图像读取装置、图像读取装置的控制装置的制作方法
1.本发明涉及一种图像读取装置、图像读取装置的控制装置。
背景技术:
2.专利文献1(日本专利特开2012-222764号公报)中公开了一种图像处理装置,其包括:光学传感器,用于判定被置于自动原稿送给装置的托盘上的原稿的尺寸;以及扫描仪部,利用电荷耦合器件(charge coupled device,ccd)来读取从托盘搬送而来的原稿的图像。而且,所述专利文献1中公开了:当基于光学传感器的探测结果而判断为所探测出的原稿的尺寸不正确的情况下,进行敦促用户设定适当的尺寸的显示。
技术实现要素:
3.[发明所要解决的问题]
[0004]
在采用对于对沿着第二扫描方向搬送的原稿进行读取而获得的读取图像数据,遍及第一扫描方向的整个区域来进行原稿的端部检测的结构时,有时会将因灰尘等而包含在读取图像数据中的条纹(黑线)检测为原稿的端部。
[0005]
本发明的目的在于,与采用遍及第一扫描方向的整个区域来对读取图像数据进行原稿的端部检测的结构的情况相比,抑制原稿在第一扫描方向上的端部位置的误检测。
[0006]
[解决问题的技术手段]
[0007]
本发明是一种图像读取装置,包括:读取部件,读取沿着第二扫描方向受到搬送的原稿;检测部件,检测与所述第二扫描方向交叉的第一扫描方向上的所述原稿的端部位置;设定部件,对包含所述检测部件所检测出的所述端部位置的、所述第一扫描方向的端部的搜寻范围进行设定;以及搜寻部件,对于所述读取部件读取所述原稿而获得的读取图像数据,在所述设定部件所设定的所述端部的搜寻范围搜寻所述端部位置。
[0008]
本发明是一种图像读取装置,包括:搬送部件,沿着第二扫描方向来搬送被载放于原稿台的原稿;读取部件,读取沿着所述第二扫描方向受到搬送的所述原稿;选择部件,关于被载放于所述原稿台的所述原稿,从针对与所述第二扫描方向交叉的第一扫描方向的长度不同的多种原稿而预定的所述第一扫描方向的多个端部位置中,选择任一个端部位置;设定部件,对包含所述选择部件所选择的所述端部位置的、所述第一扫描方向的端部的搜寻范围进行设定;以及搜寻部件,对于所述读取部件读取所述原稿而获得的读取图像数据,在所述设定部件所设定的所述端部的搜寻范围搜寻所述端部位置。
[0009]
本发明是一种图像读取装置的控制装置,包括:检测部件,关于沿着第二扫描方向受到搬送的原稿,对与所述第二扫描方向交叉的第一扫描方向上的所述原稿的端部位置进行检测;设定部件,对包含所述检测部件所检测到的所述端部位置的、所述第一扫描方向的端部的搜寻范围进行设定;以及搜寻部件,对于对沿着所述第二扫描方向受到搬送的所述原稿进行读取而获得的读取图像数据,在所述设定部件所设定的所述端部的搜寻范围搜寻所述端部位置。
[0010]
[发明的效果]
[0011]
根据本发明,与采用遍及第一扫描方向的整个区域来对读取图像数据进行原稿的端部检测的结构的情况相比,能够抑制原稿在第一扫描方向上的端部位置的误检测。
附图说明
[0012]
图1是表示适用本发明的实施方式的图像处理系统的结构例的图。
[0013]
图2是表示图像读取装置的结构的图。
[0014]
图3是用于说明作为读取对象的原稿的结构的图。
[0015]
图4是用于说明原稿宽度传感器的安装位置的图。
[0016]
图5是用于说明被收容在原稿收容部中的原稿的尺寸及方向与原稿宽度探测传感器的接通/断开的关系的图。
[0017]
图6是用于说明控制/图像处理单元的功能结构的图。
[0018]
图7是用于说明搬送读取模式下的图像处理的流程的流程图。
[0019]
图8是用于说明所获取的原稿宽度探测结果、与暂时决定的原稿左端ml及原稿右端mr的各位置的关系的图。
[0020]
图9的(a)至图9的(f)是用于说明原稿的读取动作的具体例的图。
[0021]
[符号的说明]
[0022]
1:图像读取装置
[0023]
2:服务器装置
[0024]
3:ocr装置
[0025]
4:网络
[0026]
10:原稿送给装置
[0027]
11:原稿收容部
[0028]
12:排纸收容部
[0029]
13:导出辊
[0030]
14:梳理机构
[0031]
15:搬送路径
[0032]
16:搬送辊
[0033]
17:反射板
[0034]
18:对齐构件
[0035]
20:原稿宽度探测传感器
[0036]
21:第一传感器
[0037]
22:第二传感器
[0038]
23:第三传感器
[0039]
30:原稿长度探测传感器
[0040]
40:扫描仪装置
[0041]
48:受光部
[0042]
50:控制/图像处理单元
[0043]
51:输出目标设定部
[0044]
52:读取图像数据存储部
[0045]
53:原稿宽度决定部
[0046]
54:原稿端部决定部
[0047]
55:原稿图像数据截取部
[0048]
56:原稿图像数据存储部
[0049]
57:原稿分析数据存储部
[0050]
58:原稿图像数据修正部
[0051]
m:原稿
[0052]
l:原稿长度
[0053]
w:原稿宽度
具体实施方式
[0054]
以下,参照附图来详细说明本发明的实施方式。
[0055]
<图像处理系统>
[0056]
图1是表示适用本实施方式的图像处理系统的结构例的图。
[0057]
如图所示,所述图像处理系统是通过图像读取装置1、服务器装置2与光学字符识别(optical character recognition/reader,ocr)装置3经由网络4可相互通信地连接而构成。
[0058]
其中,图像读取装置1读取原稿的图像。而且,服务器装置2存储从图像读取装置1送来的图像数据。进而,ocr装置3基于图像读取装置1的请求,对从图像读取装置1送来的图像数据进行ocr处理,并将其结果返送给图像读取装置1。另外,服务器装置2及ocr装置3可包含具有中央处理器(central processing unit,cpu)及存储器的计算机装置。
[0059]
<图像读取装置>
[0060]
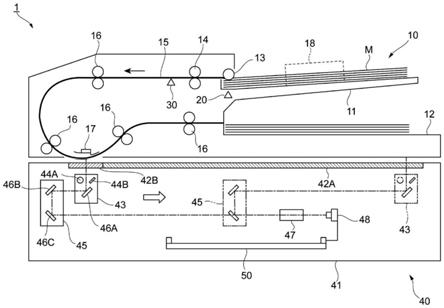
图2是表示图像读取装置1的结构的图。
[0061]
所述图像读取装置1包括:原稿送给装置10,从所载放的原稿堆依序搬送原稿m;以及扫描仪装置40,通过扫描来读取原稿的图像。
[0062]
[原稿送给装置]
[0063]
原稿送给装置10包括:原稿收容部11,载放包含多张原稿m的原稿堆;以及排纸收容部12,被设在所述原稿收容部11的下方,载放读取已结束的原稿m。而且,原稿送给装置10包括导出辊13,所述导出辊13导出原稿收容部11的原稿m并予以搬送。进而,在导出辊13的原稿搬送方向下游侧,设有逐张地梳理原稿m的梳理机构14。在搬送原稿m的搬送路径15中,设有多个(本例中为四组)搬送辊16(搬送部件的一例)。
[0064]
而且,在读取位置,设有反射板17,所述反射板17包含从图中跟前侧朝向里侧延伸的白色的板状构件,也成为通过读取位置的原稿m的背景。所述反射板17也被用作阴影(shading)修正用的白基准。
[0065]
而且,在作为原稿台的一例的原稿收容部11,设有对齐构件18,所述对齐构件18顶住收容于原稿收容部11的原稿m的宽度方向(第一扫描方向)的两端,由此来使原稿m的第一扫描方向的位置对齐。
[0066]
而且,在原稿收容部11中的原稿m的搬送方向的前端侧且成为导出辊13的下方的
部位,设有原稿宽度探测传感器20,所述原稿宽度探测传感器20对收容于原稿收容部11中的原稿m的宽度(第一扫描方向的长度)进行探测。
[0067]
而且,在与搬送路径15对置的部位,设有对在搬送路径15内搬送的原稿m的长度(第二扫描方向的长度)进行探测的原稿长度探测传感器30。
[0068]
[扫描仪装置]
[0069]
另一方面,扫描仪装置40可开闭地支撑所述原稿送给装置10,并且通过装置框架41来支承所述原稿送给装置10,而且,进行由原稿送给装置10所搬送的原稿m的图像读取。所述扫描仪装置40包括:装置框架41,形成框体;第一稿台玻璃(platen glass)42a,使欲读取图像的原稿m以静止的状态予以放置;以及第二稿台玻璃42b,设在反射板17的下方,构成用于对由原稿送给装置10所搬送的原稿m进行读取的光的开口部。
[0070]
而且,扫描仪装置40包括:全速托架(full rate carriage)43,静止在第二稿台玻璃42b之下,或者遍及第一稿台玻璃42a的整体来进行扫描,以读取图像;以及半速托架(half rate carriage)45,将从全速托架43获得的光供给至成像部。此处,全速托架43包括对原稿m照射光的光源装置44a(白色光源)及将来自光源装置44a的光反射向原稿m的光源镜44b、以及接收从原稿m获得的反射光的第一镜46a。另一方面,半速托架45具有将从第一镜46a获得的光提供给成像部的第二镜46b及第三镜46c。
[0071]
进而,扫描仪装置40包括成像用透镜47及受光部48。其中,成像用透镜47对从第三镜46c获得的光学像进行光学缩小。而且,受光部48对由成像用透镜47所成像的光学像进行光电转换。即,扫描仪装置40中,使用所谓的缩小光学系统来使像成像于受光部48。而且,本实施方式中,作为受光部48,使用将沿着第一扫描方向而设的红色用、绿色用及蓝色用的各摄像元件列沿着第二扫描方向配置而成的部件。由此,使用作为读取部件的一例的受光部48,将形成于原稿m的图像读取为全彩图像。
[0072]
并且,扫描仪装置40还包括控制/图像处理单元50。所述控制/图像处理单元50对从受光部48输入的原稿m的图像数据实施各种图像处理。而且,控制/图像处理单元50控制图像读取装置1的图像读取动作中的各部的动作。
[0073]
例如在对被放置于第一稿台玻璃42a的原稿m的图像进行读取的『固定读取模式』下,全速托架43与半速托架45以2:1的比例来沿箭头方向移动。此时,从设于全速托架43的光源装置44a而来的光被照射至原稿m的被读取面。并且,来自原稿m的反射光依第一镜46a、第二镜46b及第三镜46c的顺序受到反射而被导至成像用透镜47。被导至成像用透镜47的光在受光部48的受光面上成像。构成受光部48的各色用的摄像元件列分别包含一维的传感器,同时对一行(line)进行处理。使全速托架43及半速托架45沿与所述行方向(读取的第一扫描方向)交叉的方向(读取的第二扫描方向)移动,以读取原稿m的下一行。通过遍及整个原稿m来执行读取,从而完成一页面的原稿读取。
[0074]
另一方面,在对由原稿送给装置10所搬送的原稿m的图像进行读取的『搬送读取模式』下,沿第二扫描方向受到搬送的原稿m通过所述第二稿台玻璃42b之上。此时,全速托架43及半速托架45被置于停止在图1所示的实线位置的状态。并且,被搬送来的原稿m的第一行的反射光经由第一镜46a、第二镜46b及第三镜46c而以成像用透镜47来成像,通过受光部48来读取图像。即,在通过受光部48对第一扫描方向的一行同时进行处理后,读取由原稿送给装置10所搬送的原稿m的第一扫描方向的下一行。并且,在原稿m的前端到达第二稿台玻
璃42b的读取位置后,所述原稿m的后端通过第二稿台玻璃42b上的读取位置,由此,沿第一扫描方向逐行地依序读取原稿m,从而遍及第二扫描方向而完成一页面的原稿读取。
[0075]
<原稿>
[0076]
图3是用于说明在图1所示的图像读取装置1中成为读取对象的原稿m的结构的图。
[0077]
本例中,原稿m呈长方形状,原稿m的短边侧沿着第一扫描方向fs,且原稿m的长边侧沿着第二扫描方向ss。但是,也可能存在下述情况,即,原稿m的长边侧沿着第一扫描方向fs,且原稿m的短边侧沿着第二扫描方向ss。另外,以下的说明中,有时将前者称作“纵向”,将后者称作“横向”。而且,以下的说明中,将原稿m中的、成为第二扫描方向ss的上游侧的边称作原稿前端mt,将成为第二扫描方向ss的下游侧的边称作原稿后端mb,将原稿m的成为被读取面(图中为朝向跟前侧的面)的左侧的边称作原稿左端ml,将原稿m的成为被读取面的右侧的边称作原稿右端mr。而且,将原稿m的第二扫描方向ss(搬送方向)的长度称作原稿长度l,将原稿m的第一扫描方向fs的长度称作原稿宽度w。另外,在所述“纵向”的情况下,为原稿长度l>原稿宽度w,在所述“横向”的情况下,为原稿长度l<原稿宽度w。
[0078]
<原稿宽度探测传感器>
[0079]
图4是用于说明原稿宽度探测传感器20的安装位置的图。另外,图4中,与原稿宽度探测传感器20一同,还表示了对齐构件18与可收容在原稿收容部11中的各种原稿m的尺寸及方向的关系。
[0080]
本实施方式的图像读取装置1中,采用了将原稿m的第一扫描方向的中央作为基准线s来搬送原稿m的所谓的中心配准(center registration)方式。因此,本实施方式的对齐构件18将基准线s作为中心而在第一扫描方向fs上左右对称地配置,两者联动地沿第一扫描方向fs移动。
[0081]
而且,本实施方式的图像读取装置1在所述『搬送读取模式』中,从“名片纵向”直至“a3纵向、a4横向”为止,可进行各种尺寸及方向的原稿m的搬送及读取。若作进一步具体说明,则在所述图像读取装置1中,能够依照原稿宽度w由小到大的顺序,以搬送读取模式来读取“名片纵向”、“名片横向”、“a5纵向”、“a4纵向、a5横向”、“a3纵向、a4横向”共计五种原稿宽度w的原稿m(若以原稿m的种类来说,则为“名片”、“a5”、“a4”、“a3”这四种)。另外,本实施方式中,以名片的大小为所谓的东京4号的情况为例。
[0082]
因此,“a3纵向、a4横向”的原稿宽度w为297mm。而且,“a4纵向、a5横向”的原稿宽度w为210mm。进而,“a5纵向”的原稿宽度w为148mm。进而,“名片横向”的原稿宽度w为91mm。并且,“名片纵向”的原稿宽度w为55mm。
[0083]
而且,作为检测部件或者选择部件的一例的原稿宽度探测传感器20具有沿着第一扫描方向fs而排列的第一传感器21、第二传感器22及第三传感器23。若作进一步具体说明,则在以基准线s为中心的中心配准基准中,第一传感器21配置在成为最外侧(远离基准线s的一侧)的位置,第三传感器23配置在成为最内侧(靠近基准线s的一侧)的位置,第二传感器22配置在处于第一传感器21与第三传感器23之间的位置。若作进一步说明,则第一传感器21被安装在能够探测“a3纵向、a4横向”的原稿m,但无法探测“a4纵向、a5横向”、“a5纵向”、“名片横向”及“名片纵向”的原稿m的位置。而且,第二传感器22被安装在能够探测“a3纵向、a4横向”、“a4纵向、a5横向”的原稿m,但无法探测“a5纵向”、“名片横向”、“名片纵向”的原稿m的位置。进而,第三传感器23被安装在能够探测在『搬送读取模式』下可读取的所有
尺寸(“a3纵向、a4横向”、“a4纵向、a5横向”、“a5纵向”、“名片横向”及“名片纵向”)的原稿m的位置。
[0084]
图5是用于说明被收容在原稿收容部11中的原稿m的尺寸及方向与原稿宽度探测传感器的接通/断开的关系的图。以下,除了参照图4,还参照图5,来对在『搬送读取模式』下可读取的原稿m的尺寸及方向、与原稿宽度探测传感器20的输出的关系进行说明。
[0085]
首先,在原稿收容部11中设置有“a3纵向”或者“a4横向”的原稿m(原稿宽度w均为297mm)的情况下,第一传感器21、第二传感器22及第三传感器23这三者均为“接通”(以下称作“第一状态”)。而且,在原稿收容部11中设置有“a4纵向”或者“a5横向”的原稿m(原稿宽度w均为210mm)的情况下,第二传感器22及第三传感器23这两者为“接通”,另一方面,第一传感器21为“断开”(以下称作“第二状态”)。与此相对,在原稿收容部11中设置有“a5纵向”、“名片横向”或者“名片纵向”的原稿m的情况下,第三传感器23为“接通”,另一方面,第一传感器21及第二传感器22这两者为“断开”(以下称作“第三状态”)。
[0086]
此处,“a5纵向”的原稿宽度w为148mm,“名片横向”(东京4号)时的原稿宽度w为91mm,“名片纵向”(东京4号)的原稿宽度w为55mm,各原稿宽度w不同。因此,若原稿宽度探测传感器20的探测结果为“第一状态”或“第二状态”,则可唯一决定被收容在原稿收容部11中的原稿m的原稿宽度w。即,在“第一状态”下,可确定原稿宽度w为297mm,在“第二状态”下,可确定原稿宽度w为210mm。与此相对,若原稿宽度探测传感器20的探测结果为“第三状态”,则无法唯一决定被收容在原稿收容部11中的原稿m的原稿宽度w。即,在产生了“第三状态”的情况下,原稿宽度w有可能为148mm、91mm或者55mm中的任一个。换言之,只是产生了“第三状态”,无法确定原稿m的原稿宽度w。
[0087]
<控制/图像处理单元>
[0088]
图6是用于说明控制/图像处理单元50的功能结构的图。但是,图6中仅示出了与图像读取装置1的图像处理相关的功能结构,对于与图像读取装置1的图像读取动作的控制相关的功能结构,省略其记载。
[0089]
所述控制/图像处理单元50包括输出目标设定部51、读取图像数据存储部52、原稿宽度决定部53、原稿端部决定部54、原稿图像数据截取部55、原稿图像数据存储部56、原稿分析数据存储部57及原稿图像数据修正部58。以下,对构成控制/图像处理单元50的各部进行说明。
[0090]
输出目标设定部51在第一扫描方向fs上逐行地接收从受光部48送来的原稿m的读取结果。并且,输出目标设定部51关于所接收的原稿m的第一扫描方向fs的一行的读取结果,对于原稿m的搬送方向前端侧的数据,向读取图像数据存储部52与原稿端部决定部54进行输出,对于相同的原稿m的搬送方向后端侧的数据,向原稿端部决定部54进行输出。其结果,输出目标设定部51将读取图像数据ds输出至读取图像数据存储部52,所述读取图像数据ds是将一张(一页)原稿m的第一扫描方向fs的一行的读取结果汇总而成。而且,输出目标设定部51将前端侧图像数据dt输出至原稿端部决定部54,所述前端侧图像数据dt是将第二扫描方向ss的多行(不足一页)的、第一扫描方向fs的一行的读取结果汇总而成。另外,详细将后述,但实际的读取图像数据ds除了一张原稿m的读取结果以外,还包含较原稿m的各端部(原稿前端mt、原稿左端ml、原稿右端mr及原稿后端mb)处于外侧的区域的读取结果。因此,本实施方式的读取图像数据ds将读取比一张原稿m大的读取对象区域。
[0091]
读取图像数据存储部52包含随机存取存储器(random access memory,ram)等存储器,接收从输出目标设定部51送来的读取图像数据ds并予以存储。而且,读取图像数据存储部52依据来自原稿图像数据截取部55的请求,将自身存储的读取图像数据ds输出至原稿图像数据截取部55。
[0092]
作为设定部件的一例的原稿宽度决定部53接收从构成原稿宽度探测传感器20的第一传感器21~第三传感器23送来的原稿m的探测结果。并且,原稿宽度决定部53基于所接收的探测结果来暂时决定原稿m中的原稿左端ml及原稿右端mr。而且,原稿宽度决定部53根据暂时决定的原稿左端ml来暂时决定包含原稿左端ml的左侧搜寻范围rl,并且根据暂时决定的原稿右端mr来暂时决定包含原稿右端mr的右侧搜寻范围rr。并且,原稿宽度决定部53将由自身暂时决定的原稿左端ml、原稿右端mr、左侧搜寻范围rl及右侧搜寻范围rr输出至原稿端部决定部54。本实施方式中,左侧搜寻范围rl及右侧搜寻范围rr为端部的搜寻范围的一例。而且,左侧搜寻范围rl为第一搜寻范围的一例,右侧搜寻范围rr为第二搜寻范围的一例。
[0093]
作为搜寻部件的一例的原稿端部决定部54接收从输出目标设定部51送来的前端侧图像数据dt。而且,原稿端部决定部54从原稿宽度决定部53接收原稿左端ml、原稿右端mr、左侧搜寻范围rl及右侧搜寻范围rr。进而,原稿端部决定部54接收从原稿长度探测传感器30送来的原稿m的探测结果。并且,原稿端部决定部54基于所接收的各数据,来进行成为读取对象的原稿m中的各端部的位置、与原稿m的读取结果即读取图像数据ds中的原稿m的各端部的位置的暂时对应。若作进一步具体说明,则原稿端部决定部54基于所接收的各数据,来暂时决定读取图像数据ds中的、与原稿前端mt对应的前端位置pt、与原稿左端ml对应的左端位置pl、与原稿右端mr对应的右端位置pr、与原稿后端mb对应的后端位置pb。并且,原稿端部决定部54将暂时决定的前端位置pt、左端位置pl、右端位置pr及后端位置pb输出至原稿图像数据截取部55。本实施方式中,左端位置pl及右端位置pr为端部位置的一例。而且,左端位置pl为一端的位置的一例,右端位置pr为另一端的位置的一例。
[0094]
作为截取部件的一例的原稿图像数据截取部55接收从读取图像数据存储部52送来的读取图像数据ds。而且,原稿图像数据截取部55接收从原稿端部决定部54送来的前端位置pt、左端位置pl、右端位置pr及后端位置pb。并且,原稿图像数据截取部55基于所接收的各数据,来判别读取图像数据ds中读取原稿m而获得的区域与读取原稿m以外(具体而言为反射板17)而获得的区域,进行与原稿m的读取结果对应的数据的提取及输出。换言之,原稿图像数据截取部55对读取图像数据ds实施基于前端位置pt、左端位置pl、右端位置pr及后端位置pb的截取处理,并将所获得的原稿图像数据dm输出至原稿图像数据存储部56。
[0095]
原稿图像数据存储部56接收从原稿图像数据截取部55送来的原稿图像数据dm并予以存储。而且,原稿图像数据存储部56根据需要来将自身所存储的原稿图像数据dm输出至设在外部的设备(本例中为ocr装置3)。进而,原稿图像数据存储部56依据来自原稿图像数据修正部58的请求,将自身所存储的原稿图像数据dm输出至原稿图像数据修正部58。
[0096]
原稿分析数据存储部57接收对从设在外部的设备(本例中为ocr装置3)送来的原稿图像数据dm实施ocr处理而获得的原稿分析数据da并予以存储。而且,原稿分析数据存储部57依据来自原稿图像数据修正部58的请求,将自身所存储的原稿分析数据da输出至原稿图像数据修正部58。本实施方式中,原稿分析数据da是光学字符识别处理数据的一例。
[0097]
原稿图像数据修正部58从原稿图像数据存储部56接收原稿图像数据dm。而且,原稿图像数据修正部58从原稿分析数据存储部57接收对与所述原稿图像数据dm相同的原稿m进行分析而获得的原稿分析数据da。并且,原稿图像数据修正部58对于所接收的原稿图像数据dm,根据需要来进行基于原稿分析数据da的、原稿m的端部位置的修正。因此,原稿图像数据修正部58也有可能不进行对原稿图像数据dm的修正。然后,原稿图像数据修正部58将输出数据do(=原稿图像数据dm+原稿分析数据da)输出至设在外部的设备(本例中为服务器装置2),所述输出数据do是将已修正或者未修正的原稿图像数据dm与原稿分析数据da对应而成。
[0098]
<搬送读取模式下的图像处理的流程>
[0099]
图7是用于说明搬送读取模式下的图像处理的流程的流程图。另外,假设在初始状态下,在图像读取装置1的原稿收容部11中,以“纵向”或“横向”的方向(其中,在a3尺寸的情况下,只能为“纵向”)而收容(载放)有某尺寸(名片、a5、a4、a3的任一种)的原稿m。
[0100]
首先,图像读取装置1从使用者受理基于搬送读取模式的“读取指示”(步骤10)。伴随于此,原稿宽度决定部53获取第一传感器21~第三传感器23对原稿m的探测结果即原稿宽度探测结果(步骤20)。继而,原稿宽度决定部53基于所获取的原稿宽度探测结果,来暂时决定被收容在原稿收容部11中的原稿m的原稿宽度w、原稿左端ml的位置、原稿右端mr的位置、包含原稿左端ml的位置的左侧搜寻范围rl以及包含原稿右端mr的位置的右侧搜寻范围rr(步骤30)。
[0101]
继而,开始被收容在原稿收容部11中的原稿m的搬送动作,并且开始使用受光部48的原稿m的读取动作。本实施方式的情况下,如上所述,原稿m是以将位于第一扫描方向fs的中央的基准线s作为中心的所谓中心配准方式而受到搬送。而且,伴随于此,输出目标设定部51开始受光部48的读取结果的获取。即,输出目标设定部51开始与受到搬送的原稿m相关的读取图像数据ds的获取(步骤40)。此时,输出目标设定部51对读取图像数据存储部52及原稿端部决定部54并列地进行数据的输出,其结果,对读取图像数据存储部52输出读取图像数据ds,对原稿端部决定部54输出前端侧图像数据dt。本例中,前端侧图像数据dt向原稿端部决定部54的输出结束后,读取图像数据ds向读取图像数据存储部52的输出结束。并且,读取图像数据存储部52存储被送来的读取图像数据ds。
[0102]
接下来,原稿端部决定部54对于从输出目标设定部51接收的原稿m的前端侧图像数据dt,在步骤30中暂时决定的左侧搜寻范围rl、右侧搜寻范围rr搜寻边缘(步骤50)。若作进一步具体说明,则原稿端部决定部54对于前端侧图像数据dt,在左侧搜寻范围rl的范围内进行与原稿左端ml对应的左端位置pl的搜寻,并且在右侧搜寻范围rr的范围内进行与原稿右端mr对应的右端位置pr的搜寻。
[0103]
继而,原稿端部决定部54判断是否找到所述两端的边缘(步骤60)。若作进一步具体说明,则判断在前端侧图像数据dt中是否检测到左端位置pl及右端位置pr这两者。另外,第一扫描方向fs上的左端位置pl的检测是基于在所述左侧搜寻范围rl的范围内是否存在沿着第二扫描方向ss而延伸的直线状的条纹来进行。而且,第一扫描方向fs上的右端位置pr的检测是基于在所述右侧搜寻范围rr的范围内是否存在沿着第二扫描方向ss而延伸的直线状的条纹来进行。
[0104]
另外,所述步骤50中,原稿端部决定部54获取原稿长度探测传感器30对原稿m的探
测结果即原稿长度探测结果。并且,原稿端部决定部54基于所获取的原稿长度探测结果,来决定进行搬送及读取的原稿m的原稿长度l、原稿前端mt及原稿后端mb。
[0105]
在步骤60中进行了肯定判断(是)的情况下,原稿端部决定部54基于前端侧图像数据dt来决定左端位置pl、右端位置pr(步骤70)。原稿端部决定部54将在受光部48的受光结果即前端侧图像数据dt中找到的第一扫描方向fs的两端边缘直接决定为左端位置pl及右端位置pr。
[0106]
继而,原稿图像数据截取部55对于从读取图像数据存储部52读出的读取图像数据ds,进行将原稿端部决定部54所决定的前端位置pt、左端位置pl、右端位置pr及后端位置pb作为边界的数据的提取。换言之,原稿图像数据截取部55从读取图像数据ds中,基于所述各端部位置来截取原稿图像数据dm(步骤80)。像这样被截取的原稿图像数据dm被存储在原稿图像数据存储部56中,并且从原稿图像数据存储部56被读出,并经由网络4而发送至ocr装置3(步骤90)。
[0107]
此处,ocr装置3对所接收的原稿图像数据dm实施公知的ocr处理。本实施方式的ocr装置3通过对原稿图像数据dm实施ocr处理,来制作原稿分析数据da。在所述原稿分析数据da中,包含对多个字符(字符码)进行数据化而成的字符数据dc与对各字符的配置进行数据化而成的位置数据dp(参照后述的图9的(c)、图9的(f))。并且,ocr装置3将所制作的原稿分析数据da经由网络4而发送(返送)至图像读取装置1。
[0108]
图像读取装置1接收所述原稿分析数据da(步骤100),所接收的原稿分析数据da被存储在原稿分析数据存储部57中。继而,原稿图像数据修正部58将基于共同(相同)的原稿m而获得的、从原稿图像数据存储部56读出的原稿图像数据dm、与从原稿分析数据存储部57读出的原稿分析数据da相关联而制作输出数据do,并经由网络4而发送至服务器装置2(步骤170)。这样,在步骤60中进行了肯定判断(是)的情况下,原稿图像数据修正部58不对原稿图像数据dm特别实施修正,而直接进行输出。
[0109]
与此相对,在所述步骤60中进行了否定判断(否)的情况下,原稿端部决定部54基于在步骤20中获取的原稿宽度探测结果而非前端侧图像数据dt,来决定左端位置pl、右端位置pr(步骤120)。换言之,原稿端部决定部54根据原稿宽度探测传感器20(第一传感器21~第三传感器23)的探测结果而非原稿m的读取结果,来决定前端侧图像数据dt中的左端位置pl及右端位置pr。
[0110]
继而,原稿图像数据截取部55对于从读取图像数据存储部52读出的读取图像数据ds,进行将原稿端部决定部54所决定的前端位置pt、左端位置pl、右端位置pr及后端位置pb作为边界的数据的提取。换言之,原稿图像数据截取部55从读取图像数据ds中,基于所述各端部位置来截取原稿图像数据dm(步骤130)。像这样截取的原稿图像数据dm被存储在原稿图像数据存储部56中,并且从原稿图像数据存储部56被读出,并经由网络4而发送至ocr装置3(步骤140)。
[0111]
图像读取装置1从ocr装置3中接收原稿分析数据da(步骤150),所接收的原稿分析数据da被存储至原稿分析数据存储部57。接下来,原稿图像数据修正部58对于从原稿图像数据存储部56读出的原稿图像数据dm,实施基于从原稿分析数据存储部57读出的原稿分析数据da的修正。若作进一步具体说明,则原稿图像数据修正部58基于构成原稿分析数据da的位置数据dp,对于原稿图像数据dm进行与各端部(尤其是左端位置pl及右端位置pr)相关
的再截取。并且,原稿图像数据修正部58将从原稿图像数据存储部56读出且由自身实施了修正的原稿图像数据dm与从原稿分析数据存储部57读出的原稿分析数据da相关联而制作输出数据do,并经由网络4而发送至服务器装置2(步骤170)。另外,在收到输出数据do的服务器装置2中,存储所接收的输出数据do。
[0112]
<具体例>
[0113]
那么,对于所述搬送读取模式下的图像处理,举具体例来进行说明。
[0114]
图8是用于说明在步骤20中获取的原稿宽度探测结果、与在步骤30中暂时决定的原稿左端ml及原稿右端mr的各位置的关系的图。但是,图8中,对于基于原稿左端ml而决定的左侧搜寻范围rl、及基于原稿右端mr而决定的右侧搜寻范围rr,也标注括号来表示。
[0115]
(第一状态)
[0116]
首先,在第一传感器21、第二传感器22及第三传感器23全部为“接通”的“第一状态”的情况下,原稿宽度决定部53进行被收容在原稿收容部11中并且成为读取对象的原稿m的原稿宽度w为“297mm”这一暂时决定。
[0117]
接下来,原稿宽度决定部53关于所述原稿m,进行原稿左端ml为
“-
148.5mm”,原稿右端mr为“+148.5mm”这一暂时决定。
[0118]
并且,原稿宽度决定部53分别将包含原稿左端ml成为原稿左端ml
±
5mm的
“-
153.5mm~-143.5mm”暂时决定为左侧搜寻范围rl,将包含原稿右端mr且成为原稿右端mr
±
5mm的“+143.5mm~+153.5mm”暂时决定为右侧搜寻范围rr。
[0119]
本例中,以所谓的中心配准方式来搬送原稿m。因此,原稿左端ml及原稿右端mr的位置(第一扫描方向fs的坐标)是通过以基准线s作为原点而在第一扫描方向fs上将原稿m的原稿宽度w二等分而获得。而且,本例中,将左侧搜寻范围rl设为原稿左端ml
±
5mm,将右侧搜寻范围rr设为原稿右端
±
5mm,但大小也可为5mm以外,而且,也可在正方向与负方向上大小不同,例如+10mm且-5mm等。并且,这些情况在以下所示的第二状态及第三状态下也相同。
[0120]
(第二状态)
[0121]
而且,在第一传感器21为“断开”且第二传感器22及第三传感器23为“接通”的“第二状态”的情况下,原稿宽度决定部53进行被收容在原稿收容部11中并且成为读取对象的原稿m的原稿宽度w为“210mm”这一暂时决定。
[0122]
接下来,原稿宽度决定部53关于所述原稿m,进行原稿左端ml为
“-
105mm”,原稿右端mr为“+105mm”这一暂时决定。
[0123]
并且,原稿宽度决定部53分别将包含原稿左端ml且成为原稿左端ml
±
5mm的
“-
110.0mm~-100.0mm”暂时决定为左侧搜寻范围rl,将包含原稿右端mr且成为原稿右端mr
±
5mm的“+100.0mm~+110.0mm”暂时决定为右侧搜寻范围rr。
[0124]
(第三状态)
[0125]
进而,在第一传感器21及第二传感器22为“断开”且第三传感器23为“接通”的“第三状态”的情况下,原稿宽度决定部53进行被收容在原稿收容部11中并且成为读取对象的原稿m的原稿宽度w为“148mm”这一暂时决定。
[0126]
接下来,原稿宽度决定部53关于所述原稿m,进行原稿左端ml为
“-
74mm”,原稿右端mr为“+74mm”这一暂时决定。
[0127]
并且,原稿宽度决定部53分别将包含原稿左端ml且成为原稿左端ml
±
5mm的
“-
79.0mm~-69.0mm”暂时决定为左侧搜寻范围rl,将包含原稿右端mr且成为原稿右端mr
±
5mm的“+69.0mm~+79.0mm”暂时决定为右侧搜寻范围rr。
[0128]
此处,在探测到所述“第一状态”~“第三状态”中的“第一状态”及“第二状态”的情况下,实际的原稿m的原稿宽度w与在步骤20中暂时决定的原稿宽度w大致一致。因此,在步骤60中进行肯定判断(是),随后,依序执行步骤70~步骤100及步骤170的处理。
[0129]
与此相对,在探测到“第三状态”的情况下,可能存在实际的原稿m的原稿宽度w与在步骤20中暂时决定的原稿宽度w大致一致的情况(原稿m为“a5纵向”的情况)、与不完全一致的情况(原稿m为“名片横向”或“名片纵向”的情况)。其中,在原稿宽度w彼此大致一致的前者的情况下,与所述“第一状态”及“第二状态”同样,在步骤60中进行肯定判断(是),随后,依序执行步骤70~步骤100及步骤170的处理。与此相对,在原稿宽度w彼此不完全一致的后者的情况下,在步骤60中进行否定判断(否),随后,依序进行步骤120~步骤170的处理。
[0130]
以下,对于所述“第三状态”中的、原稿m为“a5纵向”的情况(以下称作“第一例”)与为“名片横向”的情况(以下称作“第二例”),更具体地进行说明。
[0131]
[第一例]
[0132]
首先,对第一例即为“a5纵向”的情况(在步骤60中进行肯定判断(是)的情况)进行说明。
[0133]
图9的(a)至图9的(c)是用于说明“第一例”的图。此处,图9的(a)表示了读取图像数据ds及前端侧图像数据dt、与左侧搜寻范围rl及右侧搜寻范围rr、与原稿前端mt、原稿后端mb、原稿左端ml及原稿右端mr的关系。而且,图9的(b)表示了原稿图像数据dm与原稿前端mt、原稿后端mb、原稿左端ml及原稿右端mr、与前端位置pt、后端位置pb、左端位置pl及右端位置pr的关系。进而,图9的(c)表示了构成输出数据do的原稿图像数据dm及原稿分析数据da的关系。另外,图9的(c)还表示了构成原稿分析数据da的字符数据dc及位置数据dp的关系。
[0134]
在原稿m为“a5纵向”的情况下,原稿左端ml位于基于原稿宽度探测传感器20的探测结果而暂时决定的左侧搜寻范围rl中,且原稿右端mr位于右侧搜寻范围rr中(参照图9的(a))。伴随于此,在步骤60中进行肯定判断(是)。而且,基于原稿长度探测传感器30的探测结果来决定原稿前端mt及原稿后端mb。
[0135]
此时,基于受光部48对原稿m的前端侧的读取结果即前端侧图像数据dt,根据原稿左端ml来决定左端位置pl,并且根据原稿右端mr来决定右端位置pr(步骤70)。而且,根据所述原稿前端mt来决定前端位置pt,并且根据原稿后端mb来决定后端位置pb。因此,在“第一例”的情况下,原稿前端mt及前端位置pt一致,原稿后端mb及后端位置pb一致,原稿左端ml及左端位置pl一致,原稿右端mr及右端位置pr一致。这样,在“第一例”的情况下,四个端部位置全部一致。
[0136]
并且,对于原稿m整体的读取结果即读取图像数据ds,以所述前端位置pt、后端位置pb、左端位置pl及右端位置pr进行截取(参照步骤80、图9的(b))。另外,本例中,假设在“a5纵向”的原稿m的读取对象面上,记载有字符串(图示的示例中是将“abcde fghij klmno pqrst uvwxy”在每行排列成5段)。
[0137]
随后,将所述原稿图像数据dm发送至ocr装置3(步骤90),并且从ocr装置3接收对原稿图像数据dm的ocr处理结果即原稿分析数据da(步骤100)。此处,原稿分析数据da包含将所述字符串数据化而成的字符数据dc、与将各字符的排列数据化而成的位置数据dp(参照图9的(c))。
[0138]
此处,在“第一例”的情况下,将使原稿分析数据da与图9的(b)所示的未修正的原稿图像数据dm关联而成的输出数据do(参照图9的(c))在步骤170中发送至服务器装置2,完成一连串的处理。
[0139]
[第二例]
[0140]
继而,对第二例即“名片横向”的情况(在步骤60中进行否定判断(否)的情况)进行说明。
[0141]
图9的(d)至图9的(f)是用于说明“第二例”的图。此处,图9的(d)表示了读取图像数据ds及前端侧图像数据dt、与左侧搜寻范围rl及右侧搜寻范围rr、与原稿前端mt、原稿后端mb、原稿左端ml及原稿右端mr的关系。而且,图9的(e)表示了原稿图像数据dm、与原稿前端mt、原稿后端mb、原稿左端ml及原稿右端mr、与前端位置pt、后端位置pb、左端位置pl及右端位置pr的关系。进而,图9的(f)表示了构成输出数据do的原稿图像数据dm及原稿分析数据da的关系。另外,图9的(f)还表示了构成原稿分析数据da的字符数据dc及位置数据dp的关系。
[0142]
在原稿m为“名片横向”的情况下,原稿左端ml并不位于基于原稿宽度探测传感器20的探测结果而暂时决定的左侧搜寻范围rl中,且原稿右端mr并不位于右侧搜寻范围rr中(参照图9的(d))。伴随于此,在步骤60中进行否定判断(否)。而且,基于原稿长度探测传感器30的探测结果来决定原稿前端mt及原稿后端mb。
[0143]
此时,基于原稿宽度探测传感器20对原稿m的探测结果即原稿宽度探测结果,来决定左端位置pl及右端位置pr(步骤120)。若作进一步具体说明,则根据原稿宽度w比实际的原稿m(名片横向)大的“a5纵向”的原稿左端ml来决定左端位置pl,根据同样的“a5纵向”的原稿右端mr来决定右端位置pr。此时,左端位置pl较实际的原稿m(名片横向)的原稿左端ml位于左侧(外侧),而且,右端位置pr较实际的原稿m(名片横向)的原稿右端mr位于右侧(外侧)(参照图9的(e))。而且,对应于“a5纵向”来决定前端位置pt及后端位置pb。因此,在“第二例”的情况下,原稿前端mt及前端位置pt一致,但原稿后端mb及后端位置pb、原稿左端ml及左端位置pl、原稿右端mr及右端位置pr不一致。这样,在“第二例”的情况下,一个端部位置一致但另外三个端部位置全部不一致。
[0144]
并且,对于原稿m整体的读取结果即读取图像数据ds,以所述前端位置pt、后端位置pb、左端位置pl及右端位置pr进行截取(参照步骤130、图9的(e))。伴随于此,对较原稿m大的区域进行读取而获得的读取图像数据ds被加工成更小尺寸的原稿图像数据dm。另外,本例中,假设在“名片横向”的原稿m的读取对象面上,记载有字符串(图示的示例中,是将
“○○○
股份有限公司富士太郎电话号码(详细省略)电子邮件地址(详细省略)”排列成4段)。但是,在“第二例”的情况下,原稿图像数据dm的区域明显比实际的原稿m的区域大,因此即使在对读取图像数据ds实施了截取的状态下,在原稿图像数据dm中仍存在大的成为留白的区域。
[0145]
随后,将所述原稿图像数据dm发送至ocr装置3(步骤140),并且从ocr装置3接收对
原稿图像数据dm的ocr处理结果即原稿分析数据da(步骤150)。此处,原稿分析数据da包含将所述字符串数据化而成的字符数据dc、与将各字符的排列数据化而成的位置数据dp(参照图9的(f))。
[0146]
此处,在“第二例”的情况下,并非将原稿图像数据dm直接输出,而是进行基于原稿分析数据da的修正(再截取)(步骤160)。若作进一步具体说明,则在步骤160中,基于原稿分析数据da(尤其是位置数据dp),在原稿图像数据dm中进行存在字符串的区域的提取,并进行端部位置(前端位置pt、后端位置pb、左端位置pl及右端位置pr)的再设定及基于再设定的再截取,以包含所有的所述字符串。此处,对于再设定的端部位置,理想的是将四个端部位置全部设为对象,但优选的是如图9的(f)所例示的那样,至少将左端位置pl及右端位置pr这两者设为对象。伴随于此,截取比原稿m大的区域而获得的原稿图像数据dm(参照图9的(e))被再加工为更小尺寸的原稿图像数据dm(参照图9的(f))。
[0147]
并且,在“第二例”的情况下,将使原稿分析数据da与通过所述步骤160修正完毕的原稿图像数据dm相关联而成的输出数据do(参照图9的(f))在步骤170中发送至服务器装置2,完成一连串的处理。
[0148]
<其他>
[0149]
另外,本实施方式中,若未能在步骤60中找到原稿m的第一扫描方向fs的两端的边缘(原稿左端ml及原稿右端mr),则基于原稿宽度探测传感器20的原稿宽度探测结果来决定左端位置pl及右端位置pr,但并不限于此。例如,在步骤60中进行了否定判断(否)的情况下,也可将读取图像数据ds其自身发送至ocr装置3,基于所获得的原稿分析数据da来决定包含左端位置pl及右端位置pr的端部位置。此时,通过对读取图像数据ds实施基于原稿分析数据da的截取,而获得原稿图像数据dm。
[0150]
而且,本实施方式中,若未能在步骤60中找到原稿m的第一扫描方向fs的两端的边缘(原稿左端ml及原稿右端mr),则仅基于原稿宽度探测传感器20的原稿宽度探测结果来决定左端位置pl及右端位置pr,但并不限于此。例如也可将通过用户的输入而受理的原稿m的尺寸信息(“a4纵向”等)或对齐构件18的位置信息进一步加入到判断基准中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1