一种全自动辅料成型装置的制作方法
1.本实用新型涉及产品辅料贴附领域,尤其涉及一种全自动辅料成型装置。
背景技术:
2.目前国内制造业在3c自动化产品辅料贴附行业占比较重,随着智能化行业的不断发展,这部分份额还在不断的增长。而人工贴附的方式基本包括如下步骤:
3.人工将一叠片料放置在操作台上,手动用刀片将辅料从片料膜上剥离下来,然后将辅料手动贴附在产品相应位置进行折弯成型,其精度差,质量不可控,效率低。
4.人工手动贴附,这样既增加人工成本,会制约测试设备的自动化程度,无法实现高效率高产量。
5.随着自动化行业的快速发展,对消费类电子元器件贴装控制越来越严,对零部件此类工序的精度和效率把控越来越高。所以对这种传统的手工成型折弯工序迫切需要导入新型自动化设备,以机器生产代替手工作业,降低成本,提高效率,把控精度。因此技术上急需这样一种能给摄像头模组铜箔成型折弯的自动化系统。
技术实现要素:
6.为了解决现有技术中的问题,本实用新型提供了一种全自动辅料成型装置。
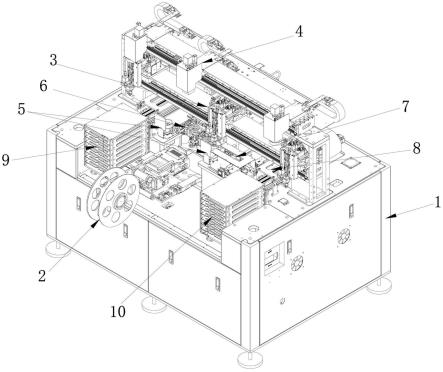
7.本实用新型提供了一种全自动辅料成型装置,包括下机架及设于所述下机架上的飞达供料机构、吸附机构、视觉检测机构、辅料翻转机构、弯折机构、托料输送机构、产品上料机构和产品下料机构,所述飞达供料机构包括接料平台、设于接料平台一端的放卷机构及设于所述接料平台另一端的剥膜机构,所述吸附机构包括支撑横梁及能够在所述支撑横梁上水平移动的吸嘴组件,所述视觉检测机构包括位于所述吸附机构上方的下视觉模块及位于所述吸附机构一侧的上视觉模块,所述辅料翻转机构设于所述吸附机构下方,所述弯折机构设于所述吸附机构靠近所述上视觉模块的一侧,所述托料输送机构设于所述吸附机构下方且与所述支撑横梁水平垂直设置,所述产品上料机构及所述产品下料机构分别设于所述飞达供料机构两侧。
8.作为本实用新型的进一步改进,所述下视觉模块包括设于所述支撑横梁上端的视觉模块支撑梁及设于所述视觉模块支撑梁上的下视觉检测相机。
9.作为本实用新型的进一步改进,所述上视觉模块包括上视觉检测相机、环形光源及遮光板,所述环形光源设于所述上视觉检测相机的上端,所述遮光板设于所述上视觉检测相机一侧。
10.作为本实用新型的进一步改进,所述辅料翻转机构包括吸附翻转组件,所述吸附翻转组件包括支撑背板、与所述支撑背板滑动连接的翻转驱动电机及用于驱动所述翻转驱动电机在所述支撑背板上下滑动的升降气缸,所述翻转驱动电机包括机体及旋转轴,所述旋转轴与所述翻转驱动电机的滑动方向垂直设置,所述旋转轴的自由端安装有与所述旋转轴垂直设置的翻转吸嘴。
机体;63-旋转轴;64-翻转吸嘴;65-翻转真空发生器;71-支撑板;72-固定底板;73-物料吸附平台;74-伸缩电机;75-支撑座;76-压料舌片;77-滑动支架;78-升降电机;79-弯折真空发生器;81-丝杆模组;82-托盘;83-对射传感器;91-第一物料收集弹夹;92-上料顶升组件;101-第二物料收集弹夹;102-下料顶升组件。
具体实施方式
28.如图1至图9所示,本实用新型公开了一种全自动辅料成型装置,包括下机架1及设于所述下机架1上的飞达供料机构2、吸附机构3、视觉检测机构、辅料翻转机构6、弯折机构7、托料输送机构8、产品上料机构9和产品下料机构10,所述下机架1上端罩有上机罩,在上机罩顶端预留有安装孔位用来安装ffu空气净化器,以此来达到净化空气,满足机器运转时对无尘等级的需求,所述飞达供料机构2包括接料平台21、设于接料平台21一端的放卷机构22及设于所述接料平台21另一端的剥膜机构23,所述吸附机构3包括支撑横梁31及能够在所述支撑横梁31上水平移动的吸嘴组件32,所述视觉检测机构包括位于所述吸附机构3上方的下视觉模块4及位于所述吸附机构3一侧的上视觉模块5,所述辅料翻转机构6设于所述吸附机构3下方,所述弯折机构7设于所述吸附机构3靠近所述上视觉模块5的一侧,所述托料输送机构8设于所述吸附机构3下方且与所述支撑横梁31水平垂直设置,所述产品上料机构9及所述产品下料机构10分别设于所述飞达供料机构2两侧。
29.工作时,上料机构通过托料输送机构8进行产品上料,飞达供料机构2进行辅料供料,吸附机构3从托料输送机构8处吸取镜头模组产品移至贴合位,同时辅料翻转机构6从飞达供料机构2的接料平台21上吸取辅料并翻转180度与吸附机构3上的镜头模组相接触,完成贴合,吸附机构3将贴合好的产品放置在弯折机构7上进行弯折操作,弯折完成后,通过吸附机构3将弯折后的产品移送到下料机构处进行下料。
30.该技术方案克服了人工贴附成型的成本高,效率低而贴装精度不理想等一系列问题,大大提高了生产效率,减少了人力成本,且贴附精度可控,效率更高。
31.本技术方案中,所述下视觉模块4包括设于所述支撑横梁31上端的视觉模块支撑梁41及设于所述视觉模块支撑梁41上的下视觉检测相机42,所述上视觉模块5包括上视觉检测相机51、环形光源52及遮光板53,所述环形光源52设于所述上视觉检测相机51的上端,所述遮光板53设于所述上视觉检测相机51一侧,下视觉检测相机42及上视觉检测相机51用于检测能够对吸附的产品及辅料进行拍照定位,方便进行位置补偿调整,提高贴附精度。
32.本技术方案中,所述辅料翻转机构6包括吸附翻转组件,所述吸附翻转组件包括支撑背板61、与所述支撑背板61滑动连接的翻转驱动电机及用于驱动所述翻转驱动电机在所述支撑背板61上下滑动的升降气缸,所述翻转驱动电机包括机体62及旋转轴63,所述旋转轴63与所述翻转驱动电机的滑动方向垂直设置,所述旋转轴63的自由端安装有与所述旋转轴63垂直设置的翻转吸嘴64,工作时,升降气缸带动翻转驱动电机下降到接料盘上方,并通过翻转吸嘴64将接料盘上的辅料吸附住,然后升降气缸带动翻转驱动电机上升,此时翻转驱动电机的旋转轴63转动,使其吸嘴旋转180
°
,最后吸附机构3的吸嘴组件32将其翻转吸嘴64上的辅料吸取并放置到对应的贴附位置进行贴附,吸嘴组件32接料后旋转轴63再旋转180
°
回到取料初始位置等待下次取料。
33.该辅料吸附翻转组件结构简单,能够将辅料从一个位置转移到另一个位置处等待
上料,能够更好的实现辅料上料的自动化程度,而且其灵活性更好。
34.本技术方案中,所述弯折机构7包括折边组件,所述折边组件包括支撑板71、固定底板72、物料吸附平台73及折边机构,所述支撑板71下端与所述固定底板72之间设有上下滑动支架77,所述支撑板71中部设有过孔,所述物料吸附平台73穿过所述过孔固定在所述固定底板72上,所述固定底板72一侧设有用于控制所述支撑板71上下移动的升降电机78,所述折边机构包括折边伸缩电机74、滑块、支撑座75及压料舌片76,所述折边伸缩电机74包括固定在所述支撑板71上端的主体及一端与所述支撑座75一端螺纹连接的旋转螺杆,所述滑块上端与所述支撑座75固定连接,所述滑块下端与所述支撑板71滑动连接,所述压料舌片76横向固定在所述支撑座75另一端,所述折边机构包括分别围绕在所述物料吸附平台73上周围的第一折边机构、第二折边机构及第三折边机构,所述第一折边机构的压料舌片76与所述第二折边机构的压料舌片76相对设置且均与所述第二折边机构的压料舌片76垂直设置。
35.工作时,产品由吸嘴组件32吸附放置到物料吸附平台73上端进行固定,此时第一折边机构的压料舌片76、第二折边机构的压料舌片76及第三折边机构的压料舌片76同时向物料吸附平台73中心移动,当移动到折边位置后,升降电机78带动支撑板71整体下降,此时三组压料舌片76会压于辅料使其向下弯折成型,当完成弯折成型动作后,三组压料舌片76同时后退至预定位置,升降电机78电动支撑板71整体上升,准备下次弯折。
36.本技术方案中,所述托料输送机构8包括固定在所述支撑横梁31下方的丝杆模组81及设于所述丝杆模组81上端且能够在所述丝杠模组上移动的托盘82,所述丝杆模组81两侧设有多组相对设置的对射传感器83。
37.本技术方案中,所述产品上料机构9包括第一物料收集弹夹91及设于所述第一物料收集弹夹91下端用于控制物料升降的上料顶升组件92。
38.本技术方案中,所述产品下料机构10包括第二物料收集弹夹101及设于所述第二物料收集弹夹101下端用于控制物料升降的下料顶升组件102。
39.本技术方案中,所述辅料翻转机构6还包括与所述翻转吸嘴64连接的翻转真空发生器65。
40.本技术方案中,所述物料吸附平台73上端中心位置处设有抽气孔,所述弯折机构7还包括与所述抽气孔连接的弯折真空发生器79。
41.本实用新型自动化程度高,加工精度和效率更高,产品加工成本低。
42.以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1