~图5(d)是距离目标目的地500对应的显示效果;
18.图6(a)~图6(d)是距离目标目的地100对应的显示效果;
19.图7(a)~图7(d)是到达目标目的地对应的显示效果;
20.图8是根据本公开的控制无人驾驶车辆内部灯饰的装置的一个实施例的示意图;
21.图9是用来实现本公开实施例的电子设备的框图。
具体实施方式
22.以下结合附图对本公开的示范性实施例做出说明,其中包括本公开实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本公开的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
23.需要说明的是,在不冲突的情况下,本公开中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本公开。
24.图1示出了可以应用本公开的控制无人驾驶车辆内部灯饰的方法和装置的实施例的示例性系统架构100。
25.如图1所示,系统架构100可以包括无人驾驶车辆对应的车载终端101,网络102和服务器103,在图1中以一个无人驾驶车辆对应的车载终端为示例。网络102用以在无人驾驶车辆对应的车载终端101和服务器103之间提供通信链路的介质。网络102可以包括各种连接类型,例如有线、无线通信链路或者光纤电缆等等。
26.无人驾驶车辆对应的车载终端101可以是硬件,也可以是软件。当无人驾驶车辆对应的车载终端101为硬件时,可以实现成多个服务器组成的分布式服务器集群,也可以实现成单个服务器。当无人驾驶车辆对应的车载终端101为软件时,可以实现成多个软件或软件模块(例如用来提供分布式服务),也可以实现成单个软件或软件模块。在此不做具体限定。
27.服务器103可以提供各种服务。例如,服务器103可以获取无人驾驶车辆的行驶路径信息,无人驾驶车辆的运行参数信息和交通环境信息;根据车辆的运行参数信息和交通环境信息,确定无人驾驶车辆到达行驶路径信息中的目标位置对应的到达时间;根据到达时间,确定无人驾驶车辆的内部灯饰的显示效果,其中,显示效果用于提示到达目标位置。
28.需要说明的是,服务器103可以是硬件,也可以是软件。当服务器103为硬件时,可
以实现成多个服务器组成的分布式服务器集群,也可以实现成单个服务器。当服务器103为软件时,可以实现成多个软件或软件模块(例如用来提供分布式服务),也可以实现成单个软件或软件模块。在此不做具体限定。
29.需要说明的是,本公开实施例所提供的控制无人驾驶车辆内部灯饰的方法一般由服务器103执行,相应地,控制无人驾驶车辆内部灯饰的装置一般设置于服务器103中。
30.应该理解,图1中的服务器、无人驾驶车辆对应的车载终端和网络的数目仅仅是示意性的。根据实现需要,可以具有任意数目的服务器、无人驾驶车辆对应的车载终端和网络。
31.继续参考图2,其示出了根据本公开的控制无人驾驶车辆内部灯饰的方法的一个实施例的流程200。该控制无人驾驶车辆内部灯饰的方法可以包括以下步骤:
32.步骤201,获取无人驾驶车辆的行驶路径信息,无人驾驶车辆的运行参数信息和交通环境信息。
33.在本实施例中,控制无人驾驶车辆内部灯饰的方法的执行主体(例如图1所示的服务器103)可以通过网络(例如图1所示网络102)获取无人驾驶车辆对应的车载终端(例如无人驾驶车辆对应的车载终端101)上的无人驾驶车辆的行驶路径信息,无人驾驶车辆的运行参数信息和交通环境信息;或,控制无人驾驶车辆内部灯饰的方法的执行主体(例如图1所示的无人驾驶车辆对应的车载终端101)可以通过传感器获取无人驾驶车辆的行驶路径信息,无人驾驶车辆的运行参数信息和交通环境信息。上述行驶路径信息可以为无人驾驶车辆预先设定的待行驶的路径,或预先由用户设定的待行驶的路径。上述运行参数信息可以为无人驾驶车辆在行驶路径信息上行驶过程中与运行参数相关的信息,例如,运行速度、运行加速度等。上述交通环境信息可以为无人驾驶车辆在行驶路径信息行驶过程中其他交通参与者涉及的信息。可选的,交通环境信息的类型可以根据实际需要确定,比如可以借助摄像头、全球定位系统、惯性测量单元、毫米波雷达、激光雷达等车载传感器装置,获取行车环境状态,如天气数据、交通信号灯、交通拓扑信息,全无人自动驾驶车辆、其他交通参与者的位置、运行状态等信息,摄像头获取的直接原始图像数据等原始交通环境信息来直接作为交通环境信息,还可以通过refinenet等模型对原始交通环境信息处理得到的深度图和语义分割图作为交通环境信息等。
34.本公开的技术方案中,所涉及的行驶路径信息、运行参数信息和交通环境信息的收集、存储、使用、加工、传输、提供和公开等处理,均符合相关法律法规的规定,且不违背公序良俗。
35.在一个示例中,获取无人驾驶车辆的行驶路径信息,可以包括:提供路径输入页面,路径输入页面上显示有起始位置输入框及目的位置输入框;在目的位置输入框处于输入状态下,根据在目的位置输入框中检测到的操作,获取行驶路径。
36.步骤202,根据车辆的运行参数信息和交通环境信息,确定无人驾驶车辆到达行驶路径信息中的目标位置对应的到达时间。
37.在本实施例中,上述执行主体可以根据车辆的运行参数信息和交通环境信息,确定无人驾驶车辆到达行驶路径信息中的目标位置对应的到达时间。上述到达时间可以为交通环境信息和运行参数信息,确定无人驾驶车辆可能到行驶路径中的目标位置对应的时间。上述目标位置可以为行驶路径中的任意位置,例如,起点、终点等。
38.步骤203,根据到达时间,确定无人驾驶车辆的内部灯饰的显示效果,其中,显示效果用于提示到达目标位置。
39.在本实施例中,上述执行主体可以根据到达时间,确定与到达时间对应的、无人驾驶车辆的内部灯饰的显示效果,该显示效果用于提示到达目标位置,以提醒到达目标位置。上述内部灯饰的显示效果可以为设置在无人驾驶车辆内部的灯饰的显示数量和/或灯饰的工作参数,该工作参数可以为与工作相关的参数,例如,工作频率、工作时长等。上述显示可以效果可以为灯饰连续显示或间隔显示。
40.需要说明的是,如果上述执行主体为服务器(例如图1所示的服务器103)可以通过网络(例如图1所示网络102)控制无人驾驶车辆对应的车载终端(例如无人驾驶车辆对应的车载终端101)中灯饰呈现该显示效果;或,如果上述执行主体为无人驾驶车辆对应的车载终端(例如无人驾驶车辆对应的车载终端101),则控制器内部的灯饰呈现该显示效果。
41.在一个示例中,根据到达时间,确定无人驾驶车辆的内部灯饰的显示效果,可以包括:响应于乘客在无人驾驶车辆的触控屏上针对位置图标的选择,将所选位置图标对应位置确定为目标位置;监控车辆的当前行程是否到达目标位置;当监控无人驾驶车辆到达目标位置时,确定与目标位置对应的显示效果。
42.本公开实施例提供的控制无人驾驶车辆内部灯饰的方法,根据车辆的运行参数信息和交通环境信息,确定无人驾驶车辆到达行驶路径信息中的目标位置对应的到达时间;之后,在满足到达时间时,确定无人驾驶车辆的内部灯饰的显示效果,其中,显示效果用于提示到达目标位置,能够在全无人自动驾驶车辆的座舱内,通过灯饰的显示效果提示乘客到达目标位置,增加了车内空间交互媒介与车外道路以及目标位置之间距离的多重互动,从而提高了乘客的乘车体验。
43.在本实施例的一些可选的实现方式中,根据车辆的运行参数信息和交通环境信息,确定无人驾驶车辆到达行驶路径信息中的目标位置对应的到达时间,包括:根据行驶路径信息中的目标位置的位置信息和无人驾驶车辆当前的位置信息,确定无人驾驶车辆距离目标位置的距离信息;根据距离信息,运行参数信息和与交通环境信息对应的交通影响程度,确定无人驾驶车辆到达目标位置对应的到达时间,其中,交通影响程度为其他交通参与者的行为对无人驾驶车辆的交通影响程度。
44.在本实现方式中,上述执行主体可以根据行驶路径信息中的目标位置的位置信息和无人驾驶车辆当前的位置信息,确定无人驾驶车辆距离目标位置的距离信息;根据距离信息,运行参数信息和与交通环境信息对应的交通影响程度,确定无人驾驶车辆到达目标位置对应的到达时间。
45.在一个示例中,上述执行主体可以根据交通影响程度调整无人驾驶车辆的运行参数信息,例如,通过该交通影响程度对应的影响系数调整无人驾驶车辆的运行参数信息,从而可以确定无人驾驶车辆在当前交通环境下到达目标位置对应的到达时间。
46.对应地,在该示例中,可以通过当前路口饱和度,确定该影响系数,例如,预先设置路口饱和度与影响系数的对应关系,其中,该当前路口饱和度可以通过当前路口的交通量和通行能力所确定。
47.需要说明的是,根据路口当前的交通量大小,可以计算当前路口饱和度状况,以反映交通量对无人驾驶车辆的通行安全性的影响。随着饱和度的增加,其他交通参与者的数
量也增加,因此产生的冲突通行增加,需降低无人驾驶车辆的运行参数信息,以达到降低事故发生率的目的。
48.在本实施例的一些可选的实现方式中,该方法还包括:根据交通环境信息,确定无人驾驶车辆所处的场景信息;根据到达时间,确定无人驾驶车辆的内部灯饰的显示效果,包括:根据到达时间和场景信息,确定对应的无人驾驶车辆的内部灯饰的显示效果。
49.在本实现方式中,上述执行主体可以根据到达时间和场景信息,确定无人驾驶车辆的内部灯饰的显示效果。
50.在一个示例中,根据交通环境信息,确定无人驾驶车辆所处的场景信息,可以包括:可以对交通环境信息进行识别,确定无人驾驶车辆所处的场景信息。例如,通过场景识别模型或图像识别技术或视频识别技术等对交通环境信息进行识别,以确定无人驾驶车辆的内部灯饰的显示效果。上述场景信息可以用于表征无人驾驶车辆所处的场景,例如,迎宾场景信息、启程场景信息等。
51.在本实施例的一些可选的实现方式中,场景信息包括:迎宾场景信息;以及根据到达时间和场景信息,确定无人驾驶车辆的内部灯饰的显示效果,包括:根据到达时间和迎宾场景信息,生成与迎宾场景信息对应的迎宾控制指令;根据迎宾控制指令,确定无人驾驶车辆内灯饰的显示效果。
52.在本实现方式中,上述执行主体根据到达时间和迎宾场景信息,生成与迎宾场景信息对应的迎宾控制指令;之后,根据迎宾控制指令,确定无人驾驶车辆内灯饰的显示效果。上述迎宾场景信息可以为无人驾驶车辆在迎宾上车或迎宾下车所涉及到的信息。所述迎宾控制指令用于控制车内灯饰显示对应的效果。
53.在一个示例中,可以预先建立迎宾控制指令与显示效果之间的对应关系,在生成迎宾控制指令之后,确定与之对应的显示效果,以提示进行迎宾。
54.在一个示例中,基于车内内饰交互点设计布置的环状或阶段性环装区域,给予用户基于自然用户界面的全新体验,产品设计整车空间包括0、1-l和1-r、2-l、2-r的五个交互位置点承载的交互纬度,定义出五个交互区间基于车内空间与时间的连续性表现,去适应迎宾与启程阶段的承载。
55.对应地,在该示例中,迎宾场景对应的显示效果可以为:(1)释放光:触发从0点的3倍长度白光线段连续打出1倍叠加并从2-l;2-r末端进行填满;持续叠加,形成多条线段状态积累,速度由慢加快。(2)在图3中,回收光:彩色光段从2-l,2-r底端跑向1-l,1-r方向;并且擦出滞留常亮呼吸效果的一种差异化颜色光。
56.在本实现方式中,在迎宾场景时,通过以上灯饰的显示效果可以配合车内空间交互媒介进行更加直观具有确定性的沟通与交互,此设计更加智能的车辆,将乘客以及场景结合到一起,向乘客传递更加自然的交互界面产品设计,体现出无人化科技设计的全新价值主张。
57.在本实施例的一些可选的实现方式中,根据到达时间和迎宾场景信息,生成与迎宾场景信息对应的迎宾控制指令,包括:对迎宾场景信息进行识别,确定迎宾场景信息中的目标对象与无人驾驶车辆之间的对应关系;响应于对应关系为预设关系,根据到达时间,生成迎宾控制指令。
58.在本实现方式中,上述执行主体可以对迎宾场景进行识别,以确定迎宾场景信息
中的目标对象与无人驾驶车辆之间的对应关系;且在满足对应关系为预设关系时,根据到达时间生成迎宾控制指令。上述迎宾场景信息的类型可以为图像或视频。上述目标对象可以为迎宾场景信息中所涉及到任意对象,例如,人物、宠物等。
59.在一个示例中,目标对象与无人驾驶车辆之间的对应关系可以为预先存储的,例如预先建立目标对象与无人驾驶车辆的id之间的对应关系。上述对应关系可以为亲戚、朋友、陌生人等关系。
60.在本实施例的一些可选的实现方式中,场景信息包括启程场景信息;该方法还包括:根据启程场景信息,生成与启程场景信息对应的启程控制指令;确定与启程控制指令对应的显示效果。
61.在本实现方式中,上述执行主体还可以根据启程场景信息时,生成与启程场景信息对应的启程控制指令;之后,确定与启程控制指令对应的显示效果。上述启程场景信息可以为无人驾驶车辆启程时所涉及到的信息。所述启程控制指令用于控制车内灯饰显示对应的效果。
62.在一个示例中,可以预先建立启程控制指令与显示效果之间的对应关系,在生成启程控制指令之后,确定与之对应的显示效果,以提示无人驾驶车辆启程。
63.在本实现方式中,在启程场景时,通过以上灯饰的显示效果可以配合车内空间交互媒介进行更加直观具有确定性的沟通与交互,此设计更加智能的车辆,将乘客以及场景结合到一起,向乘客传递更加自然的交互界面产品设计,体现出无人化科技设计的全新价值主张。
64.在本实施例的一些可选的实现方式中,目标位置为距离行驶路径信息的目标目的地预设距离的位置。
65.在一个示例中,上述目标位置可以为行驶路径中距离目标目的地预设距离的位置,例如,距离目标目的地800米的位置、距离目标目的地500米的位置、距离目标目的地100米的位置。上述目标目的地可以为任意乘客预想到达的位置,例如a学校北门,b公司等。
66.在本实施例的一些可选的实现方式中,预设距离包括多个不同的距离。
67.在本实现方式中,上述预设距离可以为多个不同的距离,例如,800米、500米、100米等。
68.在一个示例中,灯饰可以根据不同的距离呈现不同的显示效果。
69.在图4(a)~图4(d)中,距离目标目的地d3=800米时,灯饰的显示效果可以为:灯光开始从交互灯带的中心0位置同时向两边扩散打出涟漪切线状态光波,到0-l,和0-r;光波扩散在0的交互位置点速度均为v1。并且v1的灯语扩散速度随到达目标目的地的距离缩减而做递减。
70.在图5(a)~图5(d)中,距离目标目的地d2=500米时,灯饰的显示效果可以为:灯光开始从交互灯带的中心0、1-r、1-l位置同时向两边扩散打出涟漪切线状态光波,光波扩散在0、1-l和1-r的三个交互位置点,且涟漪波灯语速度均为v2。与此同时v2的扩散速度随到达目标目的地的距离缩减而做递减。v2永远小于v1的临界速度。
71.在图6(a)~图6(d)中,距离目标目的地d1=100米时,灯饰的显示效果可以为:开始从交互灯带的中心0、1-l、1-r、2-l、2-r位置同时向两边扩散打出涟漪切线状态光波,光波扩散在0、1-l和1-r、2-l、2-r的五个交互位置点,且涟漪波灯语速度均为v3。与此同时v3
的扩散速度随到达目标目的地的距离缩减而做递减。整体灯语视觉感受明显变慢。v3永远小于v2的临界速度。
72.在图7(a)~图7(d)中,到达目标目的地时,灯饰的显示效果可以为:灯扩散停止打出光束,中心光源明暗呼吸后消失。
73.在本实现方式中,基于车内灯饰交互点设计布置的环状或阶段性环装区域,给予用户基于自然用户界面的全新体验,产品设计了2+n层灯语交互纬度,定义出距离终点的2+n种不同的交互区间,去适应不同的路段、旅程的服务。其中,n大于等于0。
74.在一个示例中,将车内灯饰设置不同的区域,该显示效果可以对应不同区域的工作参数。例如,d0距离目标目的地为0米时;假设d1距离目标目的地为500米;d2距离目标目的地为800米。
75.在本实施例的一些可选的实现方式中,显示效果包括:无人驾驶车辆内环绕的灯饰对应的数量和/或灯饰对应的工作参数。
76.在本实现方式中,内部灯饰的显示效果可以为设置在无人驾驶车辆内部的灯饰的显示数量和/或灯饰的工作参数,该工作参数可以为与工作相关的参数,例如,工作频率、工作时长等。
77.进一步参考图8,作为对上述各图所示方法的实现,本公开提供了一种控制无人驾驶车辆内部灯饰的装置的一个实施例,该装置实施例与图2所示的方法实施例相对应,该装置具体可以应用于各种电子设备中。
78.如图8所示,本实施例的控制无人驾驶车辆内部灯饰的装置800可以包括:信息获取模块801、时间确定模块802和效果确定模块803。其中,信息获取模块801,被配置成获取无人驾驶车辆的行驶路径信息,无人驾驶车辆的运行参数信息和交通环境信息;时间确定模块802,被配置成根据车辆的运行参数信息和交通环境信息,确定无人驾驶车辆到达行驶路径信息中的目标位置对应的到达时间;效果确定模块803,被配置成根据到达时间,确定无人驾驶车辆的内部灯饰的显示效果,其中,显示效果用于提示到达目标位置。
79.在本实施例中,控制无人驾驶车辆内部灯饰的装置800中:信息获取模块801、时间确定模块802和效果确定模块803的具体处理及其所带来的技术效果可分别参考图2对应实施例中的步骤201-203的相关说明,在此不再赘述。
80.在本实施例的一些可选的实现方式中,时间确定模块802,进一步被配置成:根据行驶路径信息中的目标位置的位置信息和无人驾驶车辆当前的位置信息,确定无人驾驶车辆距离目标位置的距离信息;根据距离信息,运行参数信息和与交通环境信息对应的交通影响程度,确定无人驾驶车辆到达目标位置对应的到达时间,其中,交通影响程度为其他交通参与者的行为对无人驾驶车辆的交通影响程度。
81.在本实施例的一些可选的实现方式中,该装置还包括:场景确定模块,被配置成根据交通环境信息,确定无人驾驶车辆所处的场景信息;效果确定模块803,进一步被配置成:根据到达时间和场景信息,确定无人驾驶车辆的内部灯饰的显示效果。
82.在本实施例的一些可选的实现方式中,场景信息包括迎宾场景信息;效果确定模块803,包括:指令生成单元,被配置成根据到达时间和迎宾场景信息,生成与迎宾场景信息对应的迎宾控制指令;效果生成单元,被配置成根据迎宾控制指令,确定无人驾驶车辆内灯饰的显示效果。
83.在本实施例的一些可选的实现方式中,指令生成单元,进一步被配置成:对迎宾场景信息进行识别,确定迎宾场景信息中的目标对象与无人驾驶车辆之间的对应关系;响应于对应关系为预设关系,根据到达时间,生成迎宾控制指令。
84.在本实施例的一些可选的实现方式中,场景信息包括启程场景信息;效果生成模块,进一步被配置成:根据启程场景信息,生成与启程场景信息对应的启程控制指令;确定与启程控制指令对应的显示效果。
85.在本实施例的一些可选的实现方式中,目标位置为距离行驶路径信息的目标目的地预设距离的位置。
86.在本实施例的一些可选的实现方式中,预设距离包括多个不同的距离。
87.在本实施例的一些可选的实现方式中,显示效果包括:无人驾驶车辆内环绕的灯饰对应的数量和/或灯饰对应的工作参数。
88.根据本公开实施例,本公开还提供了一种电子设备、一种可读存储介质、一种计算机程序产品。
89.根据本公开实施例,本公开还提供了一种无人驾驶车辆,包括电子设备。
90.图9示出了可以用来实施本公开实施例的示例电子设备900的示意性框图。电子设备旨在表示各种形式的数字计算机,诸如,膝上型计算机、台式计算机、工作台、个人数字助理、服务器、刀片式服务器、大型计算机、和其它适合的计算机。电子设备还可以表示各种形式的移动装置,诸如,个人数字处理、蜂窝电话、智能电话、可穿戴设备和其它类似的计算装置。本文所示的部件、它们的连接和关系、以及它们的功能仅仅作为示例,并且不意在限制本文中描述的和/或者要求的本公开的实现。
91.如图9所示,设备900包括计算单元901,其可以根据存储在只读存储器(rom)902中的计算机程序或者从存储单元908加载到随机访问存储器(ram)903中的计算机程序,来执行各种适当的动作和处理。在ram 903中,还可存储设备900操作所需的各种程序和数据。计算单元901、rom 902以及ram 903通过总线904彼此相连。输入/输出(i/o)接口905也连接至总线904。
92.设备900中的多个部件连接至i/o接口905,包括:输入单元906,例如键盘、鼠标等;输出单元907,例如各种类型的显示器、扬声器等;存储单元908,例如磁盘、光盘等;以及通信单元909,例如网卡、调制解调器、无线通信收发机等。通信单元909允许设备900通过诸如因特网的计算机网络和/或各种电信网络与其他设备交换信息/数据。
93.计算单元901可以是各种具有处理和计算能力的通用和/或专用处理组件。计算单元901的一些示例包括但不限于中央处理单元(cpu)、图形处理单元(gpu)、各种专用的人工智能(ai)计算芯片、各种运行机器学习模型算法的计算单元、数字信号处理器(dsp)、以及任何适当的处理器、控制器、微控制器等。计算单元901执行上文所描述的各个方法和处理,例如控制无人驾驶车辆内部灯饰的方法。例如,在一些实施例中,控制无人驾驶车辆内部灯饰的方法可被实现为计算机软件程序,其被有形地包含于机器可读介质,例如存储单元908。在一些实施例中,计算机程序的部分或者全部可以经由rom 902和/或通信单元909而被载入和/或安装到设备900上。当计算机程序加载到ram 903并由计算单元901执行时,可以执行上文描述的控制无人驾驶车辆内部灯饰的方法的一个或多个步骤。备选地,在其他实施例中,计算单元901可以通过其他任何适当的方式(例如,借助于固件)而被配置为执行
控制无人驾驶车辆内部灯饰的方法。
94.本文中以上描述的系统和技术的各种实施方式可以在数字电子电路系统、集成电路系统、场可编程门阵列(fpga)、专用集成电路(asic)、专用标准产品(assp)、芯片上系统的系统(soc)、负载可编程逻辑设备(cpld)、计算机硬件、固件、软件、和/或它们的组合中实现。这些各种实施方式可以包括:实施在一个或者多个计算机程序中,该一个或者多个计算机程序可在包括至少一个可编程处理器的可编程系统上执行和/或解释,该可编程处理器可以是专用或者通用可编程处理器,可以从存储系统、至少一个输入装置、和至少一个输出装置接收数据和指令,并且将数据和指令传输至该存储系统、该至少一个输入装置、和该至少一个输出装置。
95.用于实施本公开的方法的程序代码可以采用一个或多个编程语言的任何组合来编写。这些程序代码可以提供给通用计算机、专用计算机或其他可编程数据处理装置的处理器或控制器,使得程序代码当由处理器或控制器执行时使流程图和/或框图中所规定的功能/操作被实施。程序代码可以完全在机器上执行、部分地在机器上执行,作为独立软件包部分地在机器上执行且部分地在远程机器上执行或完全在远程机器或服务器上执行。
96.在本公开的上下文中,机器可读介质可以是有形的介质,其可以包含或存储以供指令执行系统、装置或设备使用或与指令执行系统、装置或设备结合地使用的程序。机器可读介质可以是机器可读信号介质或机器可读储存介质。机器可读介质可以包括但不限于电子的、磁性的、光学的、电磁的、红外的、或半导体系统、装置或设备,或者上述内容的任何合适组合。机器可读存储介质的更具体示例会包括基于一个或多个线的电气连接、便携式计算机盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(eprom或快闪存储器)、光纤、便捷式紧凑盘只读存储器(cd-rom)、光学储存设备、磁储存设备、或上述内容的任何合适组合。
97.为了提供与用户的交互,可以在计算机上实施此处描述的系统和技术,该计算机具有:用于向用户显示信息的显示装置(例如,crt(阴极射线管)或者lcd(液晶显示器)监视器);以及键盘和指向装置(例如,鼠标或者轨迹球),用户可以通过该键盘和该指向装置来将输入提供给计算机。其它种类的装置还可以用于提供与用户的交互;例如,提供给用户的反馈可以是任何形式的传感反馈(例如,视觉反馈、听觉反馈、或者触觉反馈);并且可以用任何形式(包括声输入、语音输入或者、触觉输入)来接收来自用户的输入。
98.可以将此处描述的系统和技术实施在包括后台部件的计算系统(例如,作为数据服务器)、或者包括中间件部件的计算系统(例如,应用服务器)、或者包括前端部件的计算系统(例如,具有图形用户界面或者网络浏览器的用户计算机,用户可以通过该图形用户界面或者该网络浏览器来与此处描述的系统和技术的实施方式交互)、或者包括这种后台部件、中间件部件、或者前端部件的任何组合的计算系统中。可以通过任何形式或者介质的数字数据通信(例如,通信网络)来将系统的部件相互连接。通信网络的示例包括:局域网(lan)、广域网(wan)和互联网。
99.计算机系统可以包括客户端和服务器。客户端和服务器一般远离彼此并且通常通过通信网络进行交互。通过在相应的计算机上运行并且彼此具有客户端-服务器关系的计算机程序来产生客户端和服务器的关系。服务器可以是云服务器,也可以为分布式系统的服务器,或者是结合了区块链的服务器。
100.人工智能是研究计算机来模拟人的某些思维过程和智能行为(如学习、推理、思考、规划等)的学科,既有硬件层面的技术也有软件层面的技术。人工智能硬件技术一般包括如传感器、专用人工智能芯片、云计算、分布式存储、大数据处理等技术;人工智能软件技术主要包括计算机视觉技术、语音识别技术、自然语音处理技术以及机器学习/深度学习、大数据处理技术、知识图谱技术等几大方向。
101.应该理解,可以使用上面所示的各种形式的流程,重新排序、增加或删除步骤。例如,本发公开中记载的各步骤可以并行地执行也可以顺序地执行也可以不同的次序执行,只要能够实现本公开提及的技术方案所期望的结果,本文在此不进行限制。
102.上述具体实施方式,并不构成对本公开保护范围的限制。本领域技术人员应该明白的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和替代。任何在本公开的精神和原则之内所作的修改、等同替换和改进等,均应包含在本公开保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1