摄像头模组和电子设备的制作方法
1.本技术涉及镜头驱动领域,并且更具体地,涉及一种摄像头模组和电子设备。
背景技术:
2.随着电子设备技术的不断发展和设备功能的不断扩展,目前的电子设备例如手机、平板电脑等都能够为用户提供拍照或录像功能。与此同时,用户对于电子设备的拍摄质量的要求也在不断提高,对于多种拍摄场景的需求愈发普遍。
3.例如,用户在手持电子设备拍摄时,由于手的抖动和身体的运动,会导致画面抖动、成像模糊。虽然可以通过电子防抖(electronics image stabilization,eis)和人工智能防抖(artificial intelligence image stabilization,ais)剪裁边缘,实现整体图像的稳定,但无法解决成像模糊的问题。目前实现光学防抖(optical image stabilization,ois)所采用的马达行程有限,很难满足更大角度的ois行程需求。
4.又如,当前马达的对焦稳定时间(settling time)基本满足30帧视频的要求,但对于更高帧数例如60帧视频来说,由于单帧时间变短,当前的对焦稳定时间会影响对焦流畅度和对焦速度,存在对焦速度慢、对焦帧内图像模糊的现象,影响用户体验。因此,需要提供新的方案以满足用户更高的拍摄要求。
技术实现要素:
5.本技术提供一种摄像头模组和电子设备,能够提高光学防抖角度,提升光学防抖和自动对焦的精度和响应速度。
6.第一方面,提供了一种摄像头模组,包括:镜头和镜组致动器,所述镜组致动器用于驱动所述镜头沿第一目标方向运动,其中所述第一目标方向包括光轴方向和/或垂直于光轴的方向;图像传感器和微机电系统mems致动器,所述mems致动器用于驱动所述图像传感器沿第二目标方向运动,所述第二目标方向包括光轴方向和/或垂直于光轴的方向;行程分配部,所述行程分配部用于根据对焦信息和/或抖动信息,确定第一行程信号和第二行程信号,所述第一行程信号用于指示所述镜头进行自动对焦af和/或光学防抖ois时的第一行程,所述第二行程信号用于指示所述图像传感器进行af和/或ois时的第二行程,其中所述第一行程在所述光轴方向上的分量与所述第二行程在所述光轴方向上的分量之和等于目标行程在所述光轴方向上的分量,所述第一行程在所述垂直于光轴的方向上的分量与所述第二行程在所述垂直于光轴的方向上的分量之和等于所述目标行程在所述垂直于光轴的方向上的分量,其中所述目标行程为所述摄像头模组进行af和/或ois所需的最短行程;镜组移动控制部,所述镜组移动控制部用于根据所述第一行程信号,控制所述镜组致动器驱动所述镜头移动至第一目标位置,所述第一目标位置与所述第一行程对应;图像传感器移动控制部,所述图像传感器移动控制部用于根据所述第二行程信号,控制所述mems致动器驱动所述图像传感器移动至第二目标位置,所述第二目标位置与所述第二行程对应。
7.应理解,本技术实施例中第一行程在光轴方向上的分量可以理解为镜头的af行
程,第一行程在垂直于光轴的方向上的分量理解为镜头的ois行程。第二行程在光轴方向上的分量可以理解为图像传感器的af行程,第二行程在垂直于光轴的方向上的分量理解为图像传感器的ois行程。
8.还应理解,在只进行af时,目标行程可以理解为自动对焦所需的最短行程,该目标行程为沿光轴方向的行程。在只进行ois时,目标行程可以理解为光学防抖所需的最短行程,该目标行程为沿垂直光轴方向的行程。在进行af和ois时,则目标行程在光轴方向上的分量为自动对焦所需的最短行程,目标行程在垂直于光轴的方向上的分量为光学防抖所需的最短行程。
9.例如,在只进行af或ois的情况下,目标行程为镜头和图像传感器处于初始位置时二者之间的距离与镜头和图像传感器处于目标位置时二者之间的距离之差。
10.本技术实施例提供的摄像头模组中,可以采用镜组致动器驱动镜头、微机电系统致动器驱动图像传感器,可以实现镜头与图像传感器组合运动进行自动对焦和光学防抖的效果,能够提高ois防抖角度,提升ois和af的精度和响应速度。
11.进一步地,ois防抖角度的提高能够提升远距离的拍照和视频成像质量。af精度的提升能够提高af马达的重复精度,提升拍照成片率。af响应速度的提升能够提升af马达远近焦对焦速度,提升高帧率视频拍摄的流畅度。
12.结合第一方面,在一种可能的实现方式中,所述第一目标方向与所述第二目标方向的方向相反。
13.换句话说,所述镜组移动控制部控制所述镜头运动的方向与所述图像传感器移动控制部控制所述图像传感器运动的方向相反。
14.结合第一方面,在一种可能的实现方式中,所述对焦信息包括以下信息的至少一项:所述镜头的初始位置,所述图像传感器的初始位置,所述图像传感器处于初始位置时获取的图像信息,所述镜头和所述图像传感器自动对焦时需要移动的行程总和。
15.应理解,这里所述的初始位置,指的是在自动对焦前镜头和图像传感器所处的位置。
16.结合第一方面,在一种可能的实现方式中,所述抖动信息包括以下信息的至少一项:所述镜头的初始位置,所述图像传感器的初始位置,所述摄像头模组的抖动角度,所述镜头和所述图像传感器光学防抖时需要补偿的角度总和,所述镜头和所述图像传感器光学防抖时需要移动的行程总和。
17.结合第一方面,在一种可能的实现方式中,所述镜组致动器具有第一af额定行程,所述mems致动器具有第二af额定行程,所述第二af额定行程小于所述第一af额定行程;在所述第二af额定行程大于或等于所述目标行程在所述光轴方向上的分量的情况下,所述第一行程信号用于指示所述镜头的行程为0,所述第二行程信号用于指示所述图像传感器的行程为所述目标行程在所述光轴方向上的分量;和/或,在所述第二af额定行程小于所述目标行程在所述光轴方向上的分量的情况下,所述行程分配部用于根据所述第一af额定行程与所述第二af额定行程的比例分配所述镜头的行程和所述图像传感器的行程。
18.当第二af额定行程大于或等于目标行程在光轴方向上的分量(即目标af行程)的情况下,可以使镜组致动器静止,只运动mems致动器,mems致动器精度高、响应速度快,能够提升af的响应速度和对焦精度。特别在视频远近焦切换时,镜组af致动器位置固定,仅使用
mems致动器移动图像传感器,可提升远近焦切换速度,可适应常用焦段在例如30帧或60帧或更高帧视频的流畅对焦及对焦帧内清晰度的需求。
19.在第二af额定行程小于目标行程在光轴方向上的分量(即目标af行程)的情况下,可以使镜组致动器和mems致动器均运动,例如同步运动或分步运动,镜组致动器以大步进进行粗调,mems致动器以小步进进行微调。例如在微距拍摄,或者整个光学系统的高度超过了mems致动器的af额定行程等场景下,可以控制镜组致动器和mems致动器均运动。当然这种运动组合方式可以适用于任何场景,不限定第二af额定行程小于目标行程的情况。
20.在镜组致动器的基础上增加mems致动器,能够延长af行程,提升微距能力。换句话说,组合镜组致动器的长行程能力与mems致动器的高精度、高响应速度,能够进行快速对焦和精准微调,达到较好的微距能力。
21.结合第一方面,在一种可能的实现方式中,所述镜组致动器具有第一af额定行程,所述第一af额定行程包括多个固定行程值,所述第一目标方向和所述第二目标方向为为所述光轴方向;所述第一行程信号用于指示所述镜头的行程为所述多个固定行程值中的第一固定行程值,所述第二行程信号用于指示所述图像传感器的行程为所述目标行程与所述第一固定行程值之差。
22.组合镜组致动器的长行程能力与mems致动器的高精度、高响应速度,可以进行分档位自动对焦或温漂补偿。
23.结合第一方面,在一种可能的实现方式中,所述镜组致动器具有第一ois额定行程,所述mems致动器具有第二ois额定行程;所述行程分配部用于根据所述第一ois额定行程与所述第二ois额定行程的比例分配所述镜头的行程和所述图像传感器的行程。
24.组合镜组致动器和mems致动器带动镜组与图像传感器运动,可以增大ois角度补偿。特别地,在镜组致动器与mems致动器的额定行程均等的情况下,本技术实施例提供的摄像头模组可以实现双倍于常规镜组ois马达的ois角度补偿。例如,常规马达的ois马达的ois角度约为0.7
°
,本技术实施例提供的摄像头模组能够将ois角度提升至1.5
°‑2°
,能够满足用户在手持电子设备拍摄时,常规小幅度运动状态下所需的防抖角度。另外,由于mems致动器的精度和响应速度较高,因此在实现ois时,可以提升ois的精度和响应速度。
25.结合第一方面,在一种可能的实现方式中,还包括:镜组位置反馈部,用于检测所述镜头的位置,并将所述镜头的位置信息反馈给所述行程分配部。
26.形成反馈系统,用于闭环反馈。
27.结合第一方面,在一种可能的实现方式中,还包括:图像传感器位置反馈部,用于检测所述图像传感器的位置,并将所述图像传感器的位置信息反馈给所述行程分配部。
28.形成反馈系统,用于闭环反馈。
29.结合第一方面,在一种可能的实现方式中,还包括:与所述图像传感器相连接的线路板,其中,所述图像传感器固定于所述mems致动器之上,所述图像传感器通过导线与所述线路板电连接;或者,所述线路板包括固定线路板部分和可动线路板部分,所述可动线路板部分设置于所述图像传感器与所述mems致动器之间,所述图像传感器通过所述可动线路板部分与所述mems致动器相连,所述图像传感器与所述可动线路板部分通过导线电连接,所述可动线路板部分与所述固定线路板部分通过导线电连接;或者,所述线路板包括固定线路板部分和可动线路板部分,所述可动线路板部分设置于所述图像传感器与所述mems致动
器之间,所述图像传感器通过所述可动线路板部分与所述mems致动器相连,所述图像传感器与所述可动线路板部分通过导线电连接,所述可动线路板部分为柔性电路板。
30.在实际应用中,选择加长的活动导线,可以减少活动导线在移动过程中的应力集中,延长摄像头模组的使用寿命。
31.可选地,导线可以为金线。
32.结合第一方面,在一种可能的实现方式中,所述mems致动器包括:定子;相对于所述定子可运动的动子;用于连接所述定子和所述动子的弹簧臂;所述定子与所述动子之间设置有在力的作用下可发生形变的阻尼胶,所述阻尼胶用于连接所述定子与所述弹簧臂,和/或连接所述动子与所述弹簧臂。
33.本技术实施例通过优化mems致动器的结构,在mems致动器内部动子与定子之间点阻尼胶,当动子相对于定子运动时,阻尼胶在力的作用下发生形变,可以减少弹簧臂在遭受冲击力例如在跌落、撞击等过程中的晃动,降低弹簧臂撞壁和折断风险,提升了mems致动器的可靠性。
34.阻尼胶能提供mems致动器在平移方向上的运动的阻尼,可以使系统快速稳定,降低响应时间,提升mems致动器的ois和af性能。
35.结合第一方面,在一种可能的实现方式中,所述阻尼胶的覆盖区域包括第一表面,所述第一表面为凹凸不平状,其中所述第一表面包括以下至少一项:所述定子与所述阻尼胶相接触的表面,所述动子与所述阻尼胶相接触的表面,所述弹簧臂与所述阻尼胶相接触的表面。
36.本技术实施例中,与阻尼胶相接触的表面设置为凹凸不平的形状,可以增大阻尼胶与粘接面的接触面积,提高阻尼胶的粘接可靠性。
37.结合第一方面,在一种可能的实现方式中,所述第一表面的截面形状包括以下形状的至少一种:矩形,弧形,梯形,三角形,自由曲线形。
38.结合第一方面,在一种可能的实现方式中,所述阻尼胶的覆盖面积不小于第一阈值,且不大于第二阈值,其中,所述第一阈值是根据所述阻尼胶的材质和与所述阻尼胶相接触的表面的属性确定的,所述第二阈值是根据所需要的阻尼值和所述阻尼胶所产生的阻力确定的。
39.阻尼胶覆盖的最小面积应能满足阻尼胶不容易掉落,阻尼胶覆盖的最大面积应能满足阻尼胶对弹簧臂的运动没有明显影响。
40.结合第一方面,在一种可能的实现方式中,所述阻尼胶设置于所述弹簧臂的中间位置对应的区域;和/或,所述阻尼胶设置于所述弹簧臂与所述定子相连接的位置对应的区域。
41.当阻尼胶点在弹簧臂的中间位置时,可以阻止运动系统过分晃动。
42.结合第一方面,在一种可能的实现方式中,所述定子包括定子主体、设置于所述定子主体上的固定梳齿;所述动子包括动子主体、设置于所述动子主体上的可动梳齿、限位件,所述限位件与所述动子主体通过连接件相连接,所述可动梳齿与所述固定梳齿呈叉指结构,所述可动梳齿相对于所述固定梳齿可沿叉指方向运动;所述定子主体上设有第一开孔,所述第一开孔用于所述连接件穿过,使得所述限位件和所述动子主体分别位于所述定子主体两侧;所述限位件在第一方向上的尺寸大于所述第一开孔在所述第一方向上的尺
寸,当所述可动梳齿相对于所述固定梳齿运动时,所述限位件用于限制所述可动梳齿与所述固定梳齿始终处于交错状态。
43.限位件可以保证mems致动器的可动梳齿与固定梳齿始终处于交错状态而不会完全脱离,能够防止在跌落冲击的过程中,mems致动器的动子脱出再复位时的梳齿撞击风险。
44.结合第一方面,在一种可能的实现方式中,所述叉指方向与所述动子主体所在平面平行,所述第一开孔在第二方向上与所述连接件之间的间隙小于预设值,且小于所述第一开孔在所述叉指方向上与所述连接件之间的间隙,其中所述第二方向为垂直于所述叉指方向的方向。
45.这样可以利用第一开孔在该第二方向上的间隙来对连接件的运动进行限位,能够防止弹簧臂和动子上的可动梳齿等部件直接撞击到摄像头模组的外壳上。
46.结合第一方面,在一种可能的实现方式中,所述动子包括与所述动子主体相连的突出部,所述突出部从所述动子主体伸出并沿所述叉指方向延伸,所述突出部与所述弹簧臂设置于所述动子主体的同一侧。
47.突出部可以在mems致动器遭受大冲击时,与定子主体相接触,以避免弹簧臂发生较大变形而断裂。
48.结合第一方面,在一种可能的实现方式中,还包括:外壳,所述外壳用于收容所述动子、所述定子和所述弹簧臂;所述外壳的内侧表面设置有限位块,所述限位块用于限制所述动子的运动范围。
49.限位块可以限制mems致动器的动子运动时脱出,提升mems致动器的可靠性。
50.当限位件与限位块均设置的情况下,限位件与限位块可以结合使用,实现多级限位,多级缓冲。具体而言,由于限位块是设置在外壳上的部件,其制造公差较大,限位块属于模组级限位。而限位件一般使用mems技术制备,制造公差小,属于马达级限位。另外,限位件与限位块联合使用时,还可以避免单独使用其中一个限位器限位时引起的应力集中的问题。
51.结合第一方面,在一种可能的实现方式中,所述外壳与所述动子之间设置有阻尼胶。
52.设置的阻尼胶的作用与在动子与定子之间设置的阻尼胶的作用类似,也用于提供阻尼值,防止动子过度震荡,降低响应的稳定时间。
53.第二方面,提供了一种摄像头模组,包括:镜头和镜组致动器,所述镜组致动器用于驱动所述镜头沿第一目标方向运动,其中所述第一目标方向包括光轴方向和/或垂直于光轴的方向;图像传感器和微机电系统mems致动器,所述mems致动器用于驱动所述图像传感器沿第二目标方向运动,所述第二目标方向包括光轴方向和/或垂直于光轴的方向;其中,所述mems致动器包括:定子;相对于所述定子可运动的动子,所述动子与所述图像传感器相连接;用于连接所述定子和所述动子的弹簧臂;所述定子与所述动子之间设置有在力的作用下可发生形变的阻尼胶,所述阻尼胶用于连接所述定子与所述弹簧臂,和/或连接所述动子与所述弹簧臂。
54.本技术实施例提供的摄像头模组中,可以采用镜组致动器驱动镜头、微机电系统致动器驱动图像传感器,可以实现镜头与图像传感器组合运动进行自动对焦和光学防抖的效果,能够提高ois防抖角度,提升ois和af的精度和响应速度。
55.另外,mems致动器内部动子与定子之间设置有阻尼胶,当动子相对于定子运动时,阻尼胶在力的作用下发生形变,可以减少弹簧臂在遭受冲击力例如在跌落、撞击等过程中的晃动,降低弹簧臂撞壁和折断风险,提升了mems致动器的可靠性。
56.此外,阻尼胶能提供mems致动器在平移方向上的运动的阻尼,可以使系统快速稳定,降低响应时间,提升mems致动器的ois和af性能。
57.结合第二方面,在一种可能的实现方式中,所述阻尼胶的覆盖区域包括第一表面,所述第一表面为凹凸不平状,其中所述第一表面包括以下至少一项:所述定子与所述阻尼胶相接触的表面,所述动子与所述阻尼胶相接触的表面,所述弹簧臂与所述阻尼胶相接触的表面。
58.结合第二方面,在一种可能的实现方式中,所述第一表面的截面形状包括以下形状的至少一种:矩形,弧形,梯形,三角形,自由曲线形。
59.结合第二方面,在一种可能的实现方式中,所述阻尼胶的覆盖面积不小于第一阈值,且不大于第二阈值,其中,所述第一阈值是根据所述阻尼胶的材质和与所述阻尼胶相接触的表面的属性确定的,所述第二阈值是根据所需要的阻尼值和所述阻尼胶所产生的阻力确定的。
60.结合第二方面,在一种可能的实现方式中,所述阻尼胶设置于所述弹簧臂的中间位置对应的区域;和/或,所述阻尼胶设置于所述弹簧臂与所述定子相连接的位置对应的区域。
61.结合第二方面,在一种可能的实现方式中,所述定子包括定子主体、设置于所述定子主体上的固定梳齿;所述动子包括动子主体、设置于所述动子主体上的可动梳齿、限位件,所述限位件与所述动子主体通过连接件相连接,所述可动梳齿与所述固定梳齿呈叉指结构,所述可动梳齿相对于所述固定梳齿可沿叉指方向运动;所述定子主体上设有第一开孔,所述第一开孔用于所述连接件穿过,使得所述限位件和所述动子主体分别位于所述定子主体两侧;所述限位件在第一方向上的尺寸大于所述第一开孔在所述第一方向上的尺寸,当所述可动梳齿相对于所述固定梳齿运动时,所述限位件用于限制所述可动梳齿与所述固定梳齿始终处于交错状态。
62.结合第二方面,在一种可能的实现方式中,所述叉指方向与所述动子主体所在平面平行,所述第一开孔在第二方向上与所述连接件之间的间隙小于预设值,且小于所述第一开孔在所述叉指方向上与所述连接件之间的间隙,其中所述第二方向为垂直于所述叉指方向的方向。
63.结合第二方面,在一种可能的实现方式中,所述动子包括与所述动子主体相连的突出部,所述突出部从所述动子主体伸出并沿所述叉指方向延伸,所述突出部与所述弹簧臂设置于所述动子主体的同一侧。
64.结合第二方面,在一种可能的实现方式中,所述mems致动器还包括外壳,所述外壳用于收容所述动子、所述定子、所述弹簧臂和所述图像传感器;所述外壳的内侧表面设置有限位块,所述限位块用于限制所述动子的运动范围。
65.结合第二方面,在一种可能的实现方式中,所述外壳与所述动子之间设置有阻尼胶。
66.第三方面,提供了一种微机电系统mems致动器,包括:定子;相对于所述定子可运
动的动子;用于连接所述定子和所述动子的弹簧臂;所述定子与所述动子之间设置有在力的作用下可发生形变的阻尼胶,所述阻尼胶用于连接所述定子与所述弹簧臂,和/或连接所述动子与所述弹簧臂。
67.本技术实施例通过优化mems致动器的结构,在mems致动器内部动子与定子之间点阻尼胶,当动子相对于定子运动时,阻尼胶在力的作用下发生形变,可以减少弹簧臂在遭受冲击力例如在跌落、撞击等过程中的晃动,降低弹簧臂撞壁和折断风险,提升了mems致动器的可靠性。
68.阻尼胶能提供mems致动器在平移方向上的运动的阻尼,可以使系统快速稳定,降低响应时间,提升mems致动器的ois和af性能。
69.结合第三方面,在一种可能的实现方式中,所述阻尼胶的覆盖区域包括第一表面,所述第一表面为凹凸不平状,其中所述第一表面包括以下至少一项:所述定子与所述阻尼胶相接触的表面,所述动子与所述阻尼胶相接触的表面,所述弹簧臂与所述阻尼胶相接触的表面。
70.结合第三方面,在一种可能的实现方式中,所述第一表面的截面形状包括以下形状的至少一种:矩形,弧形,梯形,三角形,自由曲线形。
71.结合第三方面,在一种可能的实现方式中,所述阻尼胶的覆盖面积不小于第一阈值,且不大于第二阈值,其中,所述第一阈值是根据所述阻尼胶的材质和与所述阻尼胶相接触的表面的属性确定的,所述第二阈值是根据所需要的阻尼值和所述阻尼胶所产生的阻力确定的。
72.结合第三方面,在一种可能的实现方式中,所述阻尼胶设置于所述弹簧臂的中间位置对应的区域;和/或,所述阻尼胶设置于所述弹簧臂与所述定子相连接的位置对应的区域。
73.结合第三方面,在一种可能的实现方式中,所述定子包括定子主体、设置于所述定子主体上的固定梳齿;所述动子包括动子主体、设置于所述动子主体上的可动梳齿、限位件,所述限位件与所述动子主体通过连接件相连接,所述可动梳齿与所述固定梳齿呈叉指结构,所述可动梳齿相对于所述固定梳齿可沿叉指方向运动;所述定子主体上设有第一开孔,所述第一开孔用于所述连接件穿过,使得所述限位件和所述动子主体分别位于所述定子主体两侧;所述限位件在第一方向上的尺寸大于所述第一开孔在所述第一方向上的尺寸,当所述可动梳齿相对于所述固定梳齿运动时,所述限位件用于限制所述可动梳齿与所述固定梳齿始终处于交错状态。
74.结合第三方面,在一种可能的实现方式中,所述叉指方向与所述动子主体所在平面平行,所述第一开孔在第二方向上与所述连接件之间的间隙小于预设值,且小于所述第一开孔在所述叉指方向上与所述连接件之间的间隙,其中所述第二方向为垂直于所述叉指方向的方向。
75.结合第三方面,在一种可能的实现方式中,所述动子包括与所述动子主体相连的突出部,所述突出部从所述动子主体伸出并沿所述叉指方向延伸,所述突出部与所述弹簧臂设置于所述动子主体的同一侧。
76.结合第三方面,在一种可能的实现方式中,还包括:外壳,所述外壳用于收容所述动子、所述定子和所述弹簧臂;所述外壳的内侧表面设置有限位块,所述限位块用于限制所
述动子的运动范围。
77.结合第三方面,在一种可能的实现方式中,所述外壳与所述动子之间设置有阻尼胶。
78.第四方面,提供了一种图像传感器组件,包括:外壳、图像传感器和mems致动器,所述外壳用于收容所述图像传感器和所述mems致动器,所述mems致动器用于带动所述图像传感器运动,其中,所述mems致动器包括:定子;相对于所述定子可运动的动子,所述动子与所述图像传感器相连接;用于连接所述定子和所述动子的弹簧臂;所述定子与所述动子之间设置有在力的作用下可发生形变的阻尼胶,所述阻尼胶用于连接所述定子与所述弹簧臂,和/或连接所述动子与所述弹簧臂。
79.本技术实施例通过优化mems致动器的结构,在mems致动器内部动子与定子之间点阻尼胶,当动子相对于定子运动时,阻尼胶在力的作用下发生形变,可以减少弹簧臂在遭受冲击力例如在跌落、撞击等过程中的晃动,降低弹簧臂撞壁和折断风险,提升了mems致动器的可靠性。
80.阻尼胶能提供mems致动器在平移方向上的运动的阻尼,可以使系统快速稳定,降低响应时间,提升mems致动器的ois和af性能。
81.结合第四方面,在一种可能的实现方式中,所述阻尼胶的覆盖区域包括第一表面,所述第一表面为凹凸不平状,其中所述第一表面包括以下至少一项:所述定子与所述阻尼胶相接触的表面,所述动子与所述阻尼胶相接触的表面,所述弹簧臂与所述阻尼胶相接触的表面。
82.结合第四方面,在一种可能的实现方式中,所述第一表面的截面形状包括以下形状的至少一种:矩形,弧形,梯形,三角形,自由曲线形。
83.结合第四方面,在一种可能的实现方式中,所述阻尼胶的覆盖面积不小于第一阈值,且不大于第二阈值,其中,所述第一阈值是根据所述阻尼胶的材质和与所述阻尼胶相接触的表面的属性确定的,所述第二阈值是根据所需要的阻尼值和所述阻尼胶所产生的阻力确定的。
84.结合第四方面,在一种可能的实现方式中,所述阻尼胶设置于所述弹簧臂的中间位置对应的区域;和/或,所述阻尼胶设置于所述弹簧臂与所述定子相连接的位置对应的区域。
85.结合第四方面,在一种可能的实现方式中,所述定子包括定子主体、设置于所述定子主体上的固定梳齿;所述动子包括动子主体、设置于所述动子主体上的可动梳齿、限位件,所述限位件与所述动子主体通过连接件相连接,所述可动梳齿与所述固定梳齿呈叉指结构,所述可动梳齿相对于所述固定梳齿可沿叉指方向运动;所述定子主体上设有第一开孔,所述第一开孔用于所述连接件穿过,使得所述限位件和所述动子主体分别位于所述定子主体两侧;所述限位件在第一方向上的尺寸大于所述第一开孔在所述第一方向上的尺寸,当所述可动梳齿相对于所述固定梳齿运动时,所述限位件用于限制所述可动梳齿与所述固定梳齿始终处于交错状态。
86.结合第四方面,在一种可能的实现方式中,所述叉指方向与所述动子主体所在平面平行,所述第一开孔在第二方向上与所述连接件之间的间隙小于预设值,且小于所述第一开孔在所述叉指方向上与所述连接件之间的间隙,其中所述第二方向为垂直于所述叉指
镜组致动器;231-镜组af马达;232-镜组ois马达;240-图像传感器组件;241-滤光片;242-图像传感器;243-mems致动器;244-线路板;244a-固定线路板部分;244b-可动线路板部分;245-活动金线;201-镜头;202-图像传感器;203-镜组致动器;204-mems致动器;205-镜组移动控制部205;206-图像传感器移动控制部;207-行程分配部207;301-ap/isp;302-移动图像传感器的驱动ic;303-镜组af驱动ic;304-镜组af运动单元;305-升压ic;306-mems af运动单元;307-陀螺仪;308-镜组ois驱动ic;309-镜组ois运动单元;310-mems ois x-运动单元;311-mems ois x+运动单元;312-mems ois y-运动单元;313-mems ois y+运动单元;410-滤光片;420-图像传感器;430-mems马达;431-动子;4311-动子主体;4312-可动梳齿;4313-连接件;4314-限位件;432-定子;4321-定子主体;4322-固定梳齿;4323-基板;433-弹簧臂;4331-第一端;4332-第二端;4301-突出部;4302-第一开孔;4303-第二开孔;440-阻尼胶。
具体实施方式
112.下面将结合附图,对本技术中的技术方案进行描述。
113.本技术实施例中,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。
114.本技术实施例的描述中,术语“上”、“下”、“左”、“右”、“水平”、“垂直”等指示的方位或位置关系为相对于附图中的部件示意放置的方位或位置来定义的,应当理解到,这些方向性术语是相对的概念,它们用于相对于的描述和澄清,而不是指示或暗示所指的装置或元器件必须具有的特定的方位、或以特定的方位构造和操作,其可以根据附图中部件所放置的方位的变化而相应地发生变化,因此不能理解为对本技术的限定。
115.图1示出了本技术实施例提供的一种电子设备的示意图。
116.本技术实施例所涉及的电子设备100为具有成像功能的设备,例如可以包括手持设备、车载设备、可穿戴设备、计算设备或连接到无线调制解调器的其它处理设备。电子设备100还可以包括蜂窝电话(cellular phone)、智能手机(smart phone)、个人数字助理(personal digital assistant,pda)电脑、平板型电脑、手提电脑、膝上型电脑(laptop computer)、机器类型通信(machine type communication,mtc)终端、销售终端(point of sales,pos)、摄像机、录像机、照相机、智能手表(smart watch)、智能手环(smart wristband)、车载电脑以及其他具有成像功能的电子设备等。
117.本技术实施例对电子设备100的具体形式不做特殊限制。以下为了方便说明和理解,是以电子设备100为终端设备例如手机为例进行的说明。示例性的,图1中的(a)和(b)分别示意性地示出了电子设备100的正面和背面。
118.如图1所示,电子设备100可以包括壳体101、显示屏(display panel,dp)102、摄像头模组(camera compact module,ccm)103。
119.壳体101形成有容纳空间,用于收容电子设备100的元器件。壳体101还可以起到保护电子设备100和支撑整机的作用。显示屏102和摄像头模组103设置于壳体101的容纳空间中,并与壳体101相连接。在一些实施例中,壳体101包括与显示屏102相对设置的后盖和设置于电子设备内部的中框,显示屏102和摄像头模组103可以固定于中框上。壳体101的材质
可以是金属的、塑料的、陶瓷的或者玻璃的。
120.显示屏102可以为液晶显示(liquid crystal display,lcd)屏、有机发光二极管(organic light emitting diode,oled)显示屏等,其中oled显示屏可以为柔性显示屏或硬质显示屏。显示屏102可以是普通的规则屏幕,也可以为异形屏幕、折叠屏幕等,例如显示屏102可折叠形成弧形、多棱柱等等。显示屏102可以设置于电子设备100的正面和/或背面。电子设备100的正面可以理解为用户使用该电子设备100时面向用户的一侧,电子设备100的背面可以理解为用户使用电子设备100时背向用户的一侧。
121.摄像头模组103用于捕获静态图像或视频。摄像头模组103设置于电子设备100的正面时,可用于拍摄位于电子设备100正面一侧的景象,在一些实施例中可以称之为前置摄像头。摄像头模组103设置于电子设备100的背面时,可用于拍摄位于电子设备100背面一侧的景象,在一些实施例中可以称之为后置摄像头。在拍摄时用户可以根据拍摄需求选择相应的摄像头模组。摄像头模组103可以用于拍摄不同距离例如远处、近处或微距的景象,本技术实施例不作特殊限定。
122.摄像头模组103可以为直立式模组,也可以为折叠式模组。直立式摄像头模组可以理解为进入摄像头模组的光线是直接打到图像传感器上,光路没有发生弯折。折叠式摄像头模组可以理解为进入摄像头模组的光线需要经过反射镜、透镜、棱镜等元件才能打到图像传感器上,光路发生折叠。折叠式摄像头模组也可以称为潜望式摄像头模组。
123.摄像头模组103可以为长焦摄像头模组,也可以为广角摄像头模组,还可以为主摄摄像头模组。
124.应理解,图1中摄像头模组103的安装位置仅仅是示意性的。摄像头模组103作为前置摄像头时,可以安装于电子设备100的正面上除显示屏102之外的任意位置,例如听筒的左侧、电子设备100的上部中间、电子设备100的下部(或称下巴)或者电子设备100的四个角落等。摄像头模组103还可以设置于显示屏102上的挖空区域。摄像头模组103作为后置摄像头时,可以安装于电子设备100背面的任意位置上,例如左上角或右上角。在其他一些实施例中,摄像头模组103还可以不设置在电子设备100的主体上,而设置在相对电子设备100的主体突出的边缘上,或者设置于相对电子设备100可移动或转动的部件上,其中该部件可以从电子设备100的主体上伸缩或旋转等。当摄像头模组103相对电子设备100可以旋转时,摄像头模组103相当于前置摄像头和后置摄像头,即通过旋转同一个摄像头模组103既可以拍摄位于电子设备100正面一侧的景象,也可以拍摄位于电子设备100背面一侧的景象。在另一些实施例中,当显示屏101可以折叠时,摄像头模组103可以随着显示屏102的折叠作为前置摄像头或作为后置摄像头。
125.本技术实施例对摄像头模组103的设置个数不作限定,可以是一个、两个、四个甚至更多,例如可以在电子设备100正面设置一个或多个摄像头模组103,和/或在电子设备100背面设置一个或多个摄像头模组103。当设置多个摄像头模组103时,该多个摄像头模组103可以是完全相同的,也可以是不同的,例如该多个摄像头模组103的透镜光学参数不同,透镜的设置位置不同,透镜的形态不同等。本技术实施例对多个摄像头模组设置时的相对位置也不作任何限定。
126.可选地,电子设备100还可以包括用于保护摄像头模组103的保护镜片104。保护镜片104设置于壳体101上,并覆盖摄像头模组103。保护镜片104用于保护前置摄像头时,保护
镜片104可以只覆盖前置摄像头模组或覆盖电子设备100的整个正面。其中当保护镜片104覆盖电子设备100的整个正面时,可用于同时保护前置摄像头模组和显示屏102,保护镜片104即为盖板玻璃(cover glass,cg)。保护镜片104用于保护后置摄像头时,保护镜片104可以覆盖电子设备100的整个背面,也可以只设置于后置摄像头模组对应的位置上。保护镜片104的材质可以是玻璃、蓝宝石、陶瓷等,本技术实施例不作特殊限定。在一些实施例中,保护镜片104为透明的,电子设备100外部的光线能够通过保护镜片104进入摄像头模组103中。
127.应理解,图1中示意的结构并不构成对电子设备100的具体限定,电子设备100可以包括比图示更多或更少的部件,例如电子设备100还可以包括电池、闪光灯、指纹识别模组、听筒、按键、传感器等元器件中的一种或多种,电子设备100也可以设置与图示不同的部件布置方式。
128.随着电子设备技术的不断发展和设备功能的不断扩展,目前的电子设备例如手机、平板电脑等都能够为用户提供拍照或录像功能。与此同时,用户对于电子设备的拍摄质量的要求也在不断提高,对于多种拍摄场景的需求愈发普遍。
129.例如,用户在手持电子设备拍摄时,由于手的抖动和身体的运动,会导致画面抖动、成像模糊。虽然可以通过电子防抖(electronics image stabilization,eis)和人工智能防抖(artificial intelligence image stabilization,ais)剪裁边缘,实现整体图像的稳定,但无法解决成像模糊的问题。目前实现ois所采用的音圈马达或形状记忆合金马达的行程有限,例如音圈马达的行程受限于电磁力、可靠性和模组尺寸等的制约,形状记忆合金马达的行程受限于线长收缩率、结构尺寸等的制约,都很难实现更大角度的ois行程需求。因此,需要更大角度的ois系统,以提高ois防抖角度,提升远距离的拍照和视频成像质量。
130.又如,当前马达的对焦重复精度低,致使成像偶尔存在边角、背景的清晰度不稳定的现象,成片率较低。因此,需要提升马达的对焦重复精度,以提升对焦主体与背景清晰度的一致性,提升拍照成片率。
131.再如,当前马达的对焦稳定时间(settling time)基本满足30帧视频的要求,但对于更高帧数例如60帧视频来说,由于单帧时间变短,当前的对焦稳定时间会影响对焦流畅度和对焦速度,存在对焦速度慢、对焦帧内图像模糊的现象,影响用户体验。因此需要提升马达的远近焦的对焦速度,以提升高帧率视频拍摄的流畅度。应理解,马达的对焦稳定时间可以理解为马达接收信号开始运动到停下来的时间,这里马达停下来指的是马达在指定位置的抖动不超过预设抖动范围。
132.本技术实施例提供一种摄像头模组,能够满足上述要求。图2示出了本技术实施例提供的一种摄像头模组的示意性爆炸图。图3示出了图2中的摄像头模组的示意性剖面图。图2中的摄像头模组200可以是图1中的摄像头模组103的一种示例性结构。下面结合图2和图3对摄像头模组200的结构做简要介绍。
133.为方便描述,以下定义摄像头模组200的光轴方向为z方向,光轴方向上的被摄物体方向侧为前侧,与被摄物体相背的方向侧为后侧。垂直于光轴的第一方向为x方向,垂直于光轴和第一方向的第二方向为y方向。在一些实施例中,x方向和y方向也可以称为面内方向,z方向可以称为面外方向。本技术实施例中,光轴方向为光学系统传导光线的方向。对于
对称透射系统而言,光轴一般与光学系统旋转中心线重合。
134.这里,x、y、z方向和前、后、面内、面外的定义同样适用于后文将要描述的各幅附图。需要说明的是,上述对x、y、z方向和前、后、面内、面外的定义仅仅是为了方便描述本技术实施例中的各零部件之间的位置关系、连接关系和运动关系,不应理解为对本技术实施例的限定。
135.如图2和3所示,摄像头模组200可以包括外壳210、镜头组件220、镜组致动器230和图像传感器组件240。
136.镜头组件220也可以称为镜组,主要包括光学镜头221和镜筒222。镜头组件220用于将物侧的景物成像于像侧的成像面上。
137.光学镜头221(也可以简称为镜头)可以包括至少一个透镜,该至少一个透镜可以是不同的,也可以是相同的。该至少一个透镜可以包括固体透镜和/或液体透镜。其中固体透镜可以是用透明物质例如塑胶(plastic)、玻璃(glass)制成的表面为球面或非球面的自由曲面一部分的光学元件,其具有固定的透镜参数。液体透镜是一种使用一种或多种液体制成的无机械连接的光学元件,其透镜参数可以通过外部控制实现动态调整。本技术实施例中对光学镜头221包括的透镜个数不作具体限定,本领域技术人员可以根据实际需求相应设置透镜个数,例如1个、2个、3个、5个、8个或者更多,也可以根据实际需求设置固体透镜和/或液体透镜的组合方式,在此不作更多描述。
138.光学镜头221的焦距可以是固定的,则镜头组件220为定焦镜头。光学镜头221的焦距也可以进行调节,则镜头组件220为变焦镜头。在一些实施例中,可以通过调整光学镜头221的各透镜之间的相对位置、调整液体透镜的折射率、改变液体透镜的表面形状(曲率)等可以实现光学镜头221的焦距的调节。
139.镜筒222形成有容纳空间,主要用于收容光学镜头221。镜筒222可以是一个整体,光学镜头221收容于该整体的镜筒222中,但光学镜头221的透镜之间的相对位置可以通过其他的结构进行调整。镜筒222也可以包括多个镜筒部分,光学镜头221的透镜分组设置于该多个镜筒部分中,该多个镜筒部分之间的相对位置可以进行调整,从而实现透镜之间的相对位置的调整。因此应理解,图2和图3中的镜筒222的结构、光学镜头221与镜筒222的连接方式等仅仅是示例性的,对本技术实施例不造成任何限定。
140.镜组致动器230用于带动镜头组件220运动,以实现自动对焦和/或光学防抖。自动对焦(auto focus,af)是利用被摄物体的光反射原理,将被摄物体反射的光经过镜头后在图像传感器上成像及接收,通过计算机处理后,带动电动对焦装置进行对焦。光学防抖(optical image stabilization,ois)是指在成像仪器例如手机或照相机中,通过光学元器件的设置,来避免或者减少捕捉光学信号过程中出现的仪器抖动现象,以提高成像质量。通常的一种做法是通过陀螺仪(gyro)做抖动检测,然后通过ois马达反方向平移或旋转整个镜头,补偿曝光期间因成像仪器抖动引起的图像模糊。
141.镜组致动器230也可以称为镜组马达。如图3所示,镜组致动器230主要包括用于移动镜组进行af的马达(以下简称镜组af马达)231和用于移动镜组进行ois的马达(以下简称镜组ois马达)232。具体地,镜组af马达231用于移动镜头组件220在z方向上进行自动对焦,镜组ois马达232用于移动镜头组件220在x方向或y方向上进行光学防抖。镜组af马达231与镜组ois马达232可以是两个独立的部件,分别独立带动镜头组件220进行af和ois。镜组af
马达231与镜组ois马达232也可以是同一个部件,该一个部件既可以带动镜头组件220进行af,也可以带动镜头组件220进行ois。图3示例性示出了镜组致动器230包括独立的镜组af马达231和镜组ois马达232,但应理解,本技术实施例不限于此。
142.本技术实施例中,镜组af马达或镜组ois马达可以用于移动整个镜头组件220,也可以用于移动镜头组件220中的部分零部件。例如镜头组件220的一部分零部件固定,另一部分零部件可移动,或者,镜头组件220可以分为可移动多个部分,则镜组af马达或镜组ois马达可以带动可以移动的部分进行移动,以改变光路实现所需功能。
143.本技术实施例中,镜头组件220包括镜头,镜组致动器230驱动镜头组件220运动,也即镜组致动器230驱动镜头运动。
144.可选地,镜组af马达231可以为音圈马达(voice coil motor,vcm)、形状记忆合金(shape memory alloy,sma)马达、步进马达(stepping motor)、压电马达(piezoelectric motor)等。应理解,镜组af马达231的具体结构可以根据选择的驱动方式相应设计和选择,本技术实施例不作详细描述。
145.可选地,镜组ois马达232可以为音圈马达(voice coil motor,vcm)、形状记忆合金(shape memory alloy,sma)马达、步进马达(stepping motor)、压电马达(piezoelectric motor)等。应理解,镜组ois马达232的具体结构可以根据选择的驱动方式相应设计和选择,本技术实施例不作详细描述。
146.如图3所示,镜组af马达231与镜头组件220中的镜筒222相连接,在af过程中,镜组af马达231可以带动镜筒222沿光轴方向(即z向)上下运动,从而改变光学镜头221的光心到成像面的距离(即改变像距),以获得清晰的图像。应理解,图中仅示意性表示镜组af马达231所在的位置,对镜组af马达231的具体结构不造成任何限定。
147.如图3所示,镜组ois马达232与镜头组件220中的镜筒222相连接,在ois过程中,镜组ois马达232可以带动镜筒222沿垂直光轴方向(即x向和y向)运动,从而使光学镜头221的焦点偏离光轴,以获得清晰的图像。应理解,图中仅示意性地表示镜组ois马达232所在的位置,对镜组ois马达232的具体结构不造成任何限定。
148.镜组致动器230可用于带动镜头沿光轴方向运动进行自动对焦,也可以用于带动镜头在垂直光轴方向运动进行光学防抖。换句话说,镜组致动器230可用于驱动镜头沿目标方向运动,其中该目标方向包括光轴方向和/或垂直光轴的方向。图像传感器组件240设置于镜头组件220的后侧,主要用于成像。具体地,参考图3,传感器组件240可以包括滤光片241、图像传感器242、微机电系统(microelectromechanical systems,mems)致动器243、线路板244等。
149.滤光片241设置于图像传感器组件240上靠近镜头组件220的一侧。滤光片241用于消除投射到图像传感器242上的不必要的光线,防止图像传感器242在成像时出现鬼影、杂光和偏色等问题。滤光片241可以为红外截止滤光片或滤掉其他光波段的滤光片。
150.图像传感器242设置于mems致动器243之上,且与mems致动器243直接或间接相连。图像传感器242可在mems致动器243的带动下沿光轴方向运动和/或在垂直光轴方向运动。图像传感器242是一种半导体芯片,其表面包含有几十万到几百万的光电二极管,在受到光照射时会产生电荷,电荷通过模数转换器芯片可转换成数字信号。图像传感器242可以是电荷耦合元件(charge coupled device,ccd)图像传感器,也可以是互补金属氧化物半导体
元件(complementary metal-oxide semiconductor,cmos)图像传感器。
151.mems致动器243也可称为mems马达,用于带动图像传感器242运动,以实现自动对焦和/或光学防抖。具体地,在自动对焦过程中,mems马达243可以带动图像传感器242沿光轴上下运动;在光学防抖过程中,mems马达243可以带动图像传感器242沿垂直光轴方向运动。mems致动器243包括动子和定子(图中未示出),其中定子相对外壳210固定,动子相对定子可动。在自动对焦和光学防抖过程中,具体为mems致动器243的动子带动图像传感器242运动。
152.mems致动器243可用于带动图像传感器242沿光轴方向运动进行自动对焦,也可以用于带动图像传感器242在垂直光轴方向运动进行光学防抖。换句话说,mems致动器243可用于驱动图像传感器242沿目标方向运动,其中该目标方向包括光轴方向和/或垂直光轴的方向。
153.mems致动器243的驱动方式可以是静电力驱动、磁电驱动、压电驱动、热电驱动等。应理解,本领域技术人员可以根据所选择的驱动方式对mems致动器243的动子和定子的结构进行相应设计,在此不再一一详细描述。
154.本技术实施例中,mems致动器243使用微机电系统mems技术制造。微机电系统mems是一门综合学科,可基于微电子技术、集成电路技术及其加工工艺,在微米尺度级别实现常见的机械结构,如通道、孔、悬臂、膜、腔以及其它结构等。也就是说,mems致动器243的加工技术并非机械式的制造零件,然后组装,而是采用类似于集成电路批处理式的微制造技术,将驱动结构和电路均蚀刻在晶圆上。本技术实施例的mems致动器243具有质量轻、集成度高、响应速度快的优势,mems致动器243批量制造能显著降低大规模生产的成本。
155.线路板244用于传输电信号,可以是柔性电路板(flexible printed circuit,fpc)或印刷电路板(printed circuit board,pcb)。fpc可以是单面柔性板、双面柔性板、多层柔性板、刚柔性板或混合结构的柔性电路板等,本技术实施例不作限定。
156.图像传感器242可以通过导线例如活动金线与线路板244电连接,以实现信号的引出。
157.图4至图6示出了图像传感器242与线路板244之间的连接方式的示意图。具体地,图4至图6为图3中的摄像头模组200的示意性俯视图,为方便理解,图中未示出图像传感器242之上的元件。
158.作为一个示例,如图4所示,图像传感器242可以直接固定于mems致动器243(具体为mems致动器243的动子)上。图像传感器242可通过胶接、焊接等方式与mems致动器243机械连接。线路板244为固定的外围线路板,图像传感器242通过活动金线245电连接到线路板244上。
159.作为另一个示例,如图5所示,线路板244可以包括固定线路板部分244a和可动线路板部分244b,其中固定线路板部分244a为外围线路板,可动线路板部分244b设置于图像传感器242和mems致动器243之间。图像传感器242固定于可动线路板部分244b上,可动线路板部分244b固定于mems致动器243上。也就是说,图像传感器242通过可动线路板部分244b与mems致动器243相连接。图像传感器242与可动线路板部分244b之间、可动线路板部分244b与mems致动器243之间可以通过胶接或焊接方式机械连接。图像传感器242与可动线路板部分244b通过金线245电连接,可动线路板部分244b与固定线路板部分244a通过金线245
电连接。在实际装配过程中,需要打两次金线,第一次将金线从图像传感器242打到可动线路板部分244b上,第二次将金线从可动线路板部分244b打到固定线路板部分244a上。
160.作为又一个示例,如图6所示,线路板244可以包括固定线路板部分244a和可动线路板部分244b,其中固定线路板部分244a为外围线路板,可动线路板部分244b设置于图像传感器242和mems致动器243之间。图像传感器242与可动线路板部分244b之间、可动线路板部分244b与mems致动器243之间可以通过胶接或焊接方式机械连接。可动线路板部分244b为柔性电路板,其与固定线路板部分244a相连接。图像传感器242通过可动线路板部分244b与mems致动器243相连接,其中图像传感器242与可动线路板部分244b通过金线245电连接,可动线路板部分244b与固定线路板部分244a为一体式。随着图像传感器242的运动,可动线路板部分244b可以发生弯折形变,直接将从图像传感器242引入的信号导出到固定线路板部分244a。
161.活动金线245可以通过焊接方式固定于元件例如图像传感器242和线路板244上。活动金线245表面做镀层处理,可以避免触碰短路。
162.可选地,活动金线245的长度可以为2mm-4mm,或者大于4mm。
163.可选地,活动金线245可以布设在mems马达的结构层里,通过mems马达的弹簧臂将线路引导到外围线路板。
164.应理解,活动金线245的长度可以根据实际需求相应选择,不限于本技术实施例列举的长度范围。在实际应用中,选择加长的活动金线,可以减少活动金线在移动过程中的应力集中,延长摄像头模组的使用寿命。
165.还应理解,上述用于连接电子元件的金线还可以采用其他材料的导线,本技术实施例对此不作限定。
166.仍参考图2和图3,摄像头模组200的外壳210形成有内腔,用于收容镜头组件220、镜组致动器230和图像传感器组件240等。另外,外壳210也可以起到保护和支撑作用。应理解,图中外壳210的结构仅仅是示例性的,对本技术实施例不造成任何限定,本领域技术人员可以根据实际需要相应设计外壳210的形状。
167.可选地,摄像头模组200还可以包括连接器、以及周边电子元件等元件(图中未示出),在此不再一一详述。
168.本技术实施例提供的摄像头模组200中,采用镜组致动器230驱动镜头组件220、mems致动器243驱动图像传感器242,可以实现镜头组件220与图像传感器242组合运动进行自动对焦和光学防抖的效果,能够提高ois防抖角度,提升ois和af的精度和响应速度。
169.相应地,ois防抖角度的提高能够提升远距离的拍照和视频成像质量。af精度的提升能够提高af马达的重复精度,提升拍照成片率。af响应速度的提升能够提升af马达远近焦对焦速度,提升高帧率视频拍摄的流畅度。下面结合摄像头模组进行自动对焦和光学防抖时的控制流程进行详细说明。
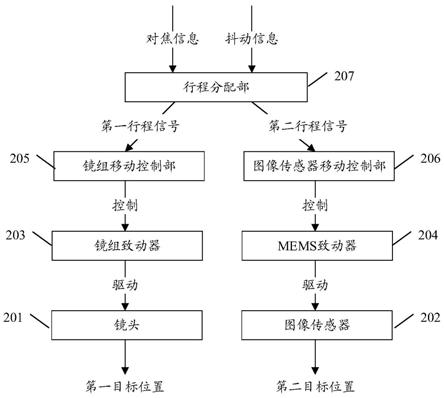
170.图7示出了本技术实施例提供的一种摄像头模组的示意性结构框图,该结构框图中还示出了摄像头模组进行自动对焦和光学防抖的控制过程。
171.如图7所示,该摄像头模组包括镜头201和镜组致动器203,该镜组致动器203用于驱动镜头201沿第一目标方向运动,其中该第一目标方向包括光轴方向和/或垂直于光轴的方向。这里镜头201可以是图3中光学镜头221,或者为图3中镜头组件220。镜组致动器203可
以为图3中的镜组致动器230。
172.摄像头模组还包括图像传感器202和mems致动器204,该mems致动器204用于驱动图像传感器202沿第二目标方向运动,第二目标方向包括光轴方向和/或垂直于光轴的方向。
173.也就是说,当自动对焦时,第一目标方向和第二目标方向为光轴方向,镜组致动器203可以驱动镜头201沿光轴方向运动进行自动对焦,mems致动器204也可以驱动图像传感器202沿光轴方向运动进行自动对焦。当光学防抖时,第一目标方向和第二目标方向为垂直光轴的方向,镜组致动器203可以驱动镜头201沿垂直光轴的方向运动进行光学防抖,mems致动器204也可以驱动图像传感器202沿垂直光轴的方向运动进行光学防抖。当然,当自动对焦和光学防抖同时进行时,第一目标方向可以为光轴方向,即镜组致动器203驱动镜头201沿光轴方向运动进行自动对焦,第二目标方向为垂直光轴的方向,即mems致动器204驱动图像传感器202沿垂直光轴的方向运动进行光学防抖。或者第一目标方向为垂直光轴的方向,第二目标方向为光轴方向,本技术实施例对此不作限定。
174.这里,图像传感器202可以是图3中的图像传感器242。mems致动器可以是图3中的mems致动器243。
175.摄像头模组还包括行程分配部207、镜组移动控制部205和图像传感器移动控制部206。其中行程分配部207用于将自动对焦和/或光学防抖所需的总行程(本技术实施例称为目标行程)分配给镜头201和图像传感器203。镜组移动控制部205则根据行程分配部207分配的行程控制镜组致动器203驱动镜头201移动到指定位置。同理,图像传感器移动控制部206则根据行程分配部207分配的行程控制mems致动器204驱动图像传感器202移动到指定位置。
176.需要说明的是,这里所涉及目标行程为摄像头模组进行af和/或ois所需的最短行程。在只进行af时,目标行程可以理解为自动对焦所需的最短行程,该目标行程为沿光轴方向的行程。在只进行ois时,目标行程可以理解为光学防抖所需的最短行程,该目标行程为沿垂直光轴方向的行程。在进行af和ois时,则目标行程在光轴方向上的分量为自动对焦所需的最短行程,目标行程在垂直于光轴的方向上的分量为光学防抖所需的最短行程。
177.具体地,行程分配部207可以根据对焦信息和/或抖动信息,确定第一行程信号和第二行程信号,其中第一行程信号用于指示镜头201进行自动对焦af和/或光学防抖ois时的第一行程,第二行程信号用于指示图像传感器202进行af和/或ois时的第二行程。这里,第一行程在光轴方向上的分量(也可以称为第一af行程)与第二行程在光轴方向上的分量(也可以称为第二af行程)之和等于目标行程在光轴方向上的分量(也可以称为目标af行程),第一行程在垂直于光轴的方向上的分量(也可以称为第一ois行程)与第二行程在垂直于光轴的方向上的分量(也可以称为第二ois行程)之和等于目标行程在所述垂直于光轴的方向上的分量(也可以称为目标ois行程)。
178.第一行程信号可以有多种形式,例如可以是镜头201需要移动的距离,或者是镜头201需要到达的位置。
179.第二行程信号可以有多种形式,例如是图像传感器202需要移动的距离,或者是图像传感器202需要达到的位置。
180.应理解,在自动对焦时,行程分配部207可以根据对焦信息确定第一行程信号和第
二行程信号,其中第一行程信号用于指示镜头201实现自动对焦时的第一行程(即第一af行程),第二行程信号用于指示图像传感器202实现自动对焦时的第二行程(即第二af行程)。
181.对焦信息可以包括以下信息的至少一项:镜头201的初始位置,图像传感器202的初始位置,图像传感器202处于初始位置时获取的图像信息,镜头201和图像传感器202自动对焦时需要移动的行程总和(即目标行程)。应理解,这里所述的初始位置,指的是在自动对焦前镜头201和图像传感器202所处的位置。
182.应理解,在光学防抖时,行程分配部207可以根据防抖信息确定第一行程信号和第二行程信号,其中第一行程信号用于指示镜头201实现光学防抖时的第一行程(即第一ois行程),第二行程信号用于指示图像传感器202实现光学防抖时的第二行程(即第二ois行程)。
183.防抖信息可以包括以下信息的至少一项:镜头201的初始位置,图像传感器202的初始位置,摄像头模组的抖动角度(或者应用摄像头模组的电子设备的抖动角度),镜头201和图像传感器202光学防抖时需要补偿的角度总和,镜头201和图像传感器202光学防抖时需要移动的行程总和(即目标行程)。这里,光学防抖的补偿角度与平移行程可以通过公式相互转换。补偿角度与平移行程之间的关系为:平移行程=efl*sinβ,efl为等效焦距(equivalent focal length,efl),β为补偿角度,补偿角度等于抖动角度。通过等效焦距efl和补偿角度β,可以得到平移行程。
184.行程分配部207可以是同一个部件应用于af和ois中,也可以包括两个部件,该两个部件分别应用于af和ois。镜组移动控制部205可以是同一个部件应用于af和ois中控制镜组致动器203,也可以包括两个部件,该两个部件分别应用于af和ois中控制镜组致动器203。图像传感器移动控制部206可以是同一个部件应用于af和ois中控制mems致动器204,也可以包括两个部件,该两个部件分别应用于af和ois中控制mems致动器204,本技术实施例对此均不作限定。行程分配部207分配行程的方式可以有多种。
185.以自动对焦为例,镜组致动器203具有第一af额定行程,mems致动器204具有第二af额定行程。
186.在一个示例中,在第二af额定行程大于或等于目标行程(具体为目标af行程)的情况下,第一行程信号可以用于指示镜头201的行程为0,第二行程信号可以用于指示图像传感器202的行程为目标行程。也就是说,在第二af额定行程大于或等于目标行程的情况下,可以控制镜头201不动,由图像传感器202运动进行自动对焦。这样的控制方式可以适用于视频拍摄场景、第二af额定行程能够覆盖拍摄所用焦段场景等。
187.在另一个示例中,在第二af额定行程小于目标行程(具体为目标af行程)的情况下,可以控制镜头201和图像传感器202同步运动或分步运动,且镜头201的行程大于0,图像传感器202的行程大于0。这样的控制方式可以适用于微距场景、拍照场景、整个光学系统的高度超过第二af额定行程场景等。
188.可选地,在镜头201与图像传感器202均参与af时,行程分配部207可以根据第一af额定行程与第二af额定行程的比例分配镜头201的行程和图像传感器202的行程。
189.可选地,在镜头201与图像传感器202均参与af时,第一af额定行程可以包括多个固定行程值,第一行程信号可以用于指示镜头的行程为该多个固定行程值中的第一固定行程值,第二行程信号可以用于指示图像传感器的行程为目标行程(具体为目标af行程)与第
一固定行程值之差。换句话说,行程分配部207可以控制镜头201为该多个固定行程值中的第一固定行程值,控制图像传感器202补足剩余行程。这种控制方式可以适用于镜组致动器粗调、图像传感器微调的场景。
190.再以光学防抖为例,镜组致动器203具有第一ois额定行程,mems致动器204具有第二ois额定行程。
191.在一个示例中,行程分配部207可以根据第一ois额定行程与第二ois额定行程的比例分配镜头201的行程和图像传感器202的行程。
192.在另一个示例中,行程分配部207可以随机分配镜头201的行程和图像传感器202的行程。
193.当镜头和图像传感器均参与光学防抖时,镜组移动控制部205控制镜头201运动的方向与图像传感器移动控制部206控制图像传感器202运动的方向相反。
194.行程分配部207分配好行程后,将第一行程信号和第二行程信号分别传送给镜组移动控制部205和图像传感器移动控制部206。镜组移动控制部205可以根据第一行程信号,控制镜组致动器203驱动镜头201移动至第一目标位置,第一目标位置与第一行程对应。图像传感器移动控制部206可以根据第二行程信号,控制mems致动器204驱动图像传感器202移动至第二目标位置,第二目标位置与第二行程对应。
195.由于镜组致动器203与mems致动器204可以有多种结构形式和驱动原理,需要通过镜组移动控制部205和图像传感器移动控制部206传送相应的控制信号,以控制镜组致动器203和mems致动器204的运动。
196.本技术实施例中,镜头201的平移距离为镜头201的行程,图像传感器202的平移距离为图像传感器202的行程。在只进行af或ois时,镜头201的行程与图像传感器202的行程之和等于目标行程,其中目标行程为镜头201和图像传感器202处于初始位置时二者之间的距离与镜头201和图像传感器202处于目标位置时二者之间的距离之差。这里处于初始位置时二者之间的距离指的是af和/或ois之前,镜头201和图像传感器所在的位置之间的距离;处于目标位置时二者之间的距离指的是完成af和/或ois后,镜头201和图像传感器所在的位置之间的距离。在同时进行af和ois时,相应地镜头201的af行程与图像传感器202的af行程之和等于目标af行程,镜头201的ois行程与图像传感器202的ois行程之和等于目标ois行程。
197.可选地,该摄像头模组还可以包括:镜组位置反馈部。该镜组位置反馈部用于检测镜头201的位置,并将镜头201的位置信息反馈给行程分配部207。这样可以形成闭环,使行程分配部207获取镜头201的当前位置,便于进行进一步调整,提高af和/或ois精度。
198.可选地,该摄像头模组还可以包括:图像传感器位置反馈部。该图像传感器位置反馈部用于检测图像传感器202的位置,并将图像传感器202的位置信息反馈给行程分配部207。这样可以形成闭环,使行程分配部207获取图像传感器202的当前位置,便于进行进一步调整,提高af和/或ois精度。
199.行程分配部207可以位于独立于镜组移动控制部205和图像传感器移动控制部206的元件上,也可以与镜组移动控制部205和/或图像传感器移动控制部206集成于一体。镜组移动控制部205和图像传感器移动控制部206可以位于相互独立的元件上,也可以集成于一体,本技术实施例对此均不作限定。
200.下面结合更为具体的示例描述摄像头模组进行af和ois的过程。
201.图8示出了本技术实施例提供的摄像头模组自动对焦和光学防抖的控制流程示意图。图中实线表示的是摄像头模组进行af时的控制流程,虚线表示的摄像头模组进行ois时的控制流程。
202.如图8所示,镜组马达带动镜组既可以进行af,也可以进行ois。具体地,镜组马达(为上述镜组致动器203的一例)可以包括镜组af运动单元304和镜组ois运动单元309。该镜组af运动单元304可以接收用于移动镜组进行af的驱动芯片(integrated circuit,ic)(为方便描述,以下简称镜组af驱动ic,为上述镜组移动控制部205的一例)303的控制信号。该镜组ois运动单元309可以接收用于移动镜组进行ois的驱动芯片(为方便描述,以下简称镜组ois驱动ic,为上述镜组移动控制部205的一例)308的控制信号。
203.示例性地,该镜组af运动单元304可以为图2所示的镜组af马达231,该镜组ois运动单元可以为图2所示的镜组ois马达232。
204.mems马达带动图像传感器既可以进行af,也可以进行ois。具体地,mems马达(为上述mems致动器204的一例)可以包括mems af运动单元306和mems ois运动单元,其中mems ois运动单元可以包括mems ois x-运动单元310、mems ois x+运动单元311、mems ois y-运动单元312、mems ois y+运动单元313。该mems af运动单元306和mems ois运动单元可以接收用于移动图像传感器进行af/ois的驱动芯片(为方便描述,以下简称移动图像传感器的驱动ic,为上述图像传感器移动控制部206的一例)302的控制信号。
205.摄像头模组进行自动对焦af时,可以由镜组af运动单元304带动镜头组件执行,和/或由mems af运动单元306带动图像传感器执行。
206.具体地,如图8所示,当需要进行自动对焦时,应用处理器(application processor,ap)(也称ap芯片)或图像处理信号单元(image signal processing,isp)(也称isp芯片)301(可以为上述行程分配部207的一例)根据图像传感器获取的图像确定是否对焦。在没对焦的情况下,ap/isp 301根据图像传感器的图像可以获得镜组与图像传感器的目标位置信息,该目标位置信息用于指示镜组和图像传感器在对焦状态下所在的位置。
207.可选地,该目标位置信息可以包括以下至少一种信息:对焦状态下镜组与图像传感器之间的目标距离;镜组的目标位置(也称第一目标位置)和图像传感器的目标位置(也称第二目标位置);镜组和图像传感器需要移动的总距离(也称目标移动距离或目标行程)。
208.本技术实施例中,第一目标位置用于指示在对焦状态下镜组应在的位置,第二目标位置用于指示在对焦状态下图像传感器应在的位置。也就是说,第一目标位置与第二目标位置用于指示镜组和图像传感器应该在哪个位置。目标移动距离用于指示镜组和图像传感器应该移动多少。
209.相应地,当满足以下任一条件时,图像传感器上获取的图像是清晰的,即实现了对焦:镜组与图像传感器之间的距离为目标距离;镜组位于第一目标位置且图像传感器位于第二目标位置;镜组和图像传感器移动的总距离等于目标移动距离。
210.可选地,ap/isp 301可以通过对焦检测算法得到镜组与图像传感器的目标位置信息。
211.ap/isp 301将目标位置信息传递给移动图像传感器的驱动ic 302。移动图像传感器的驱动ic 302具备计算功能,例如移动图像传感器的驱动ic 302可以包括微控制单元
(microcontroller unit,mcu)。移动图像传感器的驱动ic 302根据接收到的目标位置信息以及镜组的当前位置、图像传感器的当前位置,进行行程分配,确定镜组af运动单元304对应的第一子行程信号(第一子行程信号为图7中的af过程时的第一行程信号的一个示例)和mems af运动单元306对应的第二子行程信号(第二子行程信号为图7中的af过程时的第二行程信号的一个示例)。这里,移动图像传感器的驱动ic 302包括图像传感器移动控制部和行程分配部,即图像传感器移动控制部和行程分配部集成于同一芯片上。
212.移动图像传感器的驱动ic 302将第一子行程信号传递给镜组af驱动ic 303。相应地,镜组af驱动ic 303根据第一子行程信号驱动镜组af运动单元304带动镜组运动到第一指定位置(即af过程中镜头的第一目标位置)。该第一指定位置与第一子行程信号相对应。示例性的,若镜组马达为vcm,第一子行程信号用于指示镜组af运动单元304需要移动的距离或镜组af运动单元304应到达的位置,则镜组af驱动ic 303可以通过改变通入vcm的线圈的电流使镜组af运动单元304达到与第一子行程信号对应的第一指定位置。
213.移动图像传感器的驱动ic 302将第二子行程信号传送给升压ic 305(可以为图像传感器移动控制部206的一例)。相应地,升压ic 305根据第二子行程信号驱动mems af运动单元306带动图像传感器运动到第二指定位置。具体地,升压ic 305根据第二子行程信号确定第二子行程信号对应的电压值,电压与mems马达的行程为二次关系且电压与mems马达的行程一一对应,在第二子行程信号对应的电压值下,mems af运动单元306带动图像传感器移动到第二指定位置(即af过程中图像传感器的第二目标位置)。换句话说,在一定行程范围内,mems马达的行程与电压值之间为单调递增的二次函数关系,在该第一行程范围内,mems马达的行程随电压值的增大而增大。
214.可选地,镜组af运动单元304与镜组af驱动ic 303可以形成闭环反馈系统。镜组af运动单元304可以将自己的实际位置或实际位移(本技术实施例称为第一反馈信息)反馈给镜组af驱动ic 303,镜组af驱动ic 303进一步可以将第一反馈信息传递给移动图像传感器的驱动ic 302。
215.示例性的,镜组af运动单元304可以配置位置反馈器(为上述镜组位置反馈部的一例)例如霍尔(hall)传感器、隧道磁阻(tunnel magneto resistance,tmr)传感器或应变传感器(例如设置于弹簧悬臂梁上),进行闭环反馈。具体地,例如,镜组af驱动ic 303上装配有第一磁性元件,镜组af运动单元304上装配有第二磁性元件,当镜组af运动单元304运动时,第二磁性元件与第一磁性元件之间的距离发生变化,磁场发生变化。镜组af驱动ic 303可以感应第一磁性元件与第二磁性元件之间产生的磁场变化,从而判断镜组af运动单元304是否达到第一指定位置,以及镜组af运动单元304的实际位置。
216.可选地,mems af运动单元306与移动图像传感器的驱动ic 302可以形成闭环反馈系统。mems af运动单元306可以将自己的实际位置或实际位移(本技术实施例称为第二反馈信息)反馈升压ic 305,升压ic 305进一步可以将第二反馈信息传递给移动图像传感器的驱动ic 302。
217.示例性的,当mems马达采用静电力驱动时,mems马达可以内置感应梳齿,通过检测相对间距产生的不同电容,以直流电压方式输出对应位置以形成闭环。在一些其他实施例中,可以通过在弹簧悬臂梁上设置应变传感器,通过感应应变转化为电阻变化,实现闭环位移反馈。感应梳齿和应变传感器均为上述图像传感器位置反馈部的一例。
218.可选地,移动图像传感器的驱动ic 302可以根据第二反馈信息继续传递信号指令给升压ic,以驱动mems af运动单元306运动,实现精细调整。
219.可选地,在镜组af运动单元304最终停留的位置与第一指定位置存在误差时,移动图像传感器的驱动ic 302可以根据镜组对应的实际位移信号,驱动mems af运动单元306带动图像传感器运动,弥补误差。最后镜组停留的位置(本技术实施例中称为第一实际位置)与第一指定位置的误差等于图像传感器停留的位置(本技术实施例中称为第二实际位置)与第二指定位置的误差。即镜组停留的第一实际位置与图像传感器停留的第二实际位置之间的距离等于第一指定位置与第二指定位置之间的距离,使得图像传感器上获取的图像是清晰的。
220.总而言之,本技术实施例中af的控制过程为:移动图像传感器的驱动ic 302获得镜组和图像传感器的目标位置信息之后,根据镜组af运动单元304和mems af运动单元306反馈的当前位置,可以计算出镜组af运动单元304和mems af运动单元306需要到达的指定位置,并将对应的行程信号传递给驱动镜组af运动单元304和mems af运动单元306运动的芯片,即镜组af驱动ic 303和升压ic 305。镜组af驱动ic 303和升压ic 305根据接收到的行程信号各自驱动对应的镜组af运动单元304和mems af运动单元306,使其带动镜组和图像传感器运动到指定位置。进一步地,镜组af驱动ic 303和升压ic 305能够检测运动单元实际到达的位置,并将镜组和图像传感器的实际位置信息反馈给移动图像传感器的驱动ic 302。相应地,移动图像传感器的驱动ic 302可以根据镜组和图像传感器的实际位置信息和目标位置信息继续进行调整,直到镜组和图像传感器到达各自的指定位置,实现对焦。
221.本技术实施例中,在af过程中,镜组af马达(具体为镜组af运动单元304)与mems马达(具体为mems af运动单元306)可以同时同步运动,也可以分步运动。在一些实施例中,也可以采用其中一个af马达静止,另一个af马达运动的方式进行af。下面进行举例说明。
222.例如,若mems马达的af额定行程(即上述第二af额定行程,例如100μm)能够覆盖常规照片拍摄所用的焦段(例如从无穷远到近焦如60cm的焦段),则当拍摄该焦段内的景象时,可以使镜组af马达静止,只运动mems马达。mems马达精度高、响应速度快,能够提升af的响应速度和对焦精度。这种af组合方式可以适用于mems马达的af额定行程能够覆盖照片拍摄所用焦段的场景。
223.又如,若mems马达的af额定行程(例如100μm)能够覆盖视频拍摄的常用焦段(例如从无穷远对焦平面端至近焦如60cm的焦段),则当拍摄视频时,可以使镜组af马达静止,只运动mems马达。mems马达精度高、响应速度快,能够提升af的响应速度和对焦精度。特别在视频远近焦切换时,镜组af马达位置固定,仅使用mems马达移动图像传感器,可提升约100μm的远近焦切换速度,可适应常用焦段在30帧或60帧或更高帧视频的流畅对焦及对焦帧内清晰度的需求。拍摄高帧视频时,远近焦切换时留给马达驱动的时间非常短,mems马达则可以在极短的时间内达到指定位置。因此,这种af组合方式可以适用于视频拍摄场景,特别地可适用于高帧视频的拍摄场景。
224.又如,若mems马达的af额定行程(例如100μm)能够覆盖常规照片拍摄所用的焦段(例如从无穷远到近焦如60cm的焦段),则当拍摄该焦段内的景象时,镜组af马达可以先运动,mems马达后运动然后慢慢跟上去,或者镜组af马达到达指定位置后mems马达再运动。其中镜组af马达以大步进进行粗调,mems马达以小步进进行微调。这种af组合方式可以适用
于拍照等对于af响应速度要求不高的场景。
225.又如,若mems马达的af额定行程(例如100μm)能够覆盖常规拍摄所用的焦段(例如从无穷远到近焦如60cm的焦段),但需要拍摄微距(例如60cm至10cm的焦段)范围内的景象时,需要利用镜组af马达进行自动对焦,利用mems马达进行微调和准焦。这是因为拍摄微距对应的焦段的景象时,镜组和图像传感器之间的距离变化快得多,mems马达的af额定行程不能覆盖镜组与图像传感器的相对距离。举例说明,无穷远至50cm焦段所对应的马达行程可以为40μm-100μm,但从50cm至10cm焦段所对应的马达行程可能为400μm-500μm,mems马达的行程有限,因此可以利用镜组af马达实现微距焦段内的自动对焦,利用mems马达进行准焦,调整对焦精度。这种af组合方式可以适用于mems马达的af额定行程不能够覆盖拍摄所用焦段的场景,例如微距拍摄。
226.又如,当整个光学系统的高度(即镜头光阑到图像传感器之间的距离)超过了mems马达的af额定行程的场景下,需要镜组af马达与mems马达同时运动。
227.应理解,以上示例仅为举例说明,本领域技术人员可以根据mems的af额定行程以及拍摄焦段相应确定镜组af马达与mems进行af的组合方式。
228.本技术实施例中,镜组af马达的额定行程(即上述第一af额定行程)范围较大,基本可以覆盖从无穷远到近焦的对焦距离,为方便描述,本技术实施例中将镜组af马达的额定行程范围称为第一af额定行程。mems马达由于制造工艺的限制,驱动行程较小,但mems马达具有高精度、高响应速度,为方便描述,本技术实施例中将mems马达的af额定行程范围称为第二af额定行程。
229.可选地,在进行自动对焦时,镜组af马达可以进行分档位运动,镜组af马达在每个档位下时由mems马达进行微调。具体地,可以将镜组af马达对应的第一af额定行程划分为多个档位,每个档位对应一个行程,镜组af马达按照信号指令停留在某个档位时,mems马达补足余下对焦行程,实现快速对焦和精准微调。也即,第一af额定行程包括多个固定的行程值,镜组af马达可以按照信号指令完成某个固定行程值,剩下的对焦行程由mems完成。
230.为方便理解,下面举例说明。例如,镜组af马达的额定行程范围为400-500μm,即第一af额定行程为400-500μm,mems马达的额定行程范围为100-150μm,即第二af额定行程为100-150μm。镜组af马达对应的第一af额定行程被划分为五个档位,分别为档位1(对应额定行程为0)、档位2(对应额定行程为100μm)、档位3(对应额定行程为200μm)、档位4(对应额定行程为300μm)、档位5(对应额定行程为400μm)。在镜组和图像传感器都进行af运动时,可以先确定镜组af马达的行程是多少,相应确定镜组af马达的档位是多少,对焦所需的余下行程由mems马达运动补足。例如镜组与图像传感器之间的实际距离为500μm,计算出来的目标距离(即对焦所需行程)为250μm,则镜组af马达的行程挡位可以为挡位3。移动图像传感器的驱动ic 302将镜组af运动单元304行程对应挡位3的指令传递给镜组af驱动ic 303,由镜组af驱动ic 303驱动镜组af运动单元304运动200μm。同时移动图像传感器的驱动ic 302将mems af运动单元306行程为50μm的指令传递给升压ic 305,由升压ic 305驱动mems af运动单元306运动50μm,使镜组与图像传感器之间的距离为250μm。
231.可选地,对应镜组af马达的不同档位,mems马达的行程范围可以相同,也可以不同。例如镜组af马达处于档位1时,mems马达的行程范围可以为0-100μm,镜组af马达处于档位2时,mems马达的行程范围可以为0-150μm。
232.应理解,上述示例中镜组af马达的额定行程仅仅是示例性的,在实际设计中,镜组af马达的额定行程可能比400-500μm更大或更小,本技术实施例对此并不限定。同理,mems马达的af额定行程仅仅是示例性的,在实际设计中,mems马达的af额定行程可能比100-150μm更大或更小,本技术实施例对此并不限定。
233.本技术实施例中,在镜组af马达的基础上增加mems af马达,能够延长af行程,提升微距能力。换句话说,组合镜组af马达的长行程能力与mems马达的高精度、高响应速度,能够进行快速对焦和精准微调,达到较好的微距能力。
234.可选地,镜组af马达和mems马达也可以进行分档位温漂补偿,具体实现方式与分挡位运动进行af类似。为方便理解,下面以镜组af马达为例举例说明。温度变化会影响塑胶镜头的后焦变化,在温度变化的影响下,达到对焦平面时所需的位移相比常温时所需的位移大。例如原本需要位移50μm就能达到对焦平面,在温度变化的影响下可能需要位移150μm才能实现常温下的同等效果,因此多出来的100μm位移即为温漂补偿。在分档位温漂补偿时,当镜组af马达位于档位1(对应额定行程为0)时,可用于常温下的温漂补偿,当镜组af马达位于档位2(对应额定行程为100μm)时,可用于高温状态下的温漂补偿。应理解,上述数值仅为举例说明,对本技术不造成任何限定。
235.本技术实施例中,采用高精度、高响应速度mems马达进行af,可以提升对焦的重复精度,提高拍摄成片率。这里对焦的重复精度可以理解为在同一个位移指令下,多次对焦的结果中,偏差最大的两次对焦结果所对应的闭环传感器检测到的位移(即检测到的马达实际位移)之间的差值。对焦的重复精度的单位为位移。本技术实施例中对焦的重复精度提高的原因主要有以下几点。一是mems马达的步长的分辨率更小,例如普通马达的最小步长可能为1μm,而mems马达的最小步长可能为0.5μm或更小,因此整体af精度可提升至重复精度至≤1μm,同时检测的精度高、驱动的精度高。二是mems马达在标定行程时是通过给定某个信号指令值(例如code值或电压值)时,将马达停留的位置标定为该信号指令值对应的位置,一般来说,在同一个信号指令值的驱动下,马达到达的实际位置之间的差距比较小。三是在使用闭环反馈进行控制时,由于传感器反馈信号的存在,通过控制算法进行误差补偿,马达会在有限的时间达到准确的指定的位置。由于此时间较长,一般会设定一个容许的精度范围,设定马达运动轨迹行至此范围之内即抵达所需位置,此时间为对焦稳定时间(settling time)。由于mems马达响应速度更快,对焦稳定时间更短,相较于镜组af马达,能够更快地达到同等的误差范围。因此mems马达在同等对焦稳定时间下可以达到更小的误差范围,提高精度。
236.以上描述了自动对焦过程,下面继续结合图8描述光学防抖过程。
237.摄像头模组进行光学防抖ois时,可以由镜组ois运动单元309带动镜头组件执行,和/或由mems ois运动单元带动图像传感器执行。
238.具体地,如图8所示,当需要进行光学防抖时,电子设备内的角运动检测装置例如陀螺仪(gyro)可以确定是否发生抖动。在发生抖动的情况下,陀螺仪可以获得抖动信息,该抖动信息用于指示电子设备发生的抖动角度,也即用于指示镜组和图像传感器进行光学防抖时的补偿角度。
239.可选地,该抖动信息可以包括度每秒(damage per second,dps)信息。通过将dps进行积分,可以获得抖动角度。
240.本技术实施例中,镜组ois运动单元309和mems ois运动单元通过在垂直光轴的方向上分别带动镜组和图像传感器平移来进行ois,因而光学防抖的补偿角度与镜组或图像传感器的平移距离有对应关系。以镜组为例,当进行ois时,镜组ois运动单元309带动镜组沿x轴和/或y轴平移,通过改变后焦光路的角度进行ois补偿。补偿角度与平移行程之间的关系为:平移行程=efl*sinβ,efl为等效焦距(equivalent focal length,efl),β为补偿角度,补偿角度等于抖动角度。通过等效焦距efl和补偿角度β,可以得到平移行程。
241.本技术实施例中由于镜组与图像传感器均可以进行ois,因而需要进行平移行程分配。
242.在一个示例中,平移行程分配可以由陀螺仪执行,这里陀螺仪执行了行程分配部对应的功能。陀螺仪获得抖动信息后,将抖动信息按时间段分配给移动图像传感器的驱动ic302和镜组ois驱动ic 308。由于两个驱动ic均具备计算能力,因此两个驱动ic可以根据分配的时间段内的抖动信息分别进行计算,得到镜组和图像传感器各自的平移行程。为方便描述,本技术实施例中将镜组的平移行程称为第三子行程,将图像传感器的平移行程为第四子行程。镜组ois驱动ic 308传递第三子行程信号(第三子行程信号为图7中的在ois过程时的第一行程信号的一个示例)给镜组ois运动单元309,相应地,镜组ois运动单元309根据第三子行程信号带动镜组平移,其中平移的距离为第三子行程。移动图像传感器的驱动ic 302传递第四子行程信号(第四子行程信号为图7中的ois过程时的第二行程信号的一个示例)给升压ic 305,升压ic 305根据第四子行程信号确定第四子行程信号对应的电压值,在对应的电压值下,mems ois运动单元带动图像传感器平移,其中平移的距离为第四子行程。具体地,升压ic 305可以根据第四子行程信号驱动mems ois x-运动单元310、mems ois x+运动单元311、mems ois y-运动单元312、mems ois y+运动单元313中一个或多个运动单元运动,该一个或多个运动单元的合成平移方向上的位移为第四子行程。
243.在另一个示例中,平移行程分配可以由移动图像传感器的驱动ic 302执行,这里移动图像传感器的驱动ic 302执行了行程分配部对应的功能。陀螺仪获得抖动信息后,将抖动信息传递给移动图像传感器的驱动ic 302。一种方式下,移动图像传感器的驱动ic302通过计算可以获得抖动角度以及镜组和图像传感器平移的总行程,然后移动图像传感器的驱动ic 302可以将平移总行程分配给镜组ois驱动ic 308和升压ic 305。另一种方式下,移动图像传感器的驱动ic 302通过计算获得抖动角度后,可以直接将补偿角度分配给镜组ois驱动ic 308和自己。相应地,镜组ois驱动ic 308可以根据分配的补偿角度计算出镜组的平移行程,移动图像传感器的驱动ic 302根据分配给自己的补偿角度可以计算出图像传感器的平移行程。获取到平移行程后,镜组ois驱动ic 308传递第三子行程信号给镜组ois运动单元309,镜组ois运动单元309根据第三子行程信号带动镜组平移,平移的距离为第三子行程。移动图像传感器的驱动ic 302传递第四子行程信号给升压ic 305,升压ic 305根据第四子行程信号确定第四子行程信号对应的电压值,在对应的电压值下,mems ois运动单元带动图像传感器平移,平移的距离为第四子行程。
244.本技术实施例中,当镜组和图像传感器同时进行ois时,镜组和图像传感器的运动方向相反。
245.本技术实施例中,用于ois的平移行程可以平均分配给镜组和图像传感器,也可以根据镜组ois马达和mems马达的额定行程比例进行等比分配,还可以全部分配给镜组和图
像传感器中的任意一个,还可以根据实际需要随机分配给镜组和图像传感器。为方便理解,下面举例说明。
246.例如,镜组ois马达的额定行程(即上述第一ois额定行程)与mems马达的ois额定行程(即上述第二ois额定行程)相等,如镜组ois马达和mems马达的ois额定行程均为
±
100μm,陀螺仪检测到的抖动角度为0.8
°
,即补偿角度为0.8
°
,假设摄像头模组的efl为5-8mm,根据平移行程与补偿角度之间的关系可以计算出原本需要进行x+方向上平移100μm的ois补偿。将100μm的平移行程平均分配给镜组和图像传感器,这样在进行ois时,镜组ois马达可以带动镜组进行x-方向的50μm位移,mems马达带动图像传感器进行x+方向的50μm位移,二者总和等效为x+方向上100μm的ois补偿。
247.又如,镜组ois马达的额定行程与mems马达的额定行程不均等,如镜组ois马达的额定行程为
±
150μm,mems马达的额定行程为
±
100μm,则前述确定的在x+方向上的100μm ois补偿可以按照镜组ois马达和mems马达的额定行程比例,进行等比调整。例如镜组ois马达分配的行程为x-方向上60μm位移,mems马达分配的行程为x+方向上的40μm位移。这样在进行ois时,镜组ois马达可以带动镜组进行x-方向的60μm位移,mems马达带动图像传感器进行x+方向的40μm位移,二者总和等效为x+方向上100μm的ois补偿。
248.当然,在一些实施例中,镜组和图像传感器的平移行程可以随机分配,只要镜组和图像传感器平移运动的总和能够实现ois补偿即可。
249.在进行光学防抖时,镜组ois马达与mems马达可以同时同步运动(即双马达同时运动),也可以分步运动(即一颗马达运动时,另一颗马达不动)。
250.应理解,上述示例中镜组ois马达的额定行程仅仅是示例性的,在实际设计中,镜组ois马达的额定行程可能比
±
100μm更大或更小,本技术实施例对此并不限定。同理,mems马达的ois额定行程仅仅是示例性的,在实际设计中,mems马达的ois额定行程可能比
±
100μm更大或更小,本技术实施例对此并不限定。
251.本技术实施例中,组合镜组ois马达和mems马达带动镜组与图像传感器反向运动,可以增大ois角度补偿,特别地,在镜组ois马达与mems马达的额定行程均等的情况下,本技术实施例提供的摄像头模组可以实现双倍于常规镜组ois马达的ois角度补偿。例如,常规马达的ois马达的ois角度约为0.7
°
,本技术实施例提供的摄像头模组能够将ois角度提升至1.5
°‑2°
,能够满足用户在手持电子设备拍摄时,常规小幅度运动状态下所需的防抖角度。另外,由于mems马达的精度和响应速度较高,因此在实现ois时,可以提升ois的精度和响应速度。
252.可选地,移动图像传感器的驱动ic 302为具有mcu功能的ic。
253.可选地,镜组af驱动ic 303为具有mcu功能的ic。
254.可选地,镜组ois驱动ic 308为具有mcu功能的ic。
255.可选地,升压ic 305可以为ad5850、pda50、bos1901等。升压ic 305可以采用电荷泵或升压(boost)电路方式升压,输出可调节线性稳定电压值。
256.本技术实施例所涉及的芯片例如移动图像传感器的驱动ic 302、镜组af驱动ic 303、镜组ois驱动ic 308、升压ic 305、ap/isp 301,可以包括一个或多个接口。接口可以包括集成电路(inter-integrated circuit,i2c或iic)接口、串行外设接口(serial peripheral interface,spi)等。i2c接口是一种双向同步串行总线,包括一根串行数据线
(serial data line,sda)和一根串行时钟线(derail clock line,scl)。spi接口是一种高速、全双工、同步的通信总线。当芯片之间在需要传递信息时,可以通过i2c接口或spi接口进行信息传递。
257.本技术实施例中当mems马达采用其他驱动结构例如磁电mems时,可以不需要升压ic 305,而直接由移动图像传感器的驱动ic 302驱动mems马达。
258.本技术实施例以移动图像传感器的驱动ic 302、镜组af驱动ic 303、镜组ois驱动ic 308、和升压ic 305为独立的芯片为例进行的说明,在一些其他实施例中,该四个芯片中的任意两个或多个芯片的功能可以集成在一个芯片上。例如可以将移动图像传感器的驱动ic 302所实现的功能集成在镜组af驱动ic 303或镜组ois驱动ic 308上,本技术实施例不作限定。
259.综上,本技术实施例提供的摄像头模组,组合了镜组af马达在行程、驱动力上的优势和mems马达在精度和响应速度上的优势,能够实现af的微距行程与常用焦段的快速对焦,提升成片率,并且能够将二者的ois行程叠加,增大ois防抖角度,提升远距离的拍照和视频成像质量,提升用户体验。
260.上文提到,当mems马达采用不同的驱动方式时,mems马达的结构不同。本技术实施例提供一种静电力驱动式mems马达,能够提升mems马达的可靠性和性能表现。下面结合图9至图15进行详细描述。
261.图9示出了本技术实施例提供的图像传感器组件的示意性爆炸图。图9所示的图像传感器组件400为图2或图3中的图像传感器组件240的一种示例性结构。为方便理解,图9示出了图像传感器组件进行单方向ois的示意性结构,但应理解,本技术提供的技术方案可以应用于其他的采用mems马达的图像传感器组件上。
262.如图9所示,图像传感器组件400包括滤光片410、图像传感器420、mems马达430、线路板(图中未示出)。其中mems马达430包括动子431、定子432和用于连接动子431和定子432的弹簧臂433,动子431设置于定子432之上且通过弹簧臂433与定子432相连接,动子431相对于定子432可运动。图9还示例性地示出了摄像头模组的部分外壳,分别为第一外壳部分2101和第二外壳部分2102,第一外壳部分2101与第二外壳部分2102相连接,且第一外壳部分2101与第二外壳部分2102之间形成有容纳空间,用于收容图像传感器组件400。该第一外壳部分2101和第二外壳部分2102可以将mems马达430封装。
263.参考图9,mems马达430设置于第二外壳部分2102之上。具体地,mems马达430中的定子432设置于第二外壳部分2102之上且与第二外壳部分2102相连接,mems马达中的动子431设置于定子432之上且通过弹簧臂433与定子432相连接。本技术实施例中定子432相对于第二外壳部分2102固定,动子431相对于第二外壳部分2102(或定子432)可运动。
264.图像传感器420设置与mems马达430之上。具体地,图像传感器420设置于动子431之上且与动子431相连接。本技术实施例中动子431相对于定子432运动时,可带动与之相连接的图像传感器420一起运动。
265.滤光片410设置于图像传感器420之上,具体地滤光片410可设置于第一外壳部分2101上开设的通光孔处,滤光片410与第一外壳部分2101相连接。摄像头模组外部的光线通过镜头组件后可经由滤光片410射向图像传感器420。这里对滤光片410和图像传感器420的描述可参考上文关于滤光片241和图像传感器242的相关描述,为简洁,在此不再赘述。
266.在一些实施例中,动子431上可以设置线路板,线路板之上设置图像传感器420。
267.图10示出了图9中的mems马达的示意性俯视图和仰视图。图11示出了图10中的mems马达沿a-a剖开的示意图截面图。应理解,本技术实施例中俯视图和仰视图为mems马达在xy平面内的投影,其中俯视图为从入光一侧观看时得到的视图,仰视图为从与入光侧相对的一侧观看时得到的视图。
268.如图10所示,定子432包括定子主体4321、固定梳齿4322、基板4323。
269.定子主体4321呈凹槽状,主要起支撑作用和固定作用。定子主体4321形成的凹槽可用于容纳动子431。定子主体4321上设置有第一开孔4302,该第一开孔4302用于动子431上的连接件4313穿过。
270.固定梳齿4322呈梳齿状,设置于定子主体4321上靠近动子431的一侧(也即靠近图像传感器的一侧),作为静电力驱动电极中的一个电极。
271.基板4323呈板状,设置于定子主体4321上远离动子431的一侧(也即远离图像传感器的一侧)。基板4323与定子主体4321相连接,主要起支撑作用。基板4323与定子主体4321可以在同一个加工过程的不同工序中制备,也可以在不同的加工过程分别制备然后在粘接在一起,本技术实施例对此不作限定。基板4323上设置有第二开孔4303,第二开孔4303用于收容动子431上的限位件4314。
272.仍参考图10,动子431包括动子主体4311、可动梳齿4312、连接件4313、限位件4314。
273.动子主体4311呈板状,主要起支撑作用,可提供与图像传感器相连接的区域。示例性的,动子主体4311可与图像传感器采用粘接或焊接方式相连。
274.可动梳齿4312从动子主体4311上伸出,呈梳齿状,作为静电力驱动电极中的另一个电极。可动梳齿4312设置于动子主体4311上靠近图像传感器的一侧,在装配状态下,动子431上的可动梳齿4312与定子432上的固定梳齿4322呈叉指结构,可动梳齿4312相对于固定梳齿4322可沿叉指方向运动。即固定梳齿4322包括多个第一梳齿结构,可动梳齿4312包括多个第二梳齿结构,固定梳齿4322上的多个第一梳齿结构与可动梳齿4312上的多个第二梳齿结构交错咬合。第一梳齿结构(除边缘处的梳齿结构外)分别与两个第二梳齿结构相邻,第二梳齿结构(除边缘处的梳齿结构外)分别与两个第一梳齿结构相邻。相邻的第一梳齿结构和第二梳齿结构之间具有一定间距,第一梳齿结构与第二梳齿结构之间相重叠。
275.连接件4313设置于动子主体4311上远离图像传感器的一侧,其一端连接动子主体4311,另一端连接限位件4314,即限位件4314与动子主体4311通过连接件4313相连接。连接件4313从定子主体4321上开设的第一开孔4302穿过,使得限位件4314和动子主体4311分别位于定子主体4321两侧。
276.限位件4314设置于基板4323上开设的第二开孔4303中,与连接件4313相连接。限位件4314与连接件4313可以在同一个加工过程的不同工序中制备,也可以在不同的加工过程分别制备然后在粘接在一起,本技术实施例对此不作限定。
277.弹簧臂433呈细长状,用于连接动子431和定子432,能够提供与梳齿结构之间的静电力相等的弹簧力,使动子431处于平衡状态。具体地,弹簧臂433包括第一端4331和第二端4332,其中第一端4331与动子主体4311相连接,第二端4332与定子主体4321相连接。弹簧臂433上从第一端4331到第二端4332的延伸段能够发生弹性形变,提供弹簧力。弹簧臂433可
以沿着动子主体4311外缘延伸,也可以发生弯折形成折叠状、蛇形或其他规则或不规则的形状等,本技术实施例对此不作限定。
278.本技术实施例中,固定梳齿4322与可动梳齿4312可称为梳齿对。mems马达工作时,分别在固定梳齿4322和可动梳齿4312上施加不同的电压值,固定梳齿4322与可动梳齿4312之间存在电势差。在电势差的作用下,可动梳齿4312沿着叉指方向相对固定梳齿4322产生运动,相应地,动子431沿着叉指方向相对定子432运动。由于图像传感器与动子431相连接,进而实现动子431带动图像传感器运动。
279.可动梳齿4312的运动可以利用固定梳齿4322与可动梳齿4312之间的斥力,也可以利用固定梳齿4322与可动梳齿4312之间的吸力。在一些实施例中,由于固定梳齿4322与可动梳齿4312之间的吸力远大于斥力,因此可采用施加电压值后固定梳齿4322与可动梳齿4312之间产生相互吸引的力来带动可动梳齿4312运动。
280.可选地,固定梳齿4322与可动梳齿4312中一个电极接地,另一个电极施加电压。
281.可选地,固定梳齿4322与可动梳齿4312可以施加不同的线性电压值,电压差与静电力为一一对应关系,通过电压差可以得到固定梳齿4322与可动梳齿4312之间的静电力,也即得到定子432与动子431之间的静电力。
282.参考图10中的(a)所示,mems马达工作时,在可动梳齿4312的带动下,动子主体4311沿着叉指方向(即需要的ois方向)移动,同时带动图像传感器平移进行光学防抖。由于弹簧臂433的第一端4331与动子主体4311相连接,第二端4332与定子主体4321相连接,mems马达工作时,弹簧臂433的第一端4331随着动子主体4311运动,弹簧臂433的第二端4332固定,弹簧臂433会发生弹性形变,产生弹力。当弹簧臂433产生的弹力与梳齿结构产生的静电力相等时,动子431处于平衡状态。
283.可选地,mems马达可以包括一组或多组梳齿对。
284.可选地,mems马达可以包括一组或多组弹簧臂。
285.mems马达可以在面内进行第一ois方向(例如x反向)和第二ois方向(例如y方向)上的光学防抖。因此,用于实现第一ois方向的光学防抖的梳齿对可以有一组或多组,用于实现第一ois方向的光学防抖的弹簧臂可以有一组或多组。用于实现第二ois方向的光学防抖的梳齿对可以有一组或多组,用于实现第二ois方向的光学防抖的弹簧臂可以有一组或多组。梳齿对和弹簧臂的数量具体可以根据实际需要相应设计和选择,本技术实施例对此不作限定。
286.换句话说,mems马达带动图像传感器进行面内(即xy平面)平移实现ois时,其作动原理是由于梳齿结构提供的面内(xy轴方向平移)方向的静电力与面内对应方向的弹簧臂组提供的弹力达到平衡,可以实现系统的稳定位移,从而能够使图像传感器稳定在指定位置。在一些实施例中,mems马达的运动稳定时间可达到<10ms,运动约100μm。
287.在实际应用中,梳齿结构上施加的电势差可以根据弹簧臂433需要的位移确定。具体地,实现某个方向的ois时,电子设备可以计算出图像传感器需要平移的距离,也即弹簧臂433的位移。弹簧的劲度系数即k值已知,根据k值和弹簧臂位移可以计算出弹簧力,也即梳齿结构应提供的静电力。由于静电力与电压差一一对应,根据获得的静电力即可以获得需要施加的电压差以及电压值为多少。
288.可选地,本技术实施例提供的mems马达还可以包括感应梳齿,该感应梳齿的结构
与上文提及的固定梳齿和可动梳齿的结构类似,只是电路不同。感应梳齿用于检测梳齿结构中相对间距产生的不同电容,并以直流电压方式输出对应的位置,形成闭环。即本技术实施例提供的mems马达可以感应自身所在的位置并形成闭环反馈,用于精确控制图像传感器的位置。当然,在另一些实施例中,还可以使用其他方式实现闭环反馈,例如采用应变传感器,通过弹簧臂的形变来反馈位移,形成闭环反馈,本技术实施例对此不作限定。
289.静电梳齿所能提供的静电力有限,弹簧臂通常较为细长薄弱。在大冲击的情况(例如跌落、撞击)下,弹簧臂存在失稳变形风险,容易造成弹簧臂变形断裂、动子撞击定子等可靠性风险。
290.本技术实施例提供的mems马达中,动子431与定子432之间设置有点胶区域,如图10中的(a)和图11所示,在该点胶区域内点有阻尼胶440。阻尼胶440连接动子431与弹簧臂433,和/或连接弹簧臂433与定子432。当阻尼胶440连接动子431与弹簧臂433,且连接弹簧臂433与定子432时,即阻尼胶440连接动子431与定子432,且包围弹簧臂433的部分或全部。当动子431相对于定子432运动时,阻尼胶440在力的作用下可以发生形变。点胶区域(或者阻尼胶的覆盖区域)包括第一表面,该第一表面为与阻尼胶相接触的表面,该第一表面包括:定子432与阻尼胶440相接触的表面,动子431与阻尼胶440相接触的表面,弹簧臂433与阻尼胶440相接触的表面。
291.本技术实施例中,阻尼胶440也可以称为柔软胶,具有较高粘弹性。在自然状态下,阻尼胶440不流动,在挤压或拉伸作用下可以发生变形。由于阻尼胶440具有较大的弹性模量,阻尼胶440很容易发生变形,对于挤压或拉伸阻尼胶440的元件的受力影响较小。阻尼胶440可以为油性阻尼胶或水性阻尼胶。阻尼胶440的材料可以为丙烯酸酯橡胶、聚氨酯、聚丙烯酸酯、环氧树脂、丁基橡胶、丁腈橡胶、聚乙酸乙烯酯、合成树脂、聚丙烯酸甲酯、增塑的聚氯乙烯、互穿网络型的聚异丁基醚、半互穿网络的二元和三元乙丙橡胶以及其他的高分子阻尼材料(例如tb3168k/taica-c)等,本技术实施例对此不作限定。
292.在动子431与定子432之间点阻尼胶440后,阻尼胶440连接了动子431与弹簧臂433,且连接了定子432与弹簧臂433。阻尼胶440相对弹簧臂433、动子431和定子432不动,即阻尼胶440与粘接面相接触的部分相对粘接面之间没有相对运动,只有阻尼胶440的变形。阻尼胶440在受到挤压时可以发生挤压变形(例如被压扁),在受到拉伸时可以发生拉伸变形(例如被拉长)。
293.本技术实施例通过优化mems马达的结构,在mems马达内部动子与定子之间点阻尼胶,可以减少弹簧臂在遭受冲击力例如在跌落、撞击等过程中的晃动,降低弹簧臂撞壁和折断风险,提升了mems马达的可靠性。
294.另外,阻尼胶能提供mems马达在平移方向上的运动的阻尼,可以使系统快速稳定,降低响应时间。具体地,参考图12,从图中可以看出,运动系统中阻尼的缺乏导致其极易震荡,需要较长时间才能稳定在指定位移。当前mems马达的动子和定子主要为硅结构,在面内平移方向由于梳齿活动空间不封闭,空气阻尼极小,几乎可以不考虑压膜阻尼和滑膜阻尼。过低的阻尼会导致系统过度震荡,难以稳定,也会增大后期的控制器调试的难度,影响控制器的兼容度。因此,本技术实施例提供的mems马达中设置有阻尼胶440,可以解决mems马达在响应时的震荡问题,提升mems马达的ois和af性能,降低响应的稳定时间。
295.可选地,与阻尼胶440相接触的表面(即第一表面)设置为凹凸不平状。即与阻尼胶
440相接触的表面包括至少一个凹陷和/或至少一个凸起。其中与阻尼胶440相接触的表面包括动子431上与阻尼胶440相接触的表面、定子上432上与阻尼胶440相接触的表面、弹簧臂433上与阻尼胶440相接触的表面。
296.本技术实施例中,与阻尼胶440相接触的表面设置为凹凸不平的形状,可以增大阻尼胶与粘接面的接触面积,提高阻尼胶的粘接可靠性。
297.可选地,参考图13,与阻尼胶相接触的表面上形成的凹陷或凸起的截面形状可以为矩形、半圆、弧形、梯形、三角形以及其他的规则的或不规则的形状。另外,该至少一个凹陷和/或至少一个凸起形成的截面形状可以是周期性的,也可以是非周期的,例如无规则设置或随机设置。
298.可选地,弹簧臂433上与点胶区域对应的表面设置为凹凸不平状。或者,弹簧臂433全长对应的表面设置为凹凸不平状。或者,弹簧臂433上的部分区域对应的表面设置为凹凸不平状,其中该部分区域对应的表面包括点胶区域对应的表面。
299.可选地,动子431上与点胶区域对应的表面设置为凹凸不平状。或者,动子431上与弹簧臂433对应的部分的表面设置为凹凸不平状。或者,动子431上的部分区域对应的表面设置为凹凸不平状,其中该部分区域对应的表面包括点胶区域对应的表面。
300.可选地,定子432上与点胶区域对应的表面设置为凹凸不平状。或者,定子432上与弹簧臂433对应的部分的表面设置为凹凸不平状。或者,定子432上的部分区域对应的表面设置为凹凸不平状,其中该部分区域对应的表面包括点胶区域对应的表面。
301.本技术实施例中,点胶区域的大小(即阻尼胶的覆盖面积大小)可以根据实际需要确定。阻尼胶的覆盖面积不小于第一阈值,且不大于第二阈值。例如,阻尼胶覆盖的最小面积应能满足阻尼胶不容易掉落,其中阻尼胶覆盖的最小面积的确定与阻尼胶的材质以及粘接面有关。第一阈值可以根据阻尼胶的材质和与阻尼胶相接触的表面的属性确定。又如,阻尼胶覆盖的最大面积应能满足阻尼胶对弹簧臂的运动没有明显影响,其中阻尼胶覆盖的最大面积的确定与需要的阻尼值以及加阻尼胶之后产生的阻力有关。第二阈值可以根据所需要的阻尼值和阻尼胶所产生的阻力确定。
302.本技术实施例中,点胶区域的位置(即阻尼胶的点胶位置)可以设置于弹簧臂433上的任意位置,申请实施例不作限定。示例性的,参考图14中的(a),阻尼胶440可以设置于弹簧臂433上靠近与定子432相连接的一侧,即点胶区域设置于弹簧臂433与定子432相连接的位置对应的区域。参考图14中的(b),阻尼胶440可以设置于弹簧臂433的中间位置,即点胶区域设置于弹簧臂433的中间位置对应的区域。当阻尼胶440点在弹簧臂433的中间位置时,可以阻止运动系统过分晃动。
303.需要说明的是,图9至图14中的mems马达均以单向平移的mems马达为例进行的说明,即图9至图13中的mems马达示意性示出了在一个方向上进行ois的结构,也即mems马达上可动梳齿与固定梳齿的叉指方向相同。但应理解,对于可在x、y平面内进行ois、在z向进行af的mems马达来说,本领域技术人员只需要根据实际需要相应设计动子和定子的结构,使得梳齿结构能够实现mems马达带动图像传感器在面内平移以及在z向的平移即可。在具体实现中,动子和定子之间均可以设置点胶区域,在点胶区域点阻尼胶,在此不再详细描述。
304.mems马达的动子部分质量一般较大,在受到冲击时产生的惯性力较大,mems马达
的动子部分容易朝af方向脱出,存在图像传感器、mems马达撞击摄像头模组外壳的风险。
305.参考图10中的(b)和图11,动子431上设置有限位件4314,限位件4314的尺寸大于定子主体4321上设置的第一开孔4302的尺寸。具体地,限位件4314在第一方向上的尺寸大于第一开孔4302在该第一方向上的尺寸。该第一方向可以为面内的任意方向。当动子431存在向af方向脱出的倾向时,限位件4314的上表面(即限位件4314上靠近定子主体4321一侧的表面)与定子主体4321的下表面(即定子主体4321上远离图像传感器一侧的表面)相接触,阻止动子431继续向af方向运动。也即动子向af方向运动的距离小于梳齿在z方向上的高度,这样可以保证mems马达的可动梳齿与固定梳齿始终处于交错状态而不会完全脱离,能够防止在跌落冲击的过程中,mems马达的动子脱出再复位时的梳齿撞击风险。
306.本技术实施例中,动子431上设置有连接件4313,连接件4313穿过定子主体4321上设置的第一开孔4302。当叉指方向与动子主体所在平面平行时,这里对第一开孔4302的尺寸进行限定,第一开孔4302在第二方向上与连接件4313之间的间隙小于预设值,且小于第一开孔4302在叉指方向上与连接件4313之间的间隙,其中第二方向为垂直于叉指方向的方向。换句话说,第一开孔4302在与面内运动方向垂直的方向上的宽度略大于连接件4313在该方向上的宽度。这样可以利用第一开孔4302在该方向上的间隙来对连接件4313的运动进行限位,能够防止弹簧臂433和动子431上的可动梳齿4312等部件直接撞击到摄像头模组的外壳上。例如,本技术实施例中,梳齿结构提供的静电力能够带动动子431沿y方向运动,则第一开孔4302在x方向上的宽度略大于连接件4313在x方向上的宽度,以间隙作为限位,限制动子在x方向上的运动。
307.可选地,参考图10中的(a),动子431包括与动子主体4311相连的突出部4301,该突出部4301从动子主体4311上伸出并沿叉指方向延伸,且与弹簧臂433设置于动子主体4311的同侧。突出部4301可以在mems遭受大冲击时,与定子主体4321相接触,以避免弹簧臂433发生较大变形而断裂。
308.参考图15,上文提到第一外壳部分2101和第二外壳部分2102可以将mems马达430封装。可选地,第一外壳部分2101上靠近图像传感器的一侧表面设置有限位块2103。该限位块2103可以起到与限位件4314类似的作用,用于限制动子的运动范围,即用于限制mems马达在ois方向运动时脱出,限制mems马达在af方向上过度运动或脱出,提升mems马达的可靠性。
309.可选地,限位块2103可以与第一外壳部分2102一体成型制成,也可以是单独制备后通过焊接或粘接方式连接到第一外壳部分2102上。
310.应理解,限位件4314与限位块2103可以只设置其中一个,也可以两个均设置,本技术实施例不作限定。
311.当限位件4314与限位块2103均设置的情况下,限位件4314与限位块2103可以结合使用,实现多级限位,多级缓冲。具体而言,由于限位块2103是设置在第一外壳部分2102上的部件,其制造公差较大,限位块2103属于模组级限位。而限位件4314一般使用mems技术制备,制造公差小,属于马达级限位。另外,限位件4314与限位块2103联合使用时,还可以避免单独使用其中一个限位器限位时引起的应力集中的问题。
312.可选地,参考图11,若mems马达的动子还可以实现af方向的运动,则mems马达的z向额定行程设置于限位件4314的下方。即当mems需要在z向进行af时,梳齿结构之间的静电
力为吸力,提供动子向与图像传感器相背的一侧进行平移的动力。
313.可选地,参考图15,限位件4314与第二外壳部分2102之间设置有点胶区域,阻尼胶440连接限位件4314与第二外壳部分2102。该处设置的阻尼胶的作用与在动子与定子之间设置的阻尼胶的作用类似,也用于提供阻尼值,防止动子过度震荡,降低响应的稳定时间。
314.应理解,本技术实施例提供的mems马达可以适用于直立式摄像头模组、折叠式摄像头模组、潜望式摄像头模组以及其他类型的摄像头模组中。mems马达可以应用于只移动图像传感器进行af和ois的摄像头模组,也可以应用于同时移动镜头和图像传感器进行af和ois的摄像头模组。
315.综上,本技术实施例提供的mems马达中,动子与定子之间点阻尼胶,能够减少弹簧臂在跌落过程中的晃动,降低弹簧臂撞壁和折断风险,提升可靠性。另外,阻尼胶能够提供平移方向的阻尼,使运动系统快速稳定,降低响应时间。
316.进一步地,mems马达中设置了限位器,例如限位件4314、限位块2103等,能够防止梳齿结构和弹簧臂直接撞击侧壁,还可以防止动子脱出再复位时的梳齿撞击风险。
317.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1