一种高精度耐用的遥控器滚轮的制作方法
1.本实用新型涉及无人机及机器人技术领域,具体为一种高精度耐用的遥控器滚轮。
背景技术:
2.无人机按应用领域,可分为军用与民用。在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
3.无人机操控人员需要精准的控制无人机吊舵及相机等来捕捉或者跟踪物体,目前传统无人机遥控器滚轮都采用电位器来结构。滚轮与电位器直接接触,通过滚轮的结构带动电位器转动,实现信号传输,这种方式的结构阻力较大,容易磨损,长时间使用后用精度降低,电位器会有较大虚位,精度低,为此,提出一种高精度耐用的遥控器滚轮。
技术实现要素:
4.本实用新型的目的在于提供一种高精度耐用的遥控器滚轮,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种高精度耐用的遥控器滚轮,包括驱动组件和支撑组件,所述驱动组件位于所述支撑组件的上方,所述支撑组件的内部通过固定组件连接有滚轮本体;
6.所述驱动组件包括编码器本体,所述编码器本体的一侧安装有编码器pcb板;
7.所述支撑组件包括支撑架,所述支撑架的顶部固定连接有凸起块,所述支撑架的底部固定连接有两个连接块,所述连接块的底部固定连接有插块,所述滚轮本体的外侧开设有两个弧形通槽,所述插块的一端贯穿所述弧形通槽,所述滚轮本体的一侧固定插入有转轴,所述转轴的外侧依次套接有扭簧、轴承和磁环,所述凸起块的底部开设有与所述轴承相适配的第一凹槽,所述第一凹槽的内部顶壁开设有与所述磁环相适配的第二凹槽。
8.作为优选,上述所述固定组件包括压板,所述压板的一侧开设有第一通孔,所述转轴的一端贯穿所述滚轮本体插入于所述第一通孔的内部。
9.作为优选,上述所述压板的一侧开设有两个第二通孔,两个所述第二通孔位于所述第一通孔的两侧,所述第二通孔的内部螺纹插入有固定螺丝。
10.作为优选,上述所述插块的底部开设有与所述固定螺丝相适配的螺纹孔,所述固定螺丝的顶端贯穿所述第二通孔螺纹插入于所述螺纹孔的内部,所述压板的一侧固定连接有两个垫片。
11.作为优选,上述所述磁环的外径小于所述轴承的外径,所述磁环插入于所述第二凹槽的内部,所述轴承插入于所述第一凹槽的内部。
12.作为优选,上述所述支撑架的底部固定连接有弧形挡板。
13.与现有技术相比,本实用新型的有益效果是:本实用新型使用时,将扭簧结构卡入滚轮本体,再将轴承和磁环通过胶水装于滚轮本体的转轴上,最后把滚轮本体装入支撑组件内,再装入无人机的机身结构上,驱动组件的编码器pcb板也固定在无人机的机身上,与滚轮本体保持一定距离,这种设计结构,使得滚轮本体与编码器本体是通过磁力传递信号的,无直接结构接触,控制滚轮本体转动,降低结构阻力,减少结构磨损,手感好,保持零部件结构精度,延长了滚轮本体的使用寿命。
附图说明
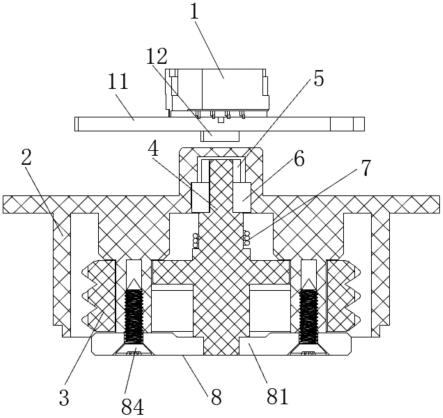
14.图1为本实用新型的结构示意图;
15.图2为本实用新型的滚轮本体的爆炸结构示意图;
16.图3为本实用新型的支撑架的剖视结构示意图;
17.图4为本实用新型的滚轮本体的结构示意图;
18.图5为本实用新型的支撑架的结构示意图。
19.图中:1、驱动组件;11、编码器pcb板;12、编码器本体;2、支撑组件;21、支撑架;22、凸起块;23、弧形挡板;24、连接块;25、插块;26、螺纹孔;27、第一凹槽;28、第二凹槽;3、滚轮本体;4、转轴;5、磁环;6、轴承;7、扭簧;8、固定组件;81、压板;82、第一通孔;83、第二通孔;84、固定螺丝;9、弧形通槽。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.实施例
22.请参阅图1-5,本实用新型提供一种技术方案:一种高精度耐用的遥控器滚轮,包括驱动组件1和支撑组件2,驱动组件1位于支撑组件2的上方,支撑组件2的内部通过固定组件8连接有滚轮本体3,固定组件8包括压板81,压板81的一侧开设有第一通孔82,压板81将滚轮本体3压入支撑架21的内侧,转轴4的一端贯穿滚轮本体3插入于第一通孔82的内部,压板81的一侧开设有两个第二通孔83,两个第二通孔83位于第一通孔82的两侧,第二通孔83的内部螺纹插入有固定螺丝84,插块25的底部开设有与固定螺丝84相适配的螺纹孔26,固定螺丝84的顶端贯穿第二通孔83螺纹插入于螺纹孔26的内部,压板81的一侧固定连接有两个垫片,拧动固定螺丝84,固定螺丝84的一端螺纹插入于螺纹孔26的内部,从而将滚轮本体3安装于支撑架21的内侧,支撑架21的底部固定连接有弧形挡板23,弧形挡板23对滚轮本体3起到防护作用。
23.驱动组件1包括编码器本体12,编码器本体12的一侧安装有编码器pcb板11。
24.支撑组件2包括支撑架21,支撑架21的顶部固定连接有凸起块22,支撑架21的底部固定连接有两个连接块24,连接块24的底部固定连接有插块25,滚轮本体3的外侧开设有两个弧形通槽9,插块25的一端贯穿弧形通槽9,滚轮本体3的一侧固定插入有转轴4,转轴4的外侧依次套接有扭簧7、轴承6和磁环5,磁环5的外径小于轴承6的外径,磁环5插入于第二凹
槽28的内部,轴承6插入于第一凹槽27的内部,第一凹槽27和第二凹槽28分别对轴承6和磁环5起到防护作用,凸起块22的底部开设有与轴承6相适配的第一凹槽27,第一凹槽27的内部顶壁开设有与磁环5相适配的第二凹槽28。本实用新型使用时,将扭簧7结构卡入滚轮本体3,再将轴承6和磁环5通过胶水装于滚轮本体3的转轴4上,最后把滚轮本体3装入支撑组件2内,再装入无人机的机身结构上,驱动组件1的编码器pcb板11也固定在无人机的机身上,与滚轮本体3保持一定距离,这种设计结构,使得滚轮本体3与编码器本体12是通过磁力传递信号的,无直接结构接触,控制滚轮本体3转动,降低结构阻力,减少结构磨损,手感好,保持零部件结构精度,延长了滚轮本体3的使用寿命。
25.工作原理或者结构原理,使用时,将扭簧7结构卡入滚轮本体3,再将轴承6和磁环5通过胶水装于滚轮本体3的转轴4上,最后把滚轮本体3装入支撑组件2的支撑架21内,拧动固定螺丝84,固定螺丝84的一端螺纹插入于螺纹孔26的内部,从而将滚轮本体3安装于支撑架21的内侧,通过压板81对滚轮本体3进行固定,最后整个实用新型装入无人机的机身结构上,驱动组件1的编码器pcb板11也固定在无人机的机身上,与滚轮本体3保持一定距离,无直接接触。
26.滚轮本体3与编码器本体12是通过磁力传递信号的,无直接结构接触,控制滚轮本体3转动,降低结构阻力,减少结构磨损,手感好,保持零部件结构精度,延长了滚轮本体3的使用寿命,本实用新型的编码器本体12采用的是16位数字分辨率,精度为65536,远高于传统电位器的精度,现有专利精度为4096。
27.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1