基于仿生柔顺机构的转移系统及飞行刺晶柔顺控制方法
本发明涉及芯片转移的,更具体地,涉及一种基于仿生柔顺机构的转移系统及飞行刺晶柔顺控制方法。
背景技术:
1、作为新一代显示技术,mini led显示屏具有良好的对比度与分辨率。其中,miniled芯片封装是关键环节。机械式mini led芯片固晶设备通过顶针刺晶的方式,能够将miniled芯片从生长基板转移至电路基板。而其中针刺机构及其控制器性能,决定mini led芯片转移的性能指标。为使针刺机构与mini led芯片之间能够准确定位,现有技术中通过使用仿生柔顺机构,通过生物力学机理,能够提升机构本身的性能指标,提高作业效率。然而针对飞行刺晶的驱动部分,仍具有迟滞、蠕变等非线性特性影响定位精度,mini led芯片巨量转移的一致性及良率仍然无法得到进一步提升。
技术实现思路
1、本发明的目的在于克服现有技术中mini led芯片巨量转移仍具有定位误差的不足,提供一种基于仿生柔顺机构的转移系统及飞行刺晶柔顺控制方法,能够有效消除迟滞效应、蠕变的问题,提高mini led芯片巨量转移的定位精度,提高作业效率。
2、为解决上述技术问题,本发明采用的技术方案是:
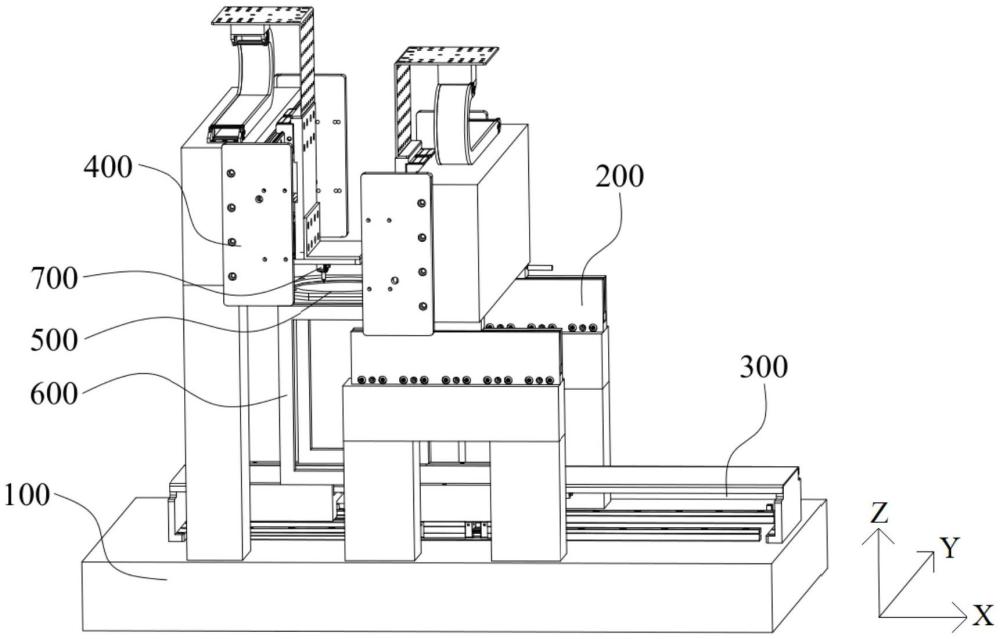
3、提供一种基于仿生柔顺机构的转移系统,包括底座和安装于所述底座上的二维移动装置、第一x向移动装置、第一y向移动装置,所述二维移动装置的移动端用于安装miniled晶圆,所述第一x向移动装置的移动端设有承载结构,所述第一y向移动装置的移动端设有二维柔顺飞行刺晶装置;其中,所述二维柔顺飞行刺晶装置包括仿生柔顺机构、与所述仿生柔顺机构相连接的刺晶机构、与所述仿生柔顺机构驱动连接的飞行驱动机构,所述仿生柔顺机构具有y向和z向的运动自由度,所述仿生柔顺机构上设有飞行位移传感件,所述刺晶机构上设有力传感件;还包括与所述二维移动装置、第一x向移动装置、第一y向移动装置、刺晶机构、飞行驱动机构、飞行位移传感件、力传感件均通信连接的控制装置。
4、本发明提供一种基于仿生柔顺机构的转移系统,第一x向移动装置用于驱动承载结构沿x向往复运动,第一y向移动装置用于驱动二维柔顺飞行刺晶装置沿y向往复运动,二维移动装置用于驱动mini led晶圆沿x向以及y向往复运动;其中,仿生柔顺机构的z向运动自由度用于将mini led晶圆通过刺晶机构转移至承载结构,并能够通过力传感件实时监测mini led晶圆与刺晶机构之间的接触力,力传感件用于使接触力维持在预设阈值范围内;仿生柔顺机构的y向运动自由度用于补偿y向运动的位移差,并能够通过飞行位移传感件实时监测仿生柔顺机构的y向运动位移,使刺晶机构与承载结构保持相对静止,实现mini led晶圆的对位。
5、进一步地,所述飞行驱动机构包括压电陶瓷、桥式放大机构,所述桥式放大机构的输入端与所述压电陶瓷相连接,所述桥式放大机构的输出端与所述仿生柔顺机构相连接;所述压电陶瓷通过压电驱动器与所述控制装置通信连接。
6、进一步地,所述第一y向移动装置包括龙门座,所述龙门座上连接有第一y向导轨、第一y向直线电机、第一y向位移传感件,所述第一y向导轨上滑动连接有第一滑板,所述第一y向直线电机的驱动端与所述第一滑板相连接,所述飞行驱动机构的固定端与所述第一滑板相连接;所述第一y向直线电机、第一y向位移传感件均与所述控制装置通信连接。
7、进一步地,所述二维移动装置包括第二y向移动装置、第二x向移动装置,所述第二y向移动装置通过所述第二x向移动装置与所述底座相连接;其中,所述第二y向移动装置的移动端用于安装所述mini led晶圆;所述第二x向移动装置包括位于所述第一x向移动装置两侧的第一安装座,所述第一安装座与所述底座相连接,所述第一安装座上装设有第二x向直线电机、第二x向位移传感件,所述第二x向直线电机的驱动端与所述第二y向移动装置的固定端相连接,所述第二x向直线电机、第二x向位移传感件、第二y向移动装置均与所述控制装置通信连接。
8、进一步地,所述控制装置包括上位机、与所述上位机通信连接的工控机,还包括与所述工控机通信连接的数模转化电路板和模数转化电路板;所述二维移动装置、第一x向移动装置、第一y向移动装置均与所述工控机通信连接,所述飞行驱动机构与所述数模转化电路板通信连接,所述飞行位移传感件、力传感件均与所述模数转化电路板通信连接。
9、本发明还提供一种基于仿生柔顺机构的转移系统的飞行刺晶柔顺控制方法,当所述二维柔顺飞行刺晶装置将所述mini led晶圆转移至所述承载结构时:
10、所述控制装置采取开环前馈控制以及接触力半闭环伺服柔顺控制来对所述仿生柔顺机构的z向运动进行控制:所述力传感件实时监测所述mini led晶圆与所述刺晶机构之间的接触力,当二者之间的接触力大于预设阈值范围时,降低所述仿生柔顺机构的z向运动速度,直至所述mini led晶圆与所述刺晶机构之间的接触力恢复至预设阈值范围内;
11、所述控制装置采取双闭环高带宽控制来对所述仿生柔顺机构的y向运动进行控制:设所述第一y向移动装置的y向运动速度为v1、所述二维移动装置的y向运动速度为v2、所述仿生柔顺机构的y向运动速度为v3;所述飞行位移传感件实时监测所述仿生柔顺机构的y向运动位移,并使y向运动速度满足:v1+v3=v2。
12、本发明还提供一种基于仿生柔顺机构的转移系统的飞行刺晶柔顺控制方法,在仿生柔顺机构的z向运动中,通过开环前馈控制能够解决迟滞非线性问题导致的刺晶定位精度差的问题,并通过实时监测mini led晶圆与刺晶机构之间的接触力,能够提高mini led晶圆巨量转移的一致性;在仿生柔顺机构的z向运动中,通过双闭环高带宽控制,能够消除转移系统的稳态误差,提高刺晶机构与mini led晶圆对位的精度。
13、进一步地,所述双闭环高带宽控制包括具有正位置反馈控制的内环控制,还包括具有积分控制的外环控制;其中,所述双闭环高带宽控制的传递函数为:
14、
15、所述内环控制的传递函数为:
16、
17、所述积分控制的数学模型为:
18、
19、式中,g(s)表示所述仿生柔顺机构的传递函数,cp(s)表示所述正位置反馈控制的数学模型,ki表示积分系数,s表示拉普拉斯变换中的复变量。
20、进一步地,所述正位置反馈控制的数学模型为:
21、
22、式中,kp表示正位置反馈控制的增益,ωp表示正位置反馈控制的固有频率,s表示拉普拉斯变换中的复变量,ηp表示正位置反馈控制的阻尼比。
23、进一步地,所述仿生柔顺机构的传递函数为:
24、
25、式中,k表示低频增益系数,ωn表示所述仿生柔顺机构的一阶固有频率,s表示拉普拉斯变换中的复变量,ξ表示所述仿生柔顺机构的阻尼比。
26、进一步地,所述开环前馈控制的开环前馈函数的获取方式为:通过开环测试实验获得所述飞行驱动机构的压电陶瓷的迟滞环,并按照迟滞算子的数学模型拟合所述迟滞环获得所述压电陶瓷的迟滞数学模型,然后对所述迟滞数学模型求解其逆模型得到开环前馈函数。
27、与现有技术相比,本发明的有益效果是:
28、本发明为一种基于仿生柔顺机构的转移系统及飞行刺晶柔顺控制方法,转移系统的仿生柔顺机构的z向运动自由度用于将mini led晶圆通过刺晶机构转移至承载结构,仿生柔顺机构的y向运动自由度用于补偿y向运动的位移差,使刺晶机构与承载结构保持相对静止,实现mini led晶圆的对位;其中,在仿生柔顺机构的z向运动中,通过开环前馈控制能够解决迟滞非线性问题导致的刺晶定位精度差的问题,并通过实时监测mini led晶圆与刺晶机构之间的接触力,能够提高mini led晶圆巨量转移的一致性;在仿生柔顺机构的z向运动中,通过双闭环高带宽控制,能够消除转移系统的稳态误差,提高刺晶机构与mini led晶圆对位的精度。
- 还没有人留言评论。精彩留言会获得点赞!