一种晶振振动实时纠正系统的制作方法
1.本发明涉及晶振电子技术领域,具体是指一种晶振振动实时纠正系统。
背景技术:
2.作为极为重要的基准频率,晶体振荡器(以下简称晶振)常常搭载在各种高速飞行器上,而高速飞行器通常都工作在极为恶劣的环境下,相应的,晶振就极易受到振动环境的影响,因此,高速飞行器对其使用的晶振在振动环境中的稳定度有着非常苛刻的要求。
3.以机载晶振为例,机载设备中的频率综合器需要晶振为其提供基准信号,然而外界环境对晶振的工作性能有较大的影响,主要表现在外界环境的振动和冲击会使晶振输出电信号特性变差,角偏量增大,从而无法满足作为高稳基频信号的要求。晶振减振系统的设计,应该在满足承载能力的条件下最大限度的降低系统的固有频率,以有效地隔离低频振动。但是降低系统固有频率的同时会减弱系统的抗冲击能力;而外界冲击会严重影响机载电子设备的性能,甚至造成设备的破坏。
4.以星载晶振为例,作为航天器重要的频率发生设备,为整星的多种单机提供时钟和本振信号,星载晶振输出信号的优劣将直接影响到单机性能的发挥,其重要性不言而喻,卫星设备从地面运输、试验到发射飞行,需要经历恶劣的力学环境,为确保星载晶振在试验、发射及在轨运行等各个阶段的安全可靠,提高星载晶振的抗振动冲击性能是十分重要且必要的。
5.振动环境对电子系统的性能提出了严格要求,而对作为核心器件的晶振要求更为苛刻,鉴于此需要一种在复杂环境下能够实时纠正振动漂移量的晶振。
技术实现要素:
6.本发明目的在于提供一种晶振振动实时纠正系统,旨在提供一种在复杂环境下能够实时纠正振动漂移量的晶振。
7.本发明通过下述技术方案实现:一种晶振振动实时纠正系统,包括:测量单元,用于测量晶振的静态角偏量与振动条件下的动态角偏量,产生角偏量信号并将信号传递至传输单元;传输单元,与测量单元信号连接,用于接收静态角偏量信号与动态角偏量信号,并进行运算得到振动漂移值,再根据振动漂移值产生纠正信号,最后将纠正信号传递至纠正单元;纠正单元,与传输单元信号连接,用于接收纠正信号,并根据纠正信号对晶振进行实时动态纠正。受外界环境扰动(主要包括机械扰动和电磁扰动)的影响,晶振的抖动幅度具有随机性和不可预见性,将直接影响到晶振信号输出,因此,对于晶振的实时纠正是十分有必要的。鉴于此,申请人提出了一种晶振振动实时纠正系统对复杂环境下的晶振振动情况进行纠正,具体通过:测量单元测量晶振在静态环境下的静态角偏量以及振动环境下的动态角偏量,并将上述角偏量信号传递至传输单元,传输单元经过运算得到晶振的振动漂移值后产生纠正信号,将纠正信号传递至纠正单元,纠正单元在结构上属于机械结构,但其能够通过内部的数控连杆接收纠正信号,并根据纠正信号对晶振的振动状态进行动态调整。
这里需要说明的是,数控连杆包括了单片机、液压缸及相应的连杆机构。
8.进一步地,测量单元包括:测量模块,用于测量晶振的静态角偏量与动态角偏量;筛选模块,与测量模块、传输单元信号连接,用于剔除预先设定阈值范围外的动态角偏量。由于单一环境下的晶振振动差异较大,针对不同环境的晶振振动漂移值也有较大差别,为了提高测量单元的灵敏度,可以优选设定一个阈值,以在此阈值范围内进行测量。
9.进一步地,传输单元包括:处理模块,与筛选模块信号连接,用于接收预先设定阈值范围内的动态角偏量信号与静态角偏量信号,再根据静态角偏量信号对动态角偏量信号进行差值运算,得到振动漂移值;拟合模块,与处理模块信号连接,用于接收振动漂移值,并对振动漂移值进行拟合,得到对应的拟合函数;纠正模块,与拟合模块信号连接,用于接收拟合函数,并根据拟合函数产生纠正信号。晶振在静态时的角偏量在理想情况下应为零,但是在大多数情况下,由于晶振自身理化性质或外界条件的影响,即使在静态时也会存在一定的角偏量,测量到静态角偏量后,将静态角偏量记录下来。当晶振在外界环境下处于动态时,测量其动态角偏量,经过差值运算后得到多组振动漂移值,振动漂移值经拟合模块进行拟合后,能够得到相应的拟合函数,拟合函数表征了当前振动环境下与振动漂移值恶化程度之间的函数关系式,基于此函数关系式纠正模块能够产生相匹配的纠正信号,从而控制纠正单元进行对应的反向振动调节。
10.进一步地,纠正单元包括:固定外壳,用于固定支撑的结构;晶振本体,设置在固定外壳内部;固定绳,中部与晶振本体连接且两端与固定外壳的内壁连接;纠正件,设置在晶振本体的下端面且与固定外壳的上端面连接,用于接收纠正信号,并根据纠正信号调节晶振本体的振动状态;阻尼油,填充在晶振本体与固定外壳之间;以及四个平衡件,用于平衡配重,活动设置在晶振本体的下端面且位于四个边角处;测量模块设置平衡件内;晶振本体处于悬空状态。基于上述结构,为了提高角偏量测量的精确度,将测量模块设置在平衡件内。
11.进一步地,纠正单元还包括紧固壳体,用于固定的结构,设置在固定外壳的内部;连接弹簧,一端与紧固壳体的边角连接,另一端与固定外壳的内壁连接;以及紧固件,用于缓冲固定减振,设置在紧固壳体的下端面且与固定外壳的上端面连接;晶振本体设置在紧固壳体内部;固定绳活动贯穿紧固壳体,中部与晶振本体连接且两端与固定外壳的内部连接;阻尼油还设置在晶振本体与紧固壳体之间。
12.需要说明的是,由于晶振本体与固定外壳通过纠正件连接,在纠正件的作用下能够明显纠正晶振的动态振动,但是以星载晶振为例,星载晶振的力学环境主要包括加速度、正弦、随机以及冲击,纠正件的纠正效力无法完全满足星载晶振的纠正要求判定。在此基础上,申请人在固定外壳的内部设置紧固壳体,紧固壳体能够作为固定外壳与晶振本体之间的“过渡层”,且固定绳活动贯穿紧固壳体与晶振本体连接,在紧固壳体的侧壁上对晶振壳体没有负面影响,在紧固壳体的下端面设置有紧固件,通过紧固件与紧固壳体的配合实现缓冲减振与固定保护。还需要说明的是,基于上述结构,将晶振本体侧壁上受到的振动冲击通过固定绳缓释到固定外壳上;将晶振本体下端面受到的振动冲击通过纠正件缓释到紧固壳体上,更需要说明的是,紧固壳体上的振动冲击能量通过紧固件缓释到固定外壳上。
13.进一步地,纠正件包括:连接座,上端面设置有连接杆;若干紧固弹簧,一端与固定外壳内部的上端面连接,另一端与连接座的下端面连接;若干数控连杆,一端与连接杆的外
周面连接,另一端与固定外壳内部的上端面连接,数控连杆包括了单片机、液压缸与连杆机构;以及连接球,设置在连接杆的上端面;晶振本体的下端面开设有连接腔,连接球设置在连接腔内。基于上述结构,数控连杆在接收到纠正信号后通过对液压缸的信号输入来调节连杆机构的伸长量,从而调节晶振的振动偏移值。需要说明的是,此仅为纠正单元一个较佳的实施方式。
14.进一步地,紧固件包括:紧固杆,一端与固定外壳内部的上端面连接,另一端与紧固壳体的下端面连接;紧固座,设置在紧固壳体重心的下方,两端与紧固壳体的下端面、固定外壳内部的上端面连接,紧固座的外部连接有若干平衡组件;平衡组件包括:平衡座,设置在固定外壳内部的上端面;平衡杆,中部与平衡座的上端铰接,一端与紧固座的外部铰接,平衡杆上开设有第一通孔与第二通孔,第一通孔与第二通孔位于平衡座的两端,两个弹簧件,均设置在固定外壳内部的上端面;一个弹簧件的上端与第一通孔连接,另一个弹簧件的上端与第二通孔连接。
15.基于上述结构,通过设置在紧固壳体重心下方的紧固座来对紧固壳体整体进行支撑,并且紧固座自身存在一定的缓冲性能,当紧固座单独设置时能够作为一个减振器对紧固壳体进行消能减振。还需要说明的是,在紧固壳体的下端面与固定外壳的上端面之间还设置有若干紧固杆,用于辅助支撑减振。紧固壳体与固定外壳的上端面之间还设置有若干平衡组件,平衡组件内的平衡杆一端与紧固座的上端铰接,另一端连接有弹簧件,且平衡杆的中部铰接在平衡座的上端,当紧固壳体受到外界环境的振动冲击时,紧固壳体将振动冲击力缓释到紧固座,并且联动平衡杆的运动完成卸力减振作用。
16.本发明与现有技术相比,具有如下的优点和有益效果:1、本发明通过测量单元能够测量晶振的振动状态,并通过传输单元产生纠正信号,纠正单元根据接收到的纠正信号对晶振的振动状态进行纠正,从而在复杂环境下也能够实时纠正振动漂移量的晶振;2、本发明通过在固定外壳内设置紧固壳体与紧固件,将晶振本体受到外界环境的振动冲击力通过紧固件缓释分散到固定外壳,抗振动冲击性能得到进一步提升;3、本发明的机械结构对于晶振自身的减振性能有了极大提高。
附图说明
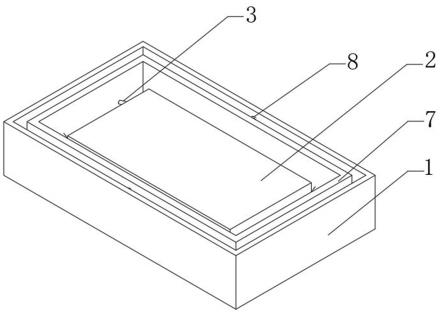
17.此处所说明的附图用来提供对本发明实施例的进一步理解,构成本技术的一部分,并不构成对本发明实施例的限定。在附图中:图1为本发明的结构示意图;图2为本发明的俯视图;图3为本发明的剖视图;图4为图3中a的放大结构示意图;图5为纠正件的正视图;图6为纠正件的轴视图;图7为紧固件的结构示意图;图8为图7中b的放大结构示意图。
18.附图中标记及对应的零部件名称:
1-固定外壳,2-晶振本体,21-连接腔,3-固定绳,4-阻尼油,5-纠正件,51-连接球,52-连接杆,53-连接座,54-数控连杆,55-紧固弹簧,6-平衡件,7-紧固壳体,8-连接弹簧,9-紧固件,91-紧固座,92-紧固杆,93-平衡组件,931-平衡座,932-平衡杆,9321-第一通孔,9322-第二通孔,933-弹簧件。
具体实施方式
19.为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。需要说明的是,本发明已经处于实际研发使用阶段。
20.实施例:请一并参考附图1至图8,一种晶振振动实时纠正系统,包括:测量单元,用于测量晶振的静态角偏量与振动条件下的动态角偏量,产生角偏量信号并将信号传递至传输单元;传输单元,与测量单元信号连接,用于接收静态角偏量信号与动态角偏量信号,并进行运算得到振动漂移值,再根据振动漂移值产生纠正信号,最后将纠正信号传递至纠正单元;纠正单元,与传输单元信号连接,用于接收纠正信号,并根据纠正信号对晶振进行实时动态纠正。受外界环境扰动(主要包括机械扰动和电磁扰动)的影响,晶振的抖动幅度具有随机性和不可预见性,将直接影响到晶振信号输出,因此,对于晶振的实时纠正是十分有必要的。鉴于此,申请人提出了一种晶振振动实时纠正系统对复杂环境下的晶振振动情况进行纠正,具体通过:测量单元测量晶振在静态环境下的静态角偏量以及振动环境下的动态角偏量,并将上述角偏量信号传递至传输单元,传输单元经过运算得到晶振的振动漂移值后产生纠正信号,将纠正信号传递至纠正单元,纠正单元在结构上属于机械结构,但其能够通过内部的数控连杆54接收纠正信号,并根据纠正信号对晶振的振动状态进行动态调整。这里需要说明的是,数控连杆54包括了单片机、液压缸及相应的连杆机构。
21.需要说明的是,测量单元包括:测量模块,用于测量晶振的静态角偏量与动态角偏量;筛选模块,与测量模块、传输单元信号连接,用于剔除预先设定阈值范围外的动态角偏量。由于单一环境下的晶振振动差异较大,针对不同环境的晶振振动漂移值也有较大差别,为了提高测量单元的灵敏度,可以优选设定一个阈值,以在此阈值范围内进行测量。
22.需要说明的是,传输单元包括:处理模块,与筛选模块信号连接,用于接收预先设定阈值范围内的动态角偏量信号与静态角偏量信号,再根据静态角偏量信号对动态角偏量信号进行差值运算,得到振动漂移值;拟合模块,与处理模块信号连接,用于接收振动漂移值,并对振动漂移值进行拟合,得到对应的拟合函数;纠正模块,与拟合模块信号连接,用于接收拟合函数,并根据拟合函数产生纠正信号。晶振在静态时的角偏量在理想情况下应为零,但是在大多数情况下,由于晶振自身理化性质或外界条件的影响,即使在静态时也会存在一定的角偏量,测量到静态角偏量后,将静态角偏量记录下来。当晶振在外界环境下处于动态时,测量其动态角偏量,经过差值运算后得到多组振动漂移值,振动漂移值经拟合模块进行拟合后,能够得到相应的拟合函数,拟合函数表征了当前振动环境下与振动漂移值恶化程度之间的函数关系式,基于此函数关系式纠正模块能够产生相匹配的纠正信号,从而控制纠正单元进行对应的反向振动调节。
23.需要说明的是,纠正单元包括:固定外壳1,用于固定支撑的结构;晶振本体2,设置
在固定外壳1内部;固定绳3,中部与晶振本体2连接且两端与固定外壳1的内壁连接;纠正件5,设置在晶振本体2的下端面且与固定外壳1的上端面连接,用于接收纠正信号,并根据纠正信号调节晶振本体2的振动状态;阻尼油4,填充在晶振本体2与固定外壳1之间;以及四个平衡件6,用于平衡配重,活动设置在晶振本体2的下端面且位于四个边角处;测量模块设置平衡件6内;晶振本体2处于悬空状态。基于上述结构,为了提高角偏量测量的精确度,将测量模块设置在平衡件6内。
24.还需要说明的是,具体通过阻尼油4的减振、缓冲性能和固定绳3的弹性能够消减部分的振动或冲击产生的能量,并起到保护的作用,此结构下的固定外壳1和阻尼油4能对晶振本体2产生多重保护作用,从而大大减小外界环境的振动冲击对晶振本体2的影响。还需要说明的是,阻尼油4优选地是粘度为800cps~1000cps的硅油,并且粘度可以根据晶振的具体使用环境进行调整,此数据仅为优选的数据之一。硅油具有优良的减振、缓冲、阻尼、密封性能以及化学稳定性,并且使用寿命长,还兼有吸收振动,防止振动传播的功能,作为耗能降噪稳速的介质效果十分显著。
25.需要说明的是,纠正单元还包括紧固壳体7,用于固定的结构,设置在固定外壳1的内部;连接弹簧8,一端与紧固壳体7的边角连接,另一端与固定外壳1的内壁连接;以及紧固件9,用于缓冲固定减振,设置在紧固壳体7的下端面且与固定外壳1的上端面连接;晶振本体2设置在紧固壳体7内部;固定绳3活动贯穿紧固壳体7,中部与晶振本体2连接且两端与固定外壳1的内部连接;阻尼油4还设置在晶振本体2与紧固壳体7之间。
26.还需要说明的是,由于晶振本体2与固定外壳1通过纠正件5连接,在纠正件5的作用下能够明显纠正晶振的动态振动,但是以星载晶振为例,星载晶振的力学环境主要包括加速度、正弦、随机以及冲击,纠正件5的纠正效力无法完全满足星载晶振的纠正要求判定。在此基础上,申请人在固定外壳1的内部设置紧固壳体7,紧固壳体7能够作为固定外壳1与晶振本体2之间的“过渡层”,且固定绳3活动贯穿紧固壳体7与晶振本体2连接,在紧固壳体7的侧壁上对晶振壳体没有负面影响,在紧固壳体7的下端面设置有紧固件9,通过紧固件9与紧固壳体7的配合实现缓冲减振与固定保护。还需要说明的是,基于上述结构,将晶振本体2侧壁上受到的振动冲击通过固定绳3缓释到固定外壳1上;将晶振本体2下端面受到的振动冲击通过纠正件5缓释到紧固壳体7上,更需要说明的是,紧固壳体7上的振动冲击能量通过紧固件9缓释到固定外壳1上。
27.需要说明的是,纠正件5包括:连接座53,上端面设置有连接杆52;若干紧固弹簧55,一端与固定外壳1内部的上端面连接,另一端与连接座53的下端面连接;若干数控连杆54,一端与连接杆52的外周面连接,另一端与固定外壳1内部的上端面连接,数控连杆54包括了单片机、液压缸与连杆机构;以及连接球51,设置在连接杆52的上端面;晶振本体2的下端面开设有连接腔21,连接球51设置在连接腔21内。基于上述结构,数控连杆54在接收到纠正信号后通过对液压缸的信号输入来调节连杆机构的伸长量,从而调节晶振的振动偏移值。需要说明的是,此仅为纠正单元一个较佳的实施方式。
28.还需要说明的是,在连接座53的下端面设置有紧固弹簧55,紧固弹簧55、连接座53、连接杆52、连接球51以及晶振本体2能够作为一个弹簧减振系统,并且在本发明中还设置有数控连杆54,数控连杆54的两端与连接杆52的外周、固定外壳1的上端面进行连接,连杆机构的多自由度能够对上述弹簧减振系统的消能减振系统进行进一步的优化。
29.进一步地,紧固件9包括:紧固杆92,一端与固定外壳1内部的上端面连接,另一端与紧固壳体7的下端面连接;紧固座91,设置在紧固壳体7重心的下方,两端与紧固壳体7的下端面、固定外壳1内部的上端面连接,紧固座91的外部连接有若干平衡组件93;平衡组件93包括:平衡座931,设置在固定外壳1内部的上端面;平衡杆932,中部与平衡座931的上端铰接,一端与紧固座91的外部铰接,平衡杆932上开设有第一通孔9321与第二通孔9322,第一通孔9321与第二通孔9322位于平衡座931的两端,两个弹簧件933,均设置在固定外壳1内部的上端面;一个弹簧件933的上端与第一通孔9321连接,另一个弹簧件933的上端与第二通孔9322连接。
30.基于上述结构,通过设置在紧固壳体7重心下方的紧固座91来对紧固壳体7整体进行支撑,并且紧固座91自身存在一定的缓冲性能,当紧固座91单独设置时能够作为一个减振器对紧固壳体7进行消能减振。还需要说明的是,在紧固壳体7的下端面与固定外壳1的上端面之间还设置有若干紧固杆92,用于辅助支撑减振。紧固壳体7与固定外壳1的上端面之间还设置有若干平衡组件93,平衡组件93内的平衡杆932一端与紧固座91的上端铰接,另一端连接有弹簧件933,且平衡杆932的中部铰接在平衡座931的上端,当紧固壳体7受到外界环境的振动冲击时,紧固壳体7将振动冲击力缓释到紧固座91,并且联动平衡杆932的运动完成卸力减振作用。
31.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1