一种基于智能射灯的人体行为识别方法和系统与流程
本发明涉及智能家居的,尤其涉及一种基于智能射灯的人体行为识别方法和系统。
背景技术:
1、随着智能射灯在环境照明领域的广泛应用,对于实现智能、人性化的照明调节需求日益增长。然而,在目前已知的技术中存在一些不足之处,这些技术在人体行为识别和光照调节方面尚有改进空间。传统的环境照明方法主要基于时间控制或手动设置,无法动态适应环境中人体行为的变化,这导致了传统方法无法实时调整照明参数,从而无法提供用户期望的照明效果,降低了用户体验。一些方法对于复杂场景和多样化的人体行为识别精度较低,容易受到光照、阴影和姿态变化的影响。部分方法无法实时地对人体行为进行识别,限制了其在动态环境中的应用。目前的智能照明系统往往局限于特定的照明参数调节,缺乏对环境中人体行为的深度理解,这导致了照明系统在提供用户期望光照效果方面的不足。
技术实现思路
1、有鉴于此,本发明提供一种基于智能射灯的人体行为识别方法,目的在于提供一种基于智能射灯的人体行为识别方法,该方法可以实时感知环境中的人体行为,从而动态调整照明参数,以满足用户对照明效果的个性化需求。
2、实现上述目的,本发明提供的一种基于智能射灯的人体行为识别方法,包括以下步骤:
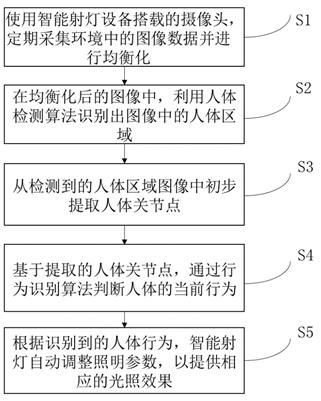
3、s1:使用智能射灯设备搭载的摄像头,定期采集环境中的图像数据并进行均衡化;
4、s2:在均衡化后的图像中,利用人体检测算法识别出图像中的人体区域;
5、s3:从检测到的人体区域图像中初步提取人体关节点;
6、s4:基于提取的人体关节点,通过行为识别算法判断人体的当前行为;
7、s5:根据识别到的人体行为,智能射灯自动调整照明参数,以提供相应的光照效果;
8、作为本发明的进一步改进方法:
9、可选地,所述s1步骤中使用智能射灯设备搭载的摄像头,定期采集环境中的图像数据并进行均衡化,包括:
10、s11:计算图像的直方图:
11、直方图表示图像中每个灰度级别的像素数量,灰度级别的直方图的计算方式为:
12、;
13、其中,,,和分别表示图像的长度和宽度,表示图像于像素位置处的像素值;,表示灰度级别的最大值;的计算方式为:;
14、s12:计算累积分布函数:
15、累积分布函数表示直方图中灰度级别的累积分布,对于灰度级别的直方图的累积分布,其计算公式为:
16、;
17、其中,;是灰度级别的概率密度,即
18、;
19、s13:直方图均衡化:
20、均衡化后的图像灰度级别由累积分布函数进行调整,计算公式如下:
21、;
22、其中,表示均衡化后的图像于像素位置处的像素值;表示直方图均衡化分割点,分割点基于最大化分割熵获得;为灰度级别为的累积分布;为灰度级别为的累积分布;函数将结果四舍五入为整数。
23、可选地,所述s2步骤中在均衡化后的图像中,利用人体检测算法识别出图像中的人体区域,包括:
24、基于yolo目标检测网络,将均衡化后的图像分成网格,并在每个网格上预测人体边界框:
25、s21:人体检测置信度计算:
26、在yolo目标检测网络中,每个网格单元预测一个人体边界框,并为每个边界框提供置信度得分,置信度公式为:
27、;
28、其中,是网格的索引;是给定均衡化后的图像,网格中存在人体的概率,由yolo目标检测网络预测得到;
29、s22:边界框坐标预测:
30、yolo目标检测网络预测的人体边界框包含中心坐标、长度、宽度,通过以下公式计算:
31、;
32、其中,表示sigmoid函数;,,和由yolo目标检测网络预测获取;和是网格单元的中心坐标;
33、s23:损失函数计算:
34、yolo目标检测网络的损失函数包括定位误差和目标置信度误差,损失函数的计算方法为:
35、;
36、其中,和是损失函数中的权重;,和分别是实际人体边界框的中心坐标、长度和宽度,和分别是人体存在和人体不存在的指示函数;是实际人体边界框的置信度。
37、可选地,所述s3步骤中从检测到的人体区域图像中初步提取人体关节点,包括:
38、s31:边缘检测:
39、计算人体区域图像的梯度幅度,计算方式为:
40、;
41、其中,表示人体区域图像像素位置;为像素位置处的梯度幅度;为人体区域图像位置处的值;为人体区域图像位置处的值;为人体区域图像位置处的值;为像素位置处的横向梯度幅度;为像素位置处的纵向梯度幅度;
42、基于梯度幅度计算边缘图:
43、;
44、其中,为边缘图位置处的值;
45、s32:角点检测:
46、计算梯度幅度的自相关矩阵:
47、;
48、其中,表示自然常数;表示以为中心范围内的坐标;为中的元素;为自相关矩阵位置处的值;为像素位置处的横向梯度幅度;为像素位置处的纵向梯度幅度;
49、基于自相关矩阵计算角点响应:
50、;
51、其中,表示矩阵的行列式;表示矩阵的迹;为角点响应位置处的值;
52、角点图的计算方式为:
53、;
54、其中,为角点图位置处的值;
55、s33:基于形态学操作提取人体关节点;
56、提取人体关节特征的计算公式为:
57、;
58、其中,表示交集操作;和分别代表膨胀和腐蚀操作;为人体关节特征处的值。
59、可选地,所述s4步骤中基于提取的人体关节点,通过行为识别算法判断人体的当前行为,包括:
60、s41:特征提取:
61、提取相邻关节点之间的距离特征与角度特征:
62、;
63、;
64、其中,和表示相邻关节点序号;和分别表示关节点的横纵坐标;和分别表示关节序号为和的关节的横坐标;和分别表示关节序号为和的关节的纵坐标;表示反正切函数;表示关节序号为和的关节的距离;表示关节序号为和的关节的角度;
65、s42:行为分类器:
66、将人体区域图像和s41中提取出的特征输入至训练好的行为识别网络进行分类:
67、;
68、其中,代表行为识别网络;表示人体行为分类结果;和分别代表标准化为均值为0,标准差为1的距离特征和角度特征。
69、可选地,所述s5步骤中根据识别到的人体行为,智能射灯自动调整照明参数,以提供相应的光照效果,包括:
70、考虑人体行为在智能射灯照明度的影响,智能射灯照明度的计算公式为:
71、;
72、其中,表示射灯的默认照明度;表示人体行为调整因子;表示人体与智能射灯的连线和地面垂直方向的夹角;表示人体与智能射灯之间的距离;
73、根据计算出的照度调整射灯的光照强度从而提供相应的光照效果。
74、本发明还公开了一种基于智能射灯的人体行为识别系统,包括:
75、图像采集模块:使用智能射灯设备搭载的摄像头,定期采集环境中的图像数据并进行均衡化;
76、人体识别模块:利用人体检测算法识别出图像中的人体区域;
77、人体关节点提取模块:从检测到的人体区域图像中初步提取人体关节点;
78、人体行为判断模块:基于提取的人体关节点,通过行为识别算法判断人体的当前行为;
79、照明调整模块:根据识别到的人体行为,智能射灯自动调整照明参数,以提供相应的光照效果;
80、有益效果
81、本发明利用搭载在智能射灯设备上的摄像头,通过使用高效的人体检测算法,能够准确地识别环境中的人体位置。采用先进的检测算法,可以应对复杂的场景、不同光照条件以及多人存在的情况,提高了检测的准确性和稳定性。
82、在检测到的人体区域图像中,本发明采用人体关节点提取算法。这种算法能够从人体图像中准确提取关键的身体部位信息,为后续的行为识别提供了丰富的数据。
83、本发明基于提取的人体关节点,采用高效的行为识别算法。这种算法能够快速而准确地判断人体的当前行为,包括静止、行走、举手等多种行为。通过使用行为识别算法,提高了系统对人体行为的理解能力。
84、本发明通过使用实时反馈和调整机制,能够实时调整照明参数。采用先进的控制算法,根据识别到的人体行为,动态地调整智能射灯的照度,以提供更合适的光照效果。
85、本发明将人体检测、关节点提取和行为识别等多个算法有机地整合在一起,形成一个综合性的智能照明系统。这种整合效果使得系统更全面地理解环境中的人体信息,从而提供更个性化、智能化的照明服务。
- 还没有人留言评论。精彩留言会获得点赞!