一种I/O电路抗干扰电路及方法与流程
一种i/o电路抗干扰电路及方法
技术领域
1.本技术涉及工业机器人i/o系统领域,尤其涉及一种i/o电路抗干扰电路及方法。
背景技术:
2.工业机器人i/o系统在工业机器人系统应用中占有极其重要的位置,它是机器人与周边外围设备完成信息交互的主要通道:工业机器人中,将按钮、行程开关、限位开关、接近开关、传感器、电磁阀、继电器等设备通过端子的形式与机器人i/o接口连接,对其进行数据采集或控制。工业机器人工况复杂且恶劣,加之伺服驱动器本身就是一个干扰源,uvw线对外部干扰也较大,所以对i/o系统的抗干扰能力有较高的要求。
3.现有的工业机器人i/o系统仅仅采用光电耦合隔离,以防止高频干扰信号传入影响系统稳定运行和强电对系统的破坏,但是对于因机器人耦合到控制线上的干扰起不到抗干扰的作用,常常会因为干扰导致机器人控制系统误动作造成机器人触发急停停机,更可怕的是导致急停信号失效,造成损失。因此,现有的i/o电路不足以满足工业机器人电磁干扰较恶劣的工况环境,机器人在工作现场经常遇到误动作的情况。
技术实现要素:
4.为了解决上述技术问题或者至少部分地解决上述技术问题,本技术提供了一种i/o电路抗干扰电路及方法。
5.第一方面,本技术提供了一种i/o电路抗干扰电路,包括:光电隔离输入电路和稳压二极管,其中,所述光电隔离输入电路包括光耦,所述稳压二极管的阳极接地,所述稳压二极管的阴极连接所述光耦中发光二极管的阴极。
6.优选地,所述光耦中发光二极管的阳极连接第一电压。
7.优选地,还包括:第一电阻,所述第一电阻的第一端与所述第一电压连接,所述第一电阻的第二端与所述光耦中发光二极管的阳极连接。
8.优选地,所述光耦中光敏电阻的第一端连接第二电压,所述光敏电阻的第二端分别接地和连接机器人控制系统。
9.优选地,还包括:第二电阻,所述第二电阻的第一端接地,所述第二电阻的第二端连接所述光敏电阻的第二端。
10.优选地,还包括:第一开关,所述第一开关的第一端接地,所述第一开关的第二端连接所述稳压二极管的阳极。
11.第二方面,本技术提供了一种i/o电路抗干扰方法,所述方法包括步骤:
12.在光电隔离输入电路旁配置稳压二极管;
13.将所述稳压二极管的阳极接地;
14.将所述稳压二极管的阴极连接所述光电隔离输入电路中光耦的发光二极管的阳极。
15.优选地,将所述光耦中发光二极管的阳极连接第一电压,将所述光电隔离输入电
路中第一电阻的第一端与所述第一电压连接,将所述第一电阻的第二端与所述光耦中发光二极管的阳极连接。
16.优选地,将所述光耦中光敏电阻的第一端连接第二电压,将所述光耦的光敏电阻的第二端分别接地和连接机器人控制系统。
17.优选地,将所述光电隔离输入电路中第二电阻的第一端接地,将所述第二电阻的第二端连接所述光敏电阻的第二端。
18.本技术实施例提供的上述技术方案与现有技术相比具有如下优点:
19.本技术提供的一种i/o电路抗干扰电路及方法有效地增强了工业机器人i/o系统输入接口的抗干扰能力。
附图说明
20.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本发明的实施例,并与说明书一起用于解释本发明的原理。
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
22.图1为现有设计中的光电隔离输入电路的示意图;
23.图2为现有设计中的光电隔离输入电路的状态示意图;
24.图3为本技术实施例提供的一种i/o电路抗干扰电路的示意图;
25.图4为本技术实施例提供的一种i/o电路抗干扰电路的状态示意图。
具体实施方式
26.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
27.图1为现有设计中的光电隔离输入电路的示意图,图2为现有设计中的光电隔离输入电路的状态示意图。
28.参照图1-2可以发现,对于现有的光耦隔离电路,只要干扰源有1个低于(vcc1-0.7)v的电平信号就可能使光耦导通,从而导致机器人误动作。
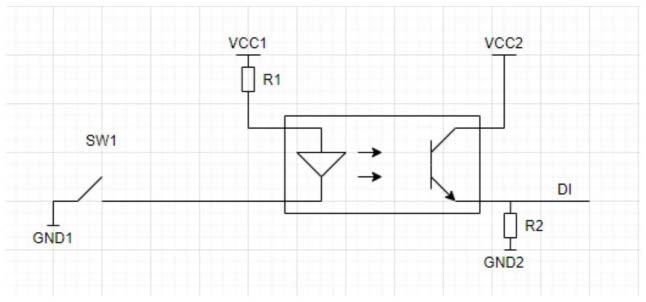
29.图3为本技术实施例提供的一种i/o电路抗干扰电路的示意图,图4为本技术实施例提供的一种i/o电路抗干扰电路的状态示意图。
30.本技术提供了一种i/o电路抗干扰电路,包括:光电隔离输入电路和稳压二极管d1,其中,所述光电隔离输入电路包括光耦,所述稳压二极管d1的阳极接地,所述稳压二极管d1的阴极连接所述光耦中发光二极管的阴极。
31.参照图3-4可以发现,对于图1中现有的光耦隔离电路,在光耦隔离电路中光耦的前级加入一个稳压二极管d1,可以使光耦隔离电路的输入有效电平钳位到一个确定的范围,增强抗干扰能力。具体地,本技术在光耦前级增加一个稳压二极管d1,将导通电平钳位到(vcc1-vd1-0.7)v,且干扰源电流小于稳压二极管d1击穿电流时光耦也不导通,有效的增
强输入接口的抗干扰能力。
32.在本技术中,所述光耦中发光二极管的阳极连接第一电压vcc1。
33.具体地,第一电压vcc1用于为发光二极管的正常工作提供电源支持。
34.在本技术中,本技术提供的一种i/o电路抗干扰电路还包括:第一电阻r1,所述第一电阻r1的第一端与所述第一电压vcc1连接,所述第一电阻r1的第二端与所述光耦中发光二极管的阳极连接。
35.具体地,第一电阻r1用于为发光二极管的正常工作而分压。
36.在本技术中,所述光耦中光敏电阻的第一端连接第二电压vcc2,所述光敏电阻的第二端分别接地和连接机器人控制系统。
37.具体地,第二电压vcc2用于为光敏电阻的正常工作提供电源支持。
38.在本技术中,本技术提供的一种i/o电路抗干扰电路还包括:第二电阻r2,所述第二电阻r2的第一端接地,所述第二电阻r2的第二端连接所述光敏电阻的第二端。
39.具体地,第二电阻r2用于为光敏电阻的正常工作而分压。
40.在本技术中,本技术提供的一种i/o电路抗干扰电路还包括:第一开关sw1,所述第一开关sw1的第一端接地,所述第一开关sw1的第二端连接所述稳压二极管d1的阳极。
41.具体地,第一开关sw1用于导通或断开稳压二极管d1的正常工作。第一开关sw1可以为:按钮、行程开关、限位开关、接近开关、传感器、电磁阀、继电器等设备。
42.本技术提供了一种i/o电路抗干扰方法,所述方法包括步骤:
43.在光电隔离输入电路旁配置稳压二极管d1;
44.将所述稳压二极管d1的阳极接地;
45.将所述稳压二极管d1的阴极连接所述光电隔离输入电路中光耦的发光二极管的阳极。
46.参照图1-4可以发现,对于图1中现有的光耦隔离电路,图3中的电路在光耦隔离电路中光耦的前级加入一个稳压二极管d1,可以使光耦隔离电路的输入有效电平钳位到一个确定的范围,增强抗干扰能力。具体地,本技术在光耦前级增加一个稳压二极管d1,将导通电平钳位到(vcc1-vd1-0.7)v,且干扰源电流小于稳压二极管d1击穿电流时光耦也不导通,有效的增强输入接口的抗干扰能力。
47.在本技术中,将所述光耦中发光二极管的阳极连接第一电压vcc1,将所述光电隔离输入电路中第一电阻r1的第一端与所述第一电压vcc1连接,将所述第一电阻r1的第二端与所述光耦中发光二极管的阳极连接。
48.具体地,第一电压vcc1用于为发光二极管的正常工作提供电源支持,第一电阻r1用于为发光二极管的正常工作而分压。
49.在本技术中,将所述光耦中光敏电阻的第一端连接第二电压vcc2,将所述光耦的光敏电阻的第二端分别接地和连接机器人控制系统。
50.具体地,第二电压vcc2用于为光敏电阻的正常工作提供电源支持。
51.在本技术中,将所述光电隔离输入电路中第二电阻r2的第一端接地,将所述第二电阻r2的第二端连接所述光敏电阻的第二端。
52.具体地,第二电阻r2用于为光敏电阻的正常工作而分压。
53.本技术提供的一种i/o电路抗干扰电路及方法有效地增强了工业机器人i/o系统
输入接口的抗干扰能力。
54.需要说明的是,在本文中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
55.以上所述仅是本发明的具体实施方式,使本领域技术人员能够理解或实现本发明。对这些实施例的多种修改对本领域的技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所申请的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1