一种煤矿井下单基站精确定位的方法与流程
[0001]
本发明涉及一种煤矿井下单基站精确定位的方法。
背景技术:
[0002]
目前,随着开采深度增加、开采规模的不断增大,煤矿安全生产问题越来越突出,已成为制约矿井安全、经济、有效开采的主要因素。煤矿井下精确人员定位系统现已作为煤矿必备的“六大系统”之一,在井下人员考勤、规范生产行为、特种作业人员管理、生产调度、应急救援方面发挥着重要作用。
[0003]
现有的煤矿井下精确人员定位系统因为综合了矿井精确定位和区域定位,并使用环网方式传输检测数据,且基站与基站之间自带环网级联接口,所以建设一整套矿用精确人员定位系统成本偏高。由于井下路径复杂,实现井下信号全覆盖则需要井下布置的基站数量较多,原本每个检测点需要布置两台基站才能实现方向性,通信网络及工程实施难度成本高,难度大。现有的同类产品虽然可以实现精确定位,但工程实施难度大,成本高。
技术实现要素:
[0004]
本发明所要解决的技术问题是,克服现有技术的不足,提供一种煤矿井下单基站精确定位的方法,针对井下环境,以及通信网络及工程实施难度成本等因素,在基站部署受数量及位置限制的区域进行精确定位。
[0005]
为了解决上述技术问题,本发明的技术方案是:
[0006]
一种煤矿井下单基站精确定位的方法,它包括:
[0007]
s1、定位终端向定位基站发送广播信息,定位基站的定向天线a和定向天线b接收定位终端发送的uwb信号,定位基站的zigbee天线接收定位终端发送的zigbee信号,并由定位基站记录接收时间戳t1;
[0008]
s2、定位基站通过zigbee信号确定定位终端的位置,同时定位基站通过定向天线a和定向天线b接收到的uwb信号对定位终端进行精确定位并判断出矿工在巷道内行走的方向性;
[0009]
s3、定位基站回复定位终端信息,并记录发送时间戳t2,定位基站计算得出处理信息时间td1=(t2-t1);
[0010]
s4、定位终端向定位基站回送信息,回送信息包括定位终端广播开始时间戳t0和接收基站回送信息时间戳t3的差值ta,ta=t3-t0;
[0011]
s5、定位基站计算定位终端到定位基站的距离s=(ta-td1)/2*c;
[0012]
s6、重复步骤s1到步骤s5,对定位终端到定位基站的距离s进行多次测量,将多次测量的距离s进行滤波修正,得出距离s的精确值。
[0013]
所述步骤s2包括:
[0014]
定位基站判断是否为定向天线a接收到uwb信号,若是,则确定佩戴定位终端的矿工位于定位基站的a侧;
[0015]
定位基站判断是否为定向天线b接收到uwb信号,若是,则确定佩戴定位终端的矿工位于定位基站的b侧。
[0016]
所述步骤s6中将多次测量的距离s进行滤波修正,得出距离s的精确值的方法包括:
[0017]
步骤s61、基于卡尔曼滤波器,由k-1时刻测试距离s
k-1
,预测k时刻距离值s
′
k
,
[0018]
s
′
k
=as
k-1
+bu
k-1
;
[0019]
由k-1时刻距离误差协方差矩阵p
k-1
,预测k时刻误差协方差p
′
k
,
[0020]
p
′
k
=ap
k-1
a
t
+q;
[0021]
其中,
[0022]
a表示上一状态到当前状态的转换矩阵;
[0023]
b表示控制输入到当前状态的转换矩阵;
[0024]
u表示控制输入;
[0025]
q表示过程噪声协方差矩阵;
[0026]
r表示测量噪声协方差矩阵;
[0027]
h表示当前状态到测量的转换矩阵;
[0028]
步骤s62、计算滤波权重k
k
,
[0029]
k
k
=p
′
k
h
t
(hp
′
k
h
t
+r);
[0030]
计算k时刻最优距离误差协方差矩阵p
k
,
[0031]
p
k
=(i-k
k
hp
′
k
);
[0032]
计算k时刻距离s的最优值,
[0033]
s
k
=s
′
k
+k
k
(z
k-hs
′
k
);
[0034]
其中,
[0035]
i为单模型,值为1;
[0036]
z
k
为当前状态的距离测量值。
[0037]
步骤s7、所述定位基站将定位终端的位置信息上传至上位机软件。
[0038]
采用了上述技术方案,本发明具有以下的有益效果:
[0039]
1、本发明采用uwb和zigbee双频段与井下定位终端信息交互,保证了高精度和高实时性的同时,实现文字、语音、视频信息的互传,为定位终端设备实时性高的业务提供基础数据。
[0040]
2、本发明的定向天线背面经特殊处理,定位终端在天线背面时,定位基站完全收不到数据,实现真正的定向测距,天线正面测距范围大,为实现井下信号全覆盖减小施工量和成本。
附图说明
[0041]
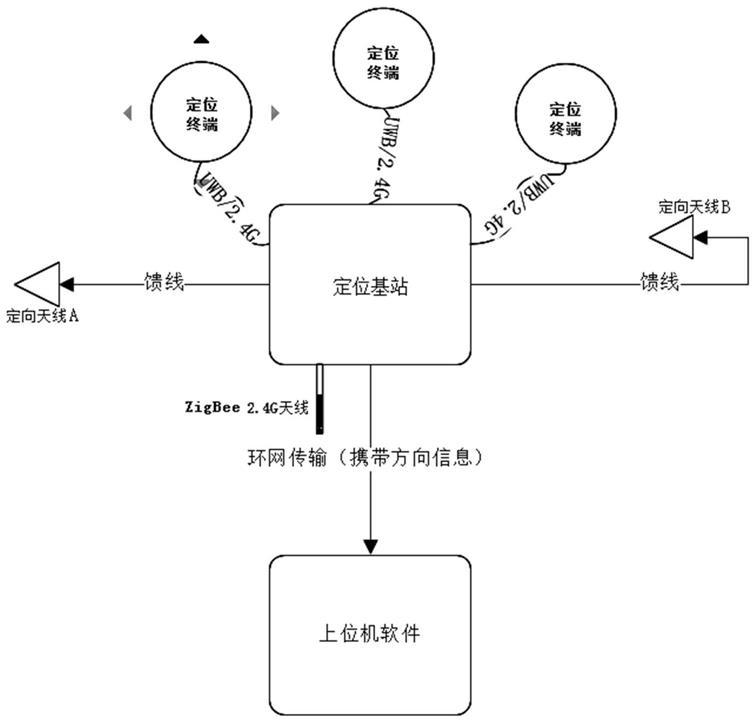
图1为本发明的一种煤矿井下单基站精确定位的方法的硬件设备的原理框图;
[0042]
图2为本发明的一种煤矿井下单基站精确定位的流程图;
[0043]
图3为本发明的一种煤矿井下单基站精确定位的通讯简化示意图。
具体实施方式
[0044]
为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本发明作进一步详细的说明。
[0045]
如图1所示,本发明中采用的定位基站设置有一根zigbee天线和两根定向天线,定向天线a和定向天线b分别位于定位基站的两侧,用于接收定位终端的uwb信号。定位终端与定位基站通信会发送uwb和zigbee两个频段的无线信号,其中uwb信号用于测距,zigbee的2.4g信号用于辅助定位,uwb信号定位可以精确到厘米级,定位更加精确。定位基站收到同一个定位终端的uwb信号后,根据定向天线正面的朝向即可测算出佩戴定位终端的矿工在当前巷道内的准确方向,为井下人员或设备实时性高的业务提供基础数据。
[0046]
如图2所示,一种煤矿井下单基站精确定位的方法,它包括:
[0047]
s1、定位终端向定位基站发送广播信息,信息包含终端状态编码、短信编码、语音编码等;定位基站的定向天线a和定向天线b接收定位终端发送的uwb信号,定位基站的zigbee天线接收定位终端发送的zigbee信号,并由定位基站记录接收时间戳t1;
[0048]
s2、定位基站通过zigbee信号确定定位终端的位置,同时定位基站通过定向天线a和定向天线b接收到的uwb信号对定位终端进行精确定位并判断出矿工在巷道内行走的方向性;
[0049]
s3、定位基站回复定位终端信息,回复信息包含状态编码、短信编码、语音编码等,并记录发送时间戳t2,定位基站计算得出处理信息时间td1=(t2-t1);
[0050]
s4、定位终端向定位基站回送信息,回送信息包括定位终端广播开始时间戳t0和接收基站回送信息时间戳t3的差值ta=t3-t0、终端状态编码、短信编码、语音编码等;
[0051]
s5、定位基站计算定位终端到定位基站的距离s=(ta-td1)/2*c;
[0052]
s6、重复步骤s1到步骤s5,对定位终端到定位基站的距离s进行多次测量,将多次测量的距离s进行滤波修正,得出距离s的精确值。
[0053]
步骤s2包括:
[0054]
定位基站判断是否为定向天线a接收到uwb信号,若是,则确定佩戴定位终端的矿工位于定位基站的a侧;
[0055]
定位基站判断是否为定向天线b接收到uwb信号,若是,则确定佩戴定位终端的矿工位于定位基站的b侧。
[0056]
步骤s6中将多次测量的距离s进行滤波修正,得出距离s的精确值的方法包括:
[0057]
步骤s61、基于卡尔曼滤波器,由k-1时刻测试距离s
k-1
,预测k时刻距离值s
′
k
,
[0058]
s
′
k
=as
k-1
+bu
k-1
;
[0059]
由k-1时刻距离误差协方差矩阵p
k-1
,预测k时刻误差协方差p
′
k
,
[0060]
p
′
k
=ap
k-1
a
t
+q;
[0061]
其中,
[0062]
a表示上一状态到当前状态的转换矩阵;
[0063]
b表示控制输入到当前状态的转换矩阵;
[0064]
u表示控制输入;
[0065]
q表示过程噪声协方差矩阵;
[0066]
r表示测量噪声协方差矩阵;
[0067]
h表示当前状态到测量的转换矩阵;
[0068]
步骤s62、计算滤波权重k
k
,
[0069]
k
k
=p
′
k
h
t
(hp
′
k
h
t
+r);
[0070]
计算k时刻最优距离误差协方差矩阵p
k
,
[0071]
p
k
=(i-k
k
hp
′
k
);
[0072]
计算k时刻距离s的最优值,
[0073]
s
k
=s
′
k
+k
k
(z
k-hs
′
k
);
[0074]
其中,
[0075]
i为单模型,值为1;
[0076]
z
k
为当前状态的距离测量值。
[0077]
步骤s7、定位基站将定位终端的位置信息、状态编码、短信编码、语音编码等上传至上位机软件。上位机软件用于将定位基站上传的实时数据进行统计,可在上位机软件上实现对定位终端实时性高的业务,如导航、路线规划、井下位置实时监控、语音对讲等。
[0078]
如图3所示,对本发明的通讯和测距原理进行进一步的说明:
[0079]
定位终端发送广播信息,记录发送时间戳t0;
[0080]
定位基站接收广播信息,记录接收时间戳t1;
[0081]
定位基站回复定位终端信息,记录发送时间戳t2;
[0082]
定位终端接收回复信息,记录发送时间戳t3;
[0083]
飞行时间:tf=(t1-t0)=(t3-t2)=(t5-t4);
[0084]
定位基站处理数据时间:td1=(t2-t1);
[0085]
测距完成总时间:ta=t3-t0;
[0086]
距离s=(ta-td1)/2*c,c为光速。
[0087]
以上所述的具体实施例,对本发明解决的技术问题、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1