船舶安全远程访问系统及方法与流程
1.本发明涉及船舶(例如无人操纵船舶,如远程控制船舶和自主船舶)上的操作系统的维护。本发明还涉及控制对这样的船舶上的维护网络的远程访问。
背景技术:
2.远程的和自主的船运被许多人视为海运业(特别是货运)的未来。远程操作船只和自主船只的共同点在于,当船只在海上时,船只在长时间段期间可以是无人操纵的,这进而可以减少人为错误并显著地降低成本,因为住处和甲板室可以被移除。
3.远程操作的船只通过通信接口从远程控制中心进行手动操作,通信接口例如卫星通信系统,用于确保在整个航行期间有足够的地理覆盖,以及基于陆地的通信网络,用于在港口和陆地附近的较高带宽和较低等待时间通信。
4.根据最高自主水平的严格定义,针对完全自主的船只,应当不需要远程控制。然而,在现实生活中,船只的操作可以被细分成子任务,子任务可以具有不同程度的自主性,并且具有最小程度的自主性的子任务通常将需要更多带宽。子任务的自主程度通常将随时间而变化,这取决于船舶的状态或正在执行的任务。因此,仍然需要通信接口,用于例如船只的实时监督和维护、用于系泊、用于一些航段的路线调整和船只控制,以及作为备用策略的一部分。
5.船舶具有一个或更多个船舶操作系统。这样的操作系统可以涉及推进、转向、动力管理。现代船舶通常具有动态定位(dp)系统、推进器控制系统和舵控制系统。此外,自主船舶可以具有与一个或更多个传统系统通信的情境感知系统和自主导航系统。
6.为了控制这些操作系统,通常在操作系统与控制站之间部署控制网络。在船只上,这通常是总线网络。针对远程操作的船只和自主操作的船只,该控制站是远程的、在岸上的。
7.还存在维护网络,其可以与控制网络类型相同,但是到操作系统的维护接口通常不同于控制接口。维护接口可以经由维护网络访问,其中,服务工程师可以访问系统的较低级功能。
8.通常,通过允许授权的服务工程师访问船舶并经由维护网络连接至控制系统,由船舶上的服务工程师来执行船舶的维护。这可以包括例如故障查找、固件/软件升级和配置改变。然而,当船只在海上时,有时希望例如从岸边的维护系统进行至少一些维护操作。
9.允许外部访问船舶上的维护网络的结果是,它会造成相当大的安全风险,并且如果维护网络落入意图控制船只以及甚至借助于船只来执行恶意动作的未授权人员手中,结果可能是灾难性的。
10.尽管可能较不严重,但以下的结果可能是类似的:如果由授权维护人员在维护计划或维护窗口之外对船只执行维护,维护计划或维护窗口由负责船只控制的负责人例如岸上的船长来确定。
11.因此,考虑到所有这些情况,需要控制对船舶维护网络的访问。
技术实现要素:
12.解决上述问题的本发明是根据独立权利要求的一种船舶安全远程访问系统以及一种用于控制对船舶上的维护网络的远程访问的方法。
13.本发明的效果是,可以本地地和远程地对船舶操作系统执行维护,并且可以从船舶和岸边控制远程访问,其中,当船舶由授权人员操纵时,控制的优先权被给予船舶。
附图说明
14.图1以简化框图示出了包括船舶访问装置(2)的船舶安全远程访问系统(1)的实施方式,该船舶访问装置(2)包括布置在船舶(10)上的维护访问装置(11)和远程控制开关(12)。维护访问装置(11)可以从用于允许远程访问船舶操作系统(13)的远程控制开关(12)启用和禁用。
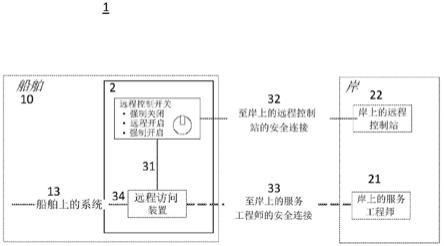
15.图2以框图示出了船舶安全远程访问系统(1)的实施方式,其包括与图1中相同的船舶(10)上的船舶访问装置(2)。另外,其包括与船舶访问装置(2)功能相同的岸上访问装置(3)。与船舶维护访问装置(11)相同的岸上维护访问装置可以从与船舶上的远程控制开关(12)相同的岸上远程控制开关来启用和禁用,所述岸上远程控制开关用于允许从岸上服务站(未示出)到岸上操作系统(未示出)的远程访问。
16.图3示出了船舶安全远程访问系统(1)的远程控制开关(12)的实施方式。
具体实施方式
17.在以下描述中,阐述了本发明的各种示例和实施方式,以便为技术人员提供对本发明的更透彻理解。在各种实施方式的上下文中并且参照附图描述的具体细节不旨在被解释为限制性的。确切地说,本发明的范围由所附权利要求限定。
18.对下面描述的实施方式进行编号。此外,描述了关于编号的实施方式限定的从属或相关实施方式。除非另有说明,否则可以与一个或更多个被编号的实施方式组合的任何实施方式也可以直接与所提及的被编号的实施方式的任何相关实施方式组合。
19.参照图1,本发明在第一实施方式中是船舶安全远程访问系统(1),其包括布置在船舶(10)上的维护访问装置(11)。维护访问装置(11)被配置成经由第一安全链路(33)连接至远程服务站(21)。维护访问装置(11)还被配置成连接至船舶操作系统(13),使得远程服务站(21)可以对船舶操作系统(13)执行维护任务。这要求启用维护访问装置(11),从而允许访问维护网络和船舶操作系统。在禁用状态下,维护访问装置(11)阻止访问船舶操作系统。
20.从维护访问装置(11)到船舶操作系统的连接通常将经由船舶上的维护网络,该维护网络与同一船只上的其他网络隔离。
21.船舶安全远程访问系统(1)还包括布置在船舶(10)上的远程控制开关(12)。远程控制开关(12)被配置成经由第二安全链路(32)连接至远程控制站(22)。
22.远程控制站(22)在船舶的外部,通常位于岸上,在岸上可以监督和控制成队的船舶。
23.不同类型的远程控制站可以连接至船舶。例如,用于自身任务的监督和控制(例如与货运有关的路径和物流的控制)的远程控制站。这可以是船运公司的控制中心。可以为另
一个控制中心分配管理船舶健康的角色。这可以是船厂的控制中心,所述船厂管理着他们为不同船运公司提供的成队的船只。当然,它也可以是单个控制中心或具有类似角色(例如,在船舶是远程操作或自主的情况下,具有岸上船长)的分布式控制中心。
24.远程控制开关(12)连接至船舶维护访问装置(11),并且被配置成基于来自远程控制站(22)的命令启用或禁用维护访问装置(11)。
25.可以在船舶上对控制开关(12)进行手动操作。
26.在相关实施方式中,船舶安全远程访问系统(1)包括如图3中所示的控制器(123),图3示出了远程控制开关(12)的实施方式的更多细节。控制器可以在物理上位于远程控制开关(12)的内部或者被布置在远程控制开关(12)的外部。
27.在可以与上述第一实施方式结合的实施方式中,远程控制开关(12)是具有信号极(pole)(121)的手动选择器开关,该信号极(121)包括强制远程关闭状态(121a),在该强制远程关闭状态(121a)下,维护访问装置(11)被禁用,并且另外,远程控制站(22)被禁止启用船舶维护访问装置(11)。
28.在第一相关实施方式中,信号极(121)包括远程开启状态(121b),在远程开启状态(121b)下,远程控制站(22)被启用以启用和禁用船舶维护访问装置(11)。
29.在可以与第一相关实施方式组合的第二相关实施方式中,信号极(121)包括强制远程开启状态(121c),在强制远程开启状态(121c)下,船舶维护访问装置被启用,并且远程控制站被禁止禁用船舶维护访问装置。
30.在可以与上述任何实施方式组合的第三实施方式中,远程控制开关(12)的状态之间的切换是硬件驱动的。本上下文中的硬件驱动意味着,远程控制开关(12)和远程访问装置(11)是(可选地物理集成的)硬件元件,并且远程控制开关(12)连接至远程访问装置(11),使得:可以从远程控制开关(12)禁用和启用远程访问装置(11),而无需使用在处理器上运行的软件。因此,切换需要物理访问远程控制开关(12),从而降低了意外或有意篡改的可能性,并且降低了访问船舶上的操作系统(13)的后端的可能性。
31.在可以与上述任何实施方式组合的第四实施方式中,远程控制开关(12)包括具有第一状态、第二状态和第三状态(122a、122b、122c)的验证极(122),其中,信号极和验证极(121、122)的状态之间的切换是同步的,并且验证极(122)的状态被布置成用于指示远程控制开关(12)的当前状态。
32.在相关实施方式中,控制器(123)与信号极和验证极(121、122)进行通信。
33.在图3中,虚线指示信号极和验证极(121、122)的状态之间的切换是同步的。例如,当信号极(121)处于强制远程关闭状态(121a)时,验证极(122)处于第一状态(122a),当信号极(121)处于远程开启状态(121b)时,验证极(122)处于第二状态(122b),并且当信号极(121)处于强制远程开启状态(121c)时,验证极(122)处于第三状态(122c)。
34.第一状态、第二状态和第三状态(122a、122b、122c)中的每一个可以分别连接至控制器(123)上的对应的第一验证输入、第二验证输入和第三验证输入(123d、123e、123f),并且控制器具有可以连接至验证极(122)的公共连接器(122d)的验证输出信号(123c)。在这种情况下,如果控制器检测到在第一验证输入、第二验证输入和第三验证输入(123d、123e、123f)中的一个上检测到与验证输出信号(123c)相同的信号,以及可选地同时检测到在其他两个验证输入上不存在该信号,则可以经由第二安全链路(32)将远程控制开关(12)状态
的实际状态发送回远程控制站(22)。
35.在相关实施方式中,信号极和验证极(121、122)布置在不同的甲板中,并且远程控制开关可以是例如2p3t旋转开关。
36.在相关实施方式中,控制器(123)被布置成用于通过将验证极(122)的状态与来自第一极(121)的输出信号(31)进行比较来验证控制开关(12)的当前状态。
37.控制器(123)可以包括连接至第一极(121)的公共极(121d)的第一极监测输入(123b)。如果来自第一极(121)的输出信号(31)被启用,则控制器将在第一极监测输入(123b)上检测到启用信号(例如24v),并且相反地,如果输出信号(31)是禁用信号,则控制器将在第一极监测输入(123b)上检测到禁用信号。由于输出信号(31)在远程控制开关(12)处于强制远程关闭状态(121a)时应当总是被禁用并且在远程控制开关(12)处于强制远程开启状态(121c)时应当总是被启用,所以通过将这些值与控制器(123)中的第一验证输入、第二验证输入和第三验证输入(123d、123e、123f)上的值进行比较,可以验证开关的正确操作。
38.在第五实施方式中,本发明是一种用于控制对船舶上的维护网络的远程访问的方法,包括在船舶上本地地在以下状态之间切换;
39.‑
远程开启状态,在远程开启状态下,启用远程控制站以启用或禁用对维护网络的远程访问,
40.‑
强制关闭状态,在强制关闭状态下,禁用对维护网络的远程访问,并且禁止远程控制站启用对维护网络的远程访问,
41.‑
强制开启状态,在强制开启状态下,启用对维护网络的远程访问,并且禁止远程控制站禁用对维护网络的远程访问。
42.在第一相关实施方式中,切换是硬件驱动的。
43.在可以与以上方法和第一相关实施方式组合的第二相关实施方式中,船舶包括根据以上任何实施方式的船舶安全远程访问系统(1),其中,远程控制开关(12)被配置成用于在状态之间切换。
44.只要已经预先定义了什么编码了启用状态和禁用状态,装置之间的信号的具体类型就不重要。例如,用作启用信号的信号可以具有正电压,例如24v dc,并且禁用信号可以具有零电压,0v。然而,也可以使用其他dc和ac电压以及编码信号。
45.如图3所示的远程关闭状态(121a)例如可以由0v或终止来表示。当远程开关(12)的信号极(121)处于该定位时,馈送至维护访问装置(11)的0v输出信号(31)向维护访问装置(11)指示它应当在禁用状态下操作。这意味着,远程服务站(21)和船舶上的维护网络(34)之间的连接被断开,并且不能被远程改变。
46.此外,当远程开关(12)的信号极(121)处于远程开启状态(121b)时,来自控制器(123)的信号(123a)确定输出信号(31)。如果例如来自控制器的信号(123a)是24v,则输出信号(31)也将是24v,这被船舶维护访问装置(11)视为启用状态。另一方面,如果例如来自控制器的信号是0v,这将使船舶维护访问装置(11)禁用。由于控制器(123)经由安全链路(32)连接至远程控制站(22),因此远程控制站可以给予或拒绝对管理网络(34)的远程访问以及对船舶上的系统的远程维护。
47.当远程开关(12)的信号极(121)处于强制远程开启状态(121c)时,维护访问装置
(11)被持续启用,并且可以独立于来自远程控制站(22)的命令从远程服务站(21)执行维护。
48.在岸(50)侧,还可以存在远程控制船只或自主船只的操作所需的多个服务器和后端系统。为了提供船舶的安全航行,因此同样重要的是,保持对用于维护这些基于陆地的操作系统的访问的控制。在可以与上述任何实施方式结合的实施方式中,船舶安全远程访问系统(1)包括布置在岸(50)上的岸上访问装置(3),如图2所示。基于陆地的操作系统在附图中未示出,但将通过与船舶维护访问装置(11)类似的岸上维护访问装置来访问。除了岸上访问装置(3)是基于陆地的之外,岸上访问装置(3)还可以类似于船舶访问装置(2)的任何实施方式。
49.在示例性实施方式中,各种特征和细节以组合方式示出。关于特定示例描述了若干特征的事实不应被解释为暗示这些特征必须一起包括在本发明的所有实施方式中。相反,参照不同实施方式描述的特征不应被解释为相互排斥的。如本领域技术人员将容易理解的,发明人已经设想了并入本文所述的特征的任何子集并且不是明确地相互依赖的实施方式,并且这些实施方式是预期公开内容的一部分。然而,所有这些实施方式的明确描述将不会有助于理解本发明的原理,因此为了简单或简洁起见,已经省略了特征的一些排列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1