一种防爆灯照明方法、装置、存储介质及电子设备与流程
本技术涉及防爆灯,具体涉及一种防爆灯照明方法、装置、存储介质及电子设备。
背景技术:
1、防爆灯指的是用于存在有可燃性气体和粉尘等易燃易爆的危险场所,能防止内部可能产生的电弧、火花和高温引燃周围环境里的可燃性和粉尘,从而达到防爆要求的照明灯具。例如,运输石油等的船舶就属于易燃易爆的危险场所,防爆灯在这类船舶上的应用较为广泛,尤其是在船舶夜间航行时,能满足船舶的照明需求。
2、船舶在夜间航行时,为了避免能见度较低,船舶之间发生碰撞,通常采用的方式为:通过船舶上的航行灯帮助其它船舶知晓本船的航向、位置以及大小,从而进行相应的避让。但是此方式仅能为其它船舶提供大致的航向和位置信息,导致避让的精准度较低。
技术实现思路
1、为了提升避让的精准度,本技术提供一种防爆灯照明方法、装置、存储介质及电子设备。
2、在本技术的第一方面提供了一种防爆灯照明方法,具体包括:
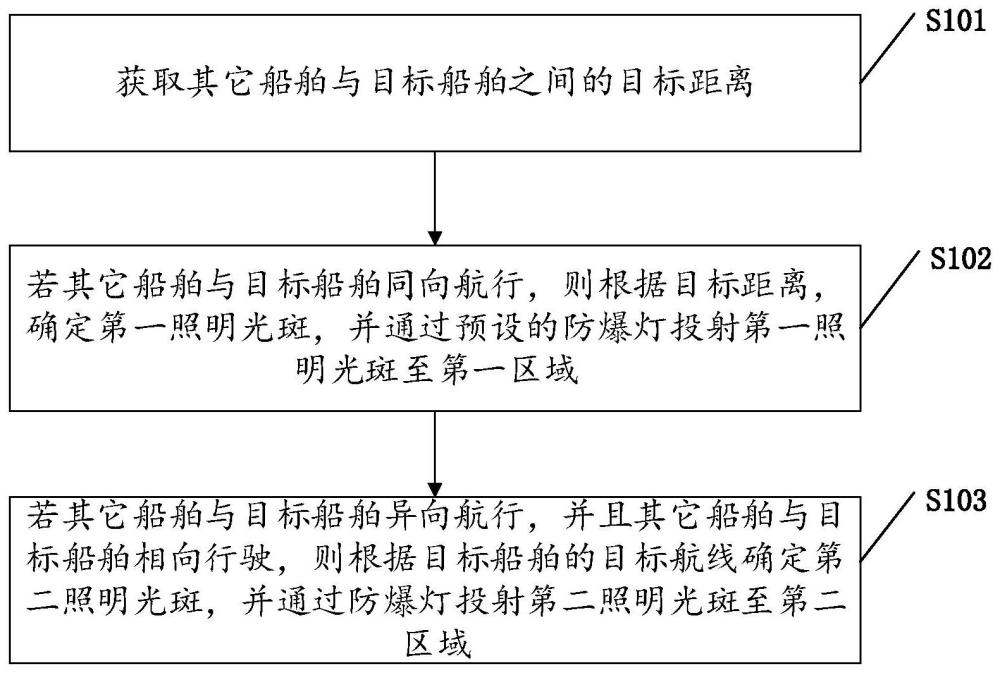
3、获取其它船舶与所述目标船舶之间的目标距离;
4、若所述其它船舶与所述目标船舶同向航行,则根据所述目标距离,确定第一照明光斑,并通过预设的防爆灯投射所述第一照明光斑至第一区域,所述第一区域为在航行方向上所述目标船舶与所述其它船舶之间的水面区域;
5、若所述其它船舶与所述目标船舶异向航行,并且所述其它船舶与所述目标船舶相向行驶,则根据所述目标船舶的目标航线确定第二照明光斑,并通过所述防爆灯投射所述第二照明光斑至第二区域,第二区域为所述目标船舶的正前方的水面区域。
6、通过采用上述技术方案,水面上存在其它船舶时,如果其它船舶与目标船舶是同向航行,存在追尾的风险,那么根据其它船舶与目标船舶之间的目标距离,确定范围合理的第一照明光斑,通过防爆灯投射到第一区域,即其它船舶与目标船舶前后之间的水面区域上,使得其它船舶与目标船舶之间存在合理的照明区域,有助于精准避让,防止两者发生追尾;如果其它船舶与目标船舶是同向航行,并且相向而行,两船交错时,存在船头相撞或船头与船身相撞的风险,那么将目标船舶的目标航线以第二照明光斑的形式投射到第二区域,即目标船舶的正前方的水面区域,从而使得目标船舶的驾驶人员通过水面上光斑,准确知晓目标船舶的航向,从而做出精准的避让,避免船舶之间发生碰撞。
7、可选的,所述根据所述目标距离,确定第一照明光斑,并通过预设的防爆灯投射所述第一照明光斑至第一区域,具体包括:
8、在所述目标船舶为后船的情况下,则根据所述目标距离,确定初始照明光斑和初始投射区域;
9、计算所述目标船舶的第一船速、所述其它船舶的第二船速之间的船速差值,若所述第一船速大于所述第二船速,则根据所述船速差值,增大所述初始照明光斑的长度,得到第一照明光斑;
10、将所述初始投射区域确定为第一区域,并通过预设的防爆灯投射所述第一照明光斑至所述第一区域;
11、若所述第一船速不大于所述第二船速,则将所述初始照明光斑确定为第一照明光斑,并后移所述初始投射区域,得到第一区域;
12、通过预设的防爆灯投射所述第一照明光斑至所述第一区域。
13、通过采用上述技术方案,目标船舶与其它船舶同向航行并且目标船舶为后船,第一船速大于第二船速,目标船舶与前船的其它船舶之间的目标距离会不断缩小,为保证目标船舶前方有较好地照明视野,照明视野也要随之前移。根据船速差值,增加初始照明光斑的长度,得到第一照明光斑并投射到第一区域。从而实现照明视野前移,避免速度过快照明视野未跟上。如果第一船速不大于第二船速,说明目标船舶与其它船舶前后之间的目标距离不会缩小,甚至会增大,需要避让的几率较小,那么保持初始照明光斑不变,确定为第一照明光斑,并后移初始投射区域,得到第一区域,使得照射区域更靠近目标船舶本身,进而方便驾驶人员观察前方是否有礁石等障碍物。
14、可选的,所述根据所述目标船舶的目标航线确定第二照明光斑,具体包括:
15、根据所述目标船舶的目标航线,确定照明光斑在长度方向的投射轮廓,并将所述目标船舶的宽度确定为初始投射宽度;
16、若所述目标距离小于预警距离,则根据所述目标船舶和所述其它船舶的船速之和,增大所述初始投射宽度,得到第一投射宽度;
17、根据所述投射轮廓和所述第一投射宽度,确定第二照明光斑;
18、若所述目标距离不小于所述预警距离,则在所述船速之和超过船速阈值时,根据所述船速之和与所述船速阈值的差值,增大所述初始投射宽度,得到第二投射宽度;
19、根据所述投射轮廓和所述第二投射宽度,确定第二照明光斑。
20、通过采用上述技术方案,确定投射轮廓和初始投射宽度后,在目标距离较小时,为提升照明警示效果,降低碰撞风险,根据船速之和增加初始投射宽度,得到第一投射宽度,进而确定第二照明光斑,使得其投射到第二区域上时,不仅能为其它船舶提供准确的航向信息,还能有较宽的照明警示范围;如果目标距离较大,那么根据船速之和与船速阈值的差值,增大初始投射宽度,最终确定第二照明光斑,从而提升避让的精准度。
21、可选的,所述方法还包括:
22、判断所述目标船舶与所述其它船舶是否处于船身交错状态,若是,则根据所述目标船舶与所述其它船舶的船间距,确定第三照明光斑;
23、通过备用防爆灯投射所述第三照明光斑至第三区域,所述第三区域为所述目标船舶的船身与所述其它船舶的船身之间的水面区域;
24、若所述其它船舶进入所述第三照明光斑内,则将所述第三照明光斑的颜色调整为红色,以警示所述其它船舶。
25、通过采用上述技术方案,如果目标船舶与其它船舶处于船身交错状态,说明两者在行驶过程中相互交错,可以理解为车辆之间的错车状态。接着根据船间距确定合理的第三照明光斑,通过防爆灯投射第三照明光斑到第三区域,一旦其它船舶靠近目标船舶,将第三照明光斑的颜色调整为红色,从而有效避免目标船舶与其它船舶船身侧面发送碰撞。
26、可选的,所述方法还包括:
27、在所述其它船舶与目标船舶同向航行并且所述目标船舶为前船的情况下,判断所述目标船舶与所述其它船舶是否为同一船队;
28、若所述其它船舶与所述目标船舶属于同一船队,则将通过所述防爆灯投射所述第二照明光斑至所述第一区域;
29、若所述其它船舶与所述目标船舶不属于同一船队,则通过所述防爆灯投射所述第一照明光斑至所述第一区域。
30、通过采用上述技术方案,如果其它船舶与目标船舶属于同一船队,优先将目标航线以第二照明光斑的形式投射到其它船舶与目标船舶前后之间区域,从而使得减少其它船舶的偏航风险,紧跟前船的目标船舶,避免从船队中掉队。同时还能为后船的其它船舶做进一步照明;如果其它船舶与目标船舶不属于同一船队,优先将第一照明光斑投射到第一区域,提供避免前后船舶追尾的照明警示。
31、可选的,所述方法还包括:
32、通过浮子传感器获取水面波动值,若所述水面波动值超过波动阈值,则通过预设的全息投影无人机将所述第一照明光斑对应的第一立体化图案投射至所述第一区域的正上方;或
33、通过预设的全息投影无人机将所述第二照明光斑对应的第二立体化图案投射至所述第二区域的正上方;或
34、通过预设的全息投影无人机将所述第三照明光斑对应的第三立体化图案投射至所述第三区域的正上方。
35、通过采用上述技术方案,水面波动值超过波动阈值,说明当前水面波动幅度较大,会影响投射到水面上的照明光斑的完整性以及可见度,那么通过全息投影无人机将对应照明光斑的立体化图案投射到水面相应区域的正上方,从而使得即使照明光斑受影响,依旧能保证其它船舶进行精准避让。
36、可选的,所述通过浮子传感器获取水面波动值,若所述水面波动值超过波动阈值之后,还包括:
37、在所述目标船舶的航向延长线与所述其它船舶的航向延长线相交时,统计所述其它船舶的航向保持不变的持续时长;
38、若所述持续时长超过时长阈值,则通过所述全息投影无人机投射目标立体图案至所述其它船舶正前方的水面上空区域,所述目标立体图案为远离所述目标船舶的方向指引图案。
39、通过采用上述技术方案,如果持续时长超过时长阈值,说明其它船舶较长时间为改变航向,那么通过全息投影无人机投影远离目标船舶的方向指引图案到其它船舶正前方的水面上空区域,从而使得其它船舶驾驶人员容易观察到方向指引,及时调整航向进行精准避让,避免发生碰撞。
40、在本技术的第二方面提供了一种防爆灯照明装置,具体包括:
41、距离获取模块(11),用于获取其它船舶与所述目标船舶之间的目标距离;
42、第一投射模块(12),用于若所述其它船舶与所述目标船舶同向航行,则根据所述目标距离,确定第一照明光斑,并通过预设的防爆灯投射所述第一照明光斑至第一区域,所述第一区域为在航行方向上所述目标船舶与所述其它船舶之间的水面区域;
43、第二投射模块(13),用于若所述其它船舶与所述目标船舶异向航行,并且所述其它船舶与所述目标船舶相向行驶,则根据所述目标船舶的目标航线确定第二照明光斑,并通过所述防爆灯投射所述第二照明光斑至第二区域,第二区域为所述目标船舶的正前方的水面区域。
44、通过采用上述技术方案,距离获取模块获取到目标距离后,接着第一投射模块在其它船舶与目标船舶同向航行时,确定第一照明光斑,并通过防爆灯将第一照明光斑投射到第一区域,最后由第二投射模块在其它船舶与目标船舶异向航行并相向行驶时,确定第二照明光斑并通过防爆灯投射到第二区域上,从而使得其它船舶与目标船舶避让的精准度得到提升。
45、综上所述,本技术包括以下至少一种有益技术效果:
46、水面上存在其它船舶时,如果其它船舶与目标船舶是同向航行,存在追尾的风险,那么根据其它船舶与目标船舶之间的目标距离,确定范围合理的第一照明光斑,通过防爆灯投射到第一区域,即其它船舶与目标船舶前后之间的水面区域上,使得其它船舶与目标船舶之间存在合理的照明区域,有助于精准避让,防止两者发生追尾;如果其它船舶与目标船舶是同向航行,并且相向而行,两船交错时,存在船头相撞或船头与船身相撞的风险,那么将目标船舶的目标航线以第二照明光斑的形式投射到第二区域,即目标船舶的正前方的水面区域,从而使得目标船舶的驾驶人员通过水面上光斑,准确知晓目标船舶的航向,从而做出精准的避让,避免船舶之间发生碰撞。
- 还没有人留言评论。精彩留言会获得点赞!