摄像机马达控制芯片及摄像机的制作方法
1.本技术属于摄像技术领域,尤其涉及一种摄像机马达控制芯片及摄像机。
背景技术:
2.随着科技不断的发展,芯片的应用越来越广泛。近些年,安防监控领域也对芯片有大量的应用,例如,通过芯片控制摄像机的马达,以实现对摄像机云台全方位移动的控制,以及实现对摄像机镜头的红外截止滤光片的控制。
3.随着摄像机功能的逐渐增多,摄像机内部电路板的面积越来越紧张,因此,对于摄像机已有芯片来说,尽可能的节约使用面积,显得非常重要。传统技术中摄像机马达控制芯片的设计方案具有一定的改进空间。
技术实现要素:
4.本技术提供一种摄像机马达控制芯片及摄像机,可以解决传统技术中摄像机芯片占用面积大的问题。
5.第一方面,本技术实施例提供了一种摄像机马达控制芯片,应用于摄像机,所述摄像机包括主控芯片、俯仰调节马达、水平调节马达和红外线切换马达,所述摄像机马达控制芯片包括:
6.数字逻辑电路,与所述主控芯片电连接,用于根据所述主控芯片发送的控制指令产生驱动控制信号;
7.基准电路,用于产生基准电流;以及
8.驱动电路,与所述数字逻辑电路、所述基准电路、所述俯仰调节马达、所述水平调节马达、所述红外线切换马达分别电连接,用于根据所述基准电流和所述驱动控制信号驱动所述俯仰调节马达、所述水平调节马达、所述红外线切换马达中的至少一个工作。
9.在其中一个实施方式中,所述驱动电路包括:
10.俯仰调节控制单元,与所述数字逻辑电路、所述基准电路、所述俯仰调节马达分别电连接,用于根据所述基准电流和所述数字逻辑电路发送的俯仰调节信号控制所述俯仰调节马达工作;
11.水平调节控制单元,与所述数字逻辑电路、所述基准电路、所述水平调节马达分别电连接,用于根据所述基准电流和所述数字逻辑电路发送的水平调节信号控制所述水平调节马达工作;
12.红外线切换控制单元,与所述数字逻辑电路、所述基准电路、所述红外线切换马达分别电连接,用于根据所述基准电流和所述数字逻辑电路发送的红外线切换信号控制所述红外线切换马达工作。
13.在其中一个实施方式中,所述摄像机马达控制芯片还包括:
14.振荡器电路,与所述数字逻辑电路电连接,用于产生时钟信号,并将所述时钟信号输出至所述数字逻辑电路;
15.所述数字逻辑电路用于根据所述时钟信号和所述控制指令产生所述驱动控制信号。
16.在其中一个实施方式中,所述基准电路还用于产生基准电压;所述摄像机马达控制芯片还包括:
17.欠压保护电路,与所述基准电路、所述数字逻辑电路电连接,用于在所述摄像机马达控制芯片的供电电压小于预设电压阈值时产生欠压锁定信号,将所述欠压锁定信号输出至所述数字逻辑电路;
18.所述数字逻辑电路还用于根据所述欠压锁定信号控制所述驱动电路不工作。
19.在其中一个实施方式中,所述摄像机马达控制芯片还包括:
20.热关断电路,与所述基准电路、所述数字逻辑电路电连接,用于在所述摄像机马达控制芯片的温度高于预设温度阈值时产生关断信号,并将所述关断信号输出至所述数字逻辑电路;
21.所述数字逻辑电路还用于根据所述关断信号控制所述驱动电路关断。
22.在其中一个实施方式中,所述数字逻辑电路通过串行接口或并行接口与所述主控芯片电连接。
23.在其中一个实施方式中,所述摄像机马达控制芯片还包括分别与所述数字逻辑电路电连接的使能接口、片选接口、时钟接口和写接口。
24.在其中一个实施方式中,所述摄像机马达控制芯片还包括与所述数字逻辑电路电连接的读接口。
25.在其中一个实施方式中,所述摄像机马达控制芯片还包括分别与所述俯仰调节马达电连接的上移第一接口、上移第二接口、下移第一接口和下移第二接口;所述摄像机马达控制芯片还包括分别与所述水平调节马达电连接的左移第一接口、左移第二接口、右移第一接口和右移第二接口;所述摄像机马达控制芯片还包括分别与所述红外线切换马达电连接的红外线切换第一接口、红外线切换第二接口。
26.第二方面,本技术实施例提供了一种摄像机,包括:主控芯片、俯仰调节马达、水平调节马达、红外线切换马达以及如第一方面任一项所述的摄像机马达控制芯片。
27.上述摄像机马达控制芯片及摄像机,摄像机马达控制芯片包括数字逻辑电路、基准电路和驱动电路。该摄像机马达控制芯片能够实现对俯仰调节马达、水平调节马达和红外线切换马达的同时控制,无需设置多个控制芯片,节约芯片成本,且节约芯片使用面积,从而节约摄像机的内部空间。另外,无需设置多个控制芯片能够节约主控芯片的i/o接口,减少设计布线,节约设计和封装成本。
附图说明
28.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
29.图1是本技术一实施例提供的摄像机结构示意图;
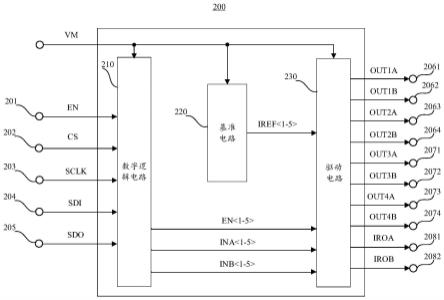
30.图2是本技术一实施例提供的摄像机马达控制芯片的结构示意图;
31.图3是本技术一实施例提供的摄像机马达控制芯片的连接关系示意图;
32.图4是本技术一实施例提供的摄像机马达控制芯片的封装结构示意图;
33.图5是本技术一实施例提供的驱动电路的结构示意图;
34.图6是本技术一实施例提供的俯仰调节控制单元的结构示意图;
35.图7是本技术一实施例提供的上移控制子单元的结构示意图;
36.图8是本技术一实施例提供的功率管驱动模块的电路图;
37.图9是本技术一实施例提供的功率管模块的电路图;
38.图10是本技术另一实施例提供的摄像机马达控制芯片的结构示意图。
39.附图标记说明:
40.摄像机10主控芯片100摄像机马达控制芯片200
41.使能接口201片选接口202时钟接口203
42.写接口204读接口205上移第一接口2061
43.上移第二接口2062下移第一接口2063下移第二接口2064
44.左移第一接口2071左移第二接口2072右移第一接口2073
45.右移第二接口2074红外线切换第一接口2081红外线切换第二接口2082
46.数字逻辑电路210基准电路220驱动电路230
47.俯仰调节控制单元231水平调节控制单元232红外线切换控制单元233
48.上移控制子单元235功率管驱动模块2351功率管模块2352
49.下移控制子单元237振荡器电路240欠压保护电路250
50.热关断电路260云台300云台主体310
51.俯仰调节马达320水平调节马达330镜头400
52.红外线切换马达500红外线截止滤光片600
具体实施方式
53.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
54.请参见图1,本技术实施例提供摄像机马达控制芯片200,应用于如图1所示的摄像机10。摄像机10包括主控芯片(micro control unit,mcu)100、摄像机马达控制芯片200、云台300、镜头400、红外线切换(infrared cut,ir cut)马达500和红外线截止滤光片600。
55.主控芯片100与摄像机马达控制芯片200电连接。摄像机马达控制芯片200与云台300、红外线切换马达500分别电连接。镜头400设置于云台300。可选的,云台300可以包括云台主体310和与云台主体310分别驱动连接的俯仰调节马达320、水平调节马达330。俯仰调节马达320、水平调节马达330和红外线切换马达500均与摄像机马达控制芯片200电连接。红外线截止滤光片600与镜头400层叠设置,红外线切换马达500与红外线截止滤光片600驱动连接。
56.具体的,主控芯片100用于向摄像机马达控制芯片200发送控制指令,摄像机马达控制芯片200根据控制指令控制俯仰调节马达320、水平调节马达330以及控制红外线切换马达500中的至少一个工作。俯仰调节马达320用于驱动云台主体310沿垂直方向俯仰转动,
即沿垂直方向上下转动,带动镜头400俯仰转动。水平调节马达330用于驱动云台主体310沿水平方向左右转动,带动镜头400左右转动。红外线切换马达500用于驱动切换红外线截止滤光片600。
57.可以理解,摄像机10还包括与红外线截止滤光片600层叠设置的全透光谱滤光片。当白天光线充足时,当红外线切换马达500不工作,保持红外线截止滤光片600工作,以滤除红外线。当夜间光线不足时,通过控制红外线切换马达500工作,以移除红外线截止滤光片600,通过全透光谱滤光片工作,从而提高摄像机10的低照性能。
58.传统技术中的摄像机,云台300通过云台控制芯片实现控制,红外线截止滤光片600通过光线切换控制芯片实现控制,两个芯片不仅会占用摄像机电路板上较大的面积,而且每个芯片均需要主控芯片提供对应的i/o接口来实现通信,占用主控芯片较多接口,并且芯片之间布线复杂,增加设计和封装成本。另外,传统技术中的摄像机,马达驱动普遍存在抖动和噪声过大的问题难以解决。本技术实施例提供的摄像机马达控制芯片和摄像机旨在解决上述技术问题。
59.以下结合附图,对本技术实施例提供的摄像机马达控制芯片和摄像机进行详细说明。
60.请参见图2至4,在一个实施例中,摄像机马达控制芯片200包括数字逻辑电路210、基准电路220和驱动电路230。其中,数字逻辑电路210与主控芯片100、驱动电路分别电连接。基准电路220与驱动电路230电连接。驱动电路230与俯仰调节马达320、水平调节马达330和红外线切换马达500均电连接。可以理解,摄像机马达控制芯片200的各个电路单元均与外部供电电源(图未示)电连接,由外部供电电源提供工作电压vm。
61.具体的,主控芯片100的输出端与数字逻辑电路210的输入端连接,数字逻辑电路210的输出端与驱动电路230的输入端连接。可选的,摄像机马达控制芯片200可以通过串行接口与主控芯片100电连接,也可以通过并行接口与主控芯片100电连接。数字逻辑电路210用于根据主控芯片100发送的控制指令产生驱动控制信号,并将该驱动控制信号发送至驱动电路230。可选的,数字逻辑电路210可以包括至少一个移位寄存器。
62.可选的,主控芯片100发送的控制指令可以包括使能信号en、片选信号cs、时钟通路信号sclk、写信号sdi和读信号sdo中的一种或多种。对应的,该摄像机马达控制芯片200的输出接口可以包括与数字逻辑电路210的各输入端连接的使能接口201、片选接口202、时钟接口203、写接口204和读接口205中的一个或多个。示例性的,摄像机马达控制芯片200的接口设置可以如图4所示。需要说明的是,以上接口中,可以根据摄像机马达控制芯片200的实际使用需求进行选择性设置,以节约主控芯片100的i/o接口资源。可选的,驱动控制信号可以包括使能信号en《1-5》、驱动信号ina《1-5》和驱动信号inb《1-5》。其中,en《1-5》包括分别对应驱动电路230五个功能模块的五种信号en1、en2、en3、en4和en5。类似的,驱动信号ina《1-5》和驱动信号inb《1-5》也分别包括五种信号。
63.基准电路220的输入端与外部供电电源电连接,基准电路220的输出端与驱动电路230的输入端电连接。基准电路220用于产生驱动电路230所需的基准电流iref《1-5》,并输入驱动电路230。iref《1-5》可以包括分别对应驱动电路230五个功能模块的五种信号iref1、iref2、iref3、iref4和iref5。驱动电路230的输出端与俯仰调节马达320、水平调节马达330和红外线切换马达500均电连接。驱动电路230用于根据基准电流和驱动控制信号
控制俯仰调节马达320、水平调节马达330和红外线切换马达500中的至少一个工作。
64.其中,驱动电路230向俯仰调节马达320输出的信号可以包括上移第一输出信号out1a、上移第二输出信号out1b、下移第一输出信号out2a、下移第二输出信号out2b。驱动电路230向水平调节马达330输出的信号可以包括左移第一输出信号out3a、左移第二输出信号out3b、右移第一输出信号out4a、右移第二输出信号out4b。驱动电路230向红外线切换马达500输出的信号可以包括红外线第一切换信号iroa和红外线第二切换信号irob。对应的,该摄像机马达控制芯片200的输出接口可以包括分别与俯仰调节马达电320连接的上移第一接口2061、上移第二接口2062、下移第一接口2063和下移第二接口2064;分别与所述水平调节马达330电连接的左移第一接口2071、左移第二接口2072、右移第一接口2073和右移第二接口2074;分别与所述红外线切换马达500电连接的红外线切换第一接口2081、红外线切换第二接口2082。
65.摄像机马达控制芯片200的工作原理如下:
66.主控芯片100接收上位机或服务器等发送的操作命令,并对操作命令进行解析,根据解析结果生成控制指令,并将操作指令发送至数字逻辑电路210。其中,该操作指令用于指示摄像机马达控制芯片200控制镜头400向左、向右、向上或向下转动,或者控制红外线截止滤光片600的切换。数字逻辑电路210接收控制指令,根据控制指令生成对应的驱动控制信号。驱动电路230根据基准电路提供的基准电流,以及数字逻辑电路210发送的驱动控制信号,对应驱动俯仰调节马达320、水平调节马达330或红外线切换马达500中的至少一个工作,以实现云台主体310向上、向下、向左或向右的转动,带动镜头400的转动;或者控制红外线截止滤光片600的工作或移除,控制镜头的透光性。
67.例如,当操作命令指示“镜头上移”时,主控芯片100根据该操作命令生成相应的控制指令并发送至数字逻辑电路210,数字逻辑电路210生成相应的驱动控制信号,以控制俯仰调节马达320向第一方向转动,实现云台主体310沿垂直方向向上转动,从而带动镜头400沿垂直方向向上转动。又例如,当白天光线充足时,上位机根据传感器检测的光线信息,向主控芯片100发送用于指示“滤光”的操作命令,主控芯片100根据该操作命令控制红外线切换马达500不工作,保持红外线截止滤光片600滤除红外线。当夜间光线不足时,上位机根据传感器检测的光线信息,向主控芯片100发送“透光”操作命令,摄像机马达控制芯片200控制红外线切换马达500工作,以移除红外线截止滤光片600,通过全透光谱滤光片工作。
68.本实施例提供的摄像机马达控制芯片200,包括数字逻辑电路210、基准电路220和驱动电路230。该摄像机马达控制芯片200能够实现对俯仰调节马达320、水平调节马达330和红外线切换马达500的同时控制,无需设置多个控制芯片,节约芯片成本,且节约芯片使用面积,从而节约摄像机10的内部空间。另外,无需设置多个控制芯片能够节约主控芯片的i/o接口,减少设计布线,节约设计和封装成本。
69.图5为一个实施例提供的驱动电路230的结构示意图。如图5所示,驱动电路230包括俯仰调节控制单元231、水平调节控制单元232和红外线切换控制单元233。俯仰调节控制单元231、水平调节控制单元232和红外线切换控制单元233的输入端均与基准电路220的输出端、数字逻辑电路210的输出端连接。
70.其中,俯仰调节控制单元231的输出端与俯仰调节马达320的输入端连接,俯仰调节控制单元231用于根据基准电流和数字逻辑电路210发送的俯仰调节信号控制俯仰调节
马达320工作,以实现云台主体310的俯仰转动。
71.图6为一个实施例中,俯仰调节控制单元231的结构示意图。如图6所示,俯仰调节控制单元231可以进一步包括上移控制子单元235和下移控制子单元237。上移控制子单元235用于驱动俯仰调节马达320产生第一方向的驱动力,使得云台主体310沿垂直方向向上转动。下移控制子单元237用于驱动俯仰调节马达320产生第二方向的驱动力,使得云台主体310沿垂直方向向下转动。其中,第一方向与第二方向相反。
72.示例性的,图7示出了一个实施例中上移控制子单元235的结构示意图。如图7所示,上移控制子单元235可以包括功率管驱动(gdrv)模块2351和功率管(drv)模块2352。功率管驱动模块2351与基准电路220的输出端连接。功率管驱动模块2351的输入端与数字逻辑电路210的输出端连接,功率管驱动模块2351的输出端与功率管驱动模块2352的输入端连接。功率管驱动模块2352的输出端与俯仰调节马达320的输入端连接。如图7所示,功率管驱动模块2351的输入信号包括iref1、en1a、in1a和in1b。功率管驱动模块2351的输出信号包括gna、gpa、gnb和gpb。gna、gpa、gnb和gpb作为功率管模块2352的输入信号,功率管模块2352的输出信号包括out1a和out2a。
73.在一个实施例中,功率管驱动模块2351的电路图可以如图8所示,功率管驱动模块2352的电路图可以如图9所示。以下结合图7至图9,对功率管驱动模块2351和功率管模块2352的输入输出信号进行进一步说明。iref1为基准电路220产生的基准电流,该基准电流用于向上移控制子单元235的功率管驱动模块2351提供偏置电流。en1a为数字逻辑电路210输出的用于对输出out1a进行使能控制的信号,en1b为数字逻辑电路210输入出的用于对输出out1b进行使能控制的信号。in1a为数字逻辑电路210输出的用于对输出out1a进行逻辑控制的电平信号,in1b为数字逻辑电路210输出的用于对输出out1b进行逻辑控制的电平信号。gna、gnb、gpa和gpb均为功率管驱动模块2351产生的栅极驱动电压信号。其中,gna用于向功率管模块2352中的功率管nm1的栅极供电,gnb用于向功率管模块2352中的功率管nm2的栅极供电。gpa用于向功率管模块2352中的功率管pm1的栅极供电,gpb用于向功率管模块2352中的功率管pm2的栅极供电。
74.下移控制子单元237的结构及工作原理与上移控制子单元235类似,在此不再赘述。
75.水平调节控制单元232的输出端与水平调节马达330的输入端连接,左右俯仰调节控制单元232用于根据基准电流和数字逻辑电路210发送的水平调节信号控制水平调节马达330工作,以实现云台主体310的沿水平方向的左右转动。水平调节控制单元232的工作原理和电路结构与俯仰调节控制单元231类似,在此不再赘述。
76.红外线切换控制单元233的输出端与红外切换马达500的输入端连接,红外线切换控制单元233用于根据基准电流和数字逻辑电路210发送的红外线切换信号控制红外线切换马达500工作,以实现对红外线截止滤光片600的切换。红外线切换控制单元233的工作原理和电路结构与俯仰调节控制单元231类似,在此不再赘述。
77.可以理解,相应的,数字逻辑电路210也可以包括三个移位寄存器,分别对应控制俯仰调节控制单元231、水平调节控制单元232和红外线切换控制单元233。
78.本实施例中,驱动电路230包括俯仰调节控制单元231、水平调节控制单元232和红外线切换控制单元233。通过设置单独的控制单元,对俯仰调节马达320、水平调节马达330
和红外线切换马达500进行独立控制,使得电路设计简单,灵活性高。
79.图10为另一个实施例中,摄像机马达控制芯片200的结构示意图。如图9所示,摄像机马达控制芯片200还可以进一步包括振荡器电路240、欠压保护电路250和热关断电路260。
80.其中,振荡器电路240的输出端与数字逻辑电路210的输入端连接。振荡器电路用于产生时钟信号clk,并将时钟信号clk输出至数字逻辑电路210。数字逻辑电路210根据时钟信号clk和主控芯片100发送的控制指令产生驱动控制信号。
81.本实施例提供的摄像机马达控制芯片200通过将振荡器电路240内置于芯片内部,防止外部环境对振荡器电路240的干扰,使得振荡器的振荡频率更加稳定,从而解决了控制芯片在驱动马达时普遍存在的噪声和抖动问题。
82.在一个实施例中,基准电路220还用于产生基准电压vref。欠压保护电路250和热关断电路260均与基准电路220电连接,基准电路220向欠压保护电路250和热关断电路260提供工作所需的基准电压vref。在摄像机马达控制芯片200的外部供电电压vm小于预设电压阈值时,欠压保护电路250产生欠压锁定信号uvlo_ok,并将欠压锁定信号uvlo_ok输出至数字逻辑电路210。数字逻辑电路210根据欠压锁定信号uvlo_ok向驱动电路230输出不工作的信号,驱动电路230不工作,芯片进入欠压保护模式。当外部供电电压vm大于或等于预设电压阈值时,欠压保护电路250向数字逻辑电路210输出退出欠压锁定信号,数字逻辑电路210控制驱动电路退出欠压保护模式,开始工作。本实施例中,通过设置欠压保护电路250,保护芯片在欠压情况下不工作,有效保护芯片电路,提高芯片的安全性和稳定性。
83.热关断电路260的输出端与数字逻辑电路210的输入端连接。热关断电路260用于在摄像机马达控制芯片200的温度高于预设温度阈值时,产生关断信号,并将关断信号ts_ok输出至数字逻辑电路210。数字逻辑电路210根据关断信号ts_ok控制驱动电路230关断。本实施例中,通过热关断电路260使得芯片在温度过高时关断,防止芯片过热,有效保护芯片电路,进一步提高芯片的稳定性和可靠性。
84.在一个实施例中,数字逻辑电路210的输出端还与振荡器电路240、欠压保护电路250、热关断电路260和基准电路220的使能端连接。当主控芯片100向数字逻辑电路210发送低功耗指令时,数字逻辑电路210向欠压保护电路250、热关断电路260和基准电路220发送使能信号en0,关断欠压保护电路250、热关断电路260和基准电路220,向振荡器电路240发送使能信号en1,关断振荡器电路240,使得整个摄像机马达控制芯片200进入低功耗模式,从而降低芯片能耗,节约电量。
85.本技术一个实施例还提供一种摄像机10,如图1所示,该摄像机10包括主控芯片100、俯仰调节马达320、水平调节马达330、红外线切换马达500以及如上任一实施例所述的摄像机马达控制芯片200。该摄像机10的结构、工作原理和有益效果等参见上述实施例,在此不再赘述。
86.以上所述实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1